You might also like
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Control Systems Two Marks QuestionDocument41 pagesControl Systems Two Marks QuestionSk WajuddinNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- Experiment 1 AIM: Absolute Stability, Relative Stability, and Steady-State ErrorDocument8 pagesExperiment 1 AIM: Absolute Stability, Relative Stability, and Steady-State ErrorSaranshNo ratings yet
- Assignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaDocument4 pagesAssignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaSyed AfzalNo ratings yet
- Time ResponseDocument7 pagesTime Responseeugeni madaNo ratings yet
- Transient and Steady State AnalysisDocument22 pagesTransient and Steady State AnalysisRajath UpadhyaNo ratings yet
- EC2255 Controls Systems 2marks With Answers (Sem4)Document39 pagesEC2255 Controls Systems 2marks With Answers (Sem4)lvrevathiNo ratings yet
- Industrial Control Chapter 1Document19 pagesIndustrial Control Chapter 1Qayyum AqasyahNo ratings yet
- Cs-Module 1 NotesDocument58 pagesCs-Module 1 NotesSuprithaNo ratings yet
- Control SystemlDocument44 pagesControl SystemlSolid Work and Mechanical software TutorialNo ratings yet
- Unit I NotesDocument43 pagesUnit I Notesaravinth69601No ratings yet
- Government Polytechnic Muzaffarpur: Name of The Lab: Control SystemDocument15 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Control SystemTapobroto ChatterjeeNo ratings yet
- Me55 Control Engineering: Sharanabasava C PilliDocument12 pagesMe55 Control Engineering: Sharanabasava C PilliS C PilliNo ratings yet
- Control Engineering: Closed-Loop Poles Are The Positions of The Poles (OrDocument9 pagesControl Engineering: Closed-Loop Poles Are The Positions of The Poles (OrWanambwa SilagiNo ratings yet
- Introduction To Linear Control System PDFDocument13 pagesIntroduction To Linear Control System PDFAmitava BiswasNo ratings yet
- Control System Viva QuestionDocument13 pagesControl System Viva QuestionMasudur RahmanNo ratings yet
- EC2255 - Control Systems Two Marks Questi PDFDocument38 pagesEC2255 - Control Systems Two Marks Questi PDFdr mbaluNo ratings yet
- Unit I: Fundamentals of Control System: Lecturer: D. R. PardeshiDocument18 pagesUnit I: Fundamentals of Control System: Lecturer: D. R. PardeshiDnyaneshwar RajputNo ratings yet
- Ec2255 - Control SystemDocument42 pagesEc2255 - Control SystemK.RajkumarNo ratings yet
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocument100 pagesOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- Control Systems NotesDocument50 pagesControl Systems NotesEEE CRRNo ratings yet
- Lecture 1 Control SystemsDocument18 pagesLecture 1 Control SystemsMohammed AshrafNo ratings yet
- EC2255-Solved Problems in Control System IV Semester ECEDocument182 pagesEC2255-Solved Problems in Control System IV Semester ECEBEKHITI BelkacemNo ratings yet
- @2 - Mathematical Modeling of Control System ?Document52 pages@2 - Mathematical Modeling of Control System ?Mir Md Mofachel HossainNo ratings yet
- MAHAKAVI BHARATHIYAR COLLEGE ECE CONTROL SYSTEM TWO MARKS QUESTIONSDocument42 pagesMAHAKAVI BHARATHIYAR COLLEGE ECE CONTROL SYSTEM TWO MARKS QUESTIONSselvi0412No ratings yet
- Time Response Characteristics of Second-Order Control SystemsDocument25 pagesTime Response Characteristics of Second-Order Control SystemsganesanNo ratings yet
- ELM 322, Control Systems Control Systems Spring 2015Document37 pagesELM 322, Control Systems Control Systems Spring 2015kaanNo ratings yet
- Automatic Control System Lec1Document46 pagesAutomatic Control System Lec1Mohamed ElsoodyNo ratings yet
- Introduction to control systems in 40 charactersDocument7 pagesIntroduction to control systems in 40 charactersLaily EdarisNo ratings yet
- Unit IDocument7 pagesUnit IanandhNo ratings yet
- Time - Domain AnalysisDocument30 pagesTime - Domain Analysisabhishek topwalNo ratings yet
- Basic Terminologies in Control System SystemDocument8 pagesBasic Terminologies in Control System SystemPandimadevi GanesanNo ratings yet
- Lecture - 1 Introduction To AC PDFDocument56 pagesLecture - 1 Introduction To AC PDFabusyafiNo ratings yet
- Introduction Review of Laplace TransformsDocument35 pagesIntroduction Review of Laplace TransformsVeilNo ratings yet
- Assignment 01: 1 What Is An Open Loop Control System and Closed Loop Control SystemDocument5 pagesAssignment 01: 1 What Is An Open Loop Control System and Closed Loop Control SystemSyed AfzalNo ratings yet
- Time Response of Second Order SystemDocument6 pagesTime Response of Second Order SystempraneethNo ratings yet
- EC2255-Solved Problems in Control Systems PDFDocument182 pagesEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (2)
- ControlDocument34 pagesControlmurtadaNo ratings yet
- Time Response AnalysisDocument37 pagesTime Response Analysis7014KANISHKA JAISWALNo ratings yet
- Feedback and Control SystemsDocument33 pagesFeedback and Control SystemsJullie Mae MierNo ratings yet
- Vtusolution.in - Introduction to Control SystemsDocument122 pagesVtusolution.in - Introduction to Control Systemsbujangadp123No ratings yet
- CS Two MarksDocument7 pagesCS Two MarkssivaeinfoNo ratings yet
- CS Lecture Notes Units 1 2 3Document88 pagesCS Lecture Notes Units 1 2 3sushinkNo ratings yet
- Introduction To First Order SystemsDocument4 pagesIntroduction To First Order SystemsSyafiiqahNo ratings yet
- TEL 433 Lect 01 NOTE IntroductionDocument9 pagesTEL 433 Lect 01 NOTE IntroductionTestimonyNo ratings yet
- Cals RismanDocument5 pagesCals RismanRisman YusufNo ratings yet
- Control Engineering: HapterDocument45 pagesControl Engineering: Hapterkyaw phone htetNo ratings yet
- Assignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaDocument4 pagesAssignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaSyed AfzalNo ratings yet
- Control Systems NotesDocument152 pagesControl Systems Notesdarlachantisaideepthi450No ratings yet
- Servomechanism and Control B PDFDocument7 pagesServomechanism and Control B PDFAshok BansalNo ratings yet
- Linear Control System: Presented by Imran Basha SyedDocument35 pagesLinear Control System: Presented by Imran Basha SyedSyed Imran BashaNo ratings yet
- Control SystemDocument11 pagesControl Systembalaji1986No ratings yet
- Control System MidtermDocument19 pagesControl System MidtermSumangil, Maria Margarita P.No ratings yet
- Ec Formula Notes 11Document369 pagesEc Formula Notes 11Tharun kondaNo ratings yet
- Control System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizDocument7 pagesControl System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizAmanNo ratings yet
- A Student Guide To Clasical ControlDocument5 pagesA Student Guide To Clasical ControlSusana Vázquez VallínNo ratings yet
- EEN-305 Advanced Control Systems Lab ReportDocument16 pagesEEN-305 Advanced Control Systems Lab ReportRitik MathurNo ratings yet
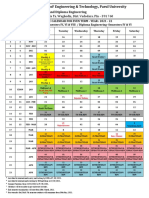
- Academic Calendar 21 - 22 EvenDocument1 pageAcademic Calendar 21 - 22 EvenSudhanshu SinghNo ratings yet
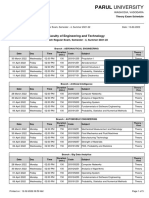
- Parul University: Faculty of Engineering and TechnologyDocument5 pagesParul University: Faculty of Engineering and TechnologySudhanshu SinghNo ratings yet
- Frequency Response Analysis Bode PlotsDocument76 pagesFrequency Response Analysis Bode PlotsSudhanshu Singh0% (1)
- Em 2 Chapter 1Document15 pagesEm 2 Chapter 1Sudhanshu SinghNo ratings yet
- CSE MCQsDocument14 pagesCSE MCQsSudhanshu SinghNo ratings yet
- Booking Confirmation On IRCTC, Train: 02947, 0 3 - Apr-2022, 3A, CYI - PNBEDocument1 pageBooking Confirmation On IRCTC, Train: 02947, 0 3 - Apr-2022, 3A, CYI - PNBESudhanshu SinghNo ratings yet
- Em 2 Chapter 3Document51 pagesEm 2 Chapter 3Sudhanshu SinghNo ratings yet
- Gmail - Booking Confirmation On IRCTC, Train - 02947, 20-Oct-2021, 3A, CYI - PNBE-Copy-1Document1 pageGmail - Booking Confirmation On IRCTC, Train - 02947, 20-Oct-2021, 3A, CYI - PNBE-Copy-1Sudhanshu SinghNo ratings yet
- Thursday, 14th April 10:00 AM Booking ID:354058 Booking Date: Sunday, April 10,2022 Order ID: 17760198071Document1 pageThursday, 14th April 10:00 AM Booking ID:354058 Booking Date: Sunday, April 10,2022 Order ID: 17760198071Sudhanshu SinghNo ratings yet
- Operations Management Processes and Supply Chains 10th Edition Krajewski Ritzman Malhotra Solution ManualDocument37 pagesOperations Management Processes and Supply Chains 10th Edition Krajewski Ritzman Malhotra Solution Manualmary100% (17)
- Iterative Computations of The Transportation AlgorithmDocument35 pagesIterative Computations of The Transportation AlgorithmAngad SehdevNo ratings yet
- Configuration Management Plan TemplateDocument32 pagesConfiguration Management Plan Templatesanjay Sharma100% (2)
- Apple VruisesDocument6 pagesApple VruisesSanjay MohanNo ratings yet
- Expert Systems CharacteristicsDocument26 pagesExpert Systems CharacteristicsPawanLUMBA100% (3)
- IT7T5DDocument2 pagesIT7T5DAnita Sofia KeyserNo ratings yet
- Questions & Answers On Software Engineering Basics Software Engineering Ethics - 1Document25 pagesQuestions & Answers On Software Engineering Basics Software Engineering Ethics - 1samra rafiqNo ratings yet
- Ics SecurityDocument5 pagesIcs SecurityMahbub Ul AlamNo ratings yet
- Assignment 2Document5 pagesAssignment 2TeeZateNo ratings yet
- Cycle Time Management CTMDocument4 pagesCycle Time Management CTMeddiekuangNo ratings yet
- A Review On The Effectiveness of Machine Learning and Deep Learning Algorithms For Cyber SecurityDocument19 pagesA Review On The Effectiveness of Machine Learning and Deep Learning Algorithms For Cyber SecurityShehara FernandoNo ratings yet
- Software Engineering PrinciplesDocument57 pagesSoftware Engineering PrinciplesaliNo ratings yet
- Model 4 Best Baseline ModelDocument1,101 pagesModel 4 Best Baseline ModelandrewgeorgecherianNo ratings yet
- Pba Exam MockDocument26 pagesPba Exam Mockمرزا عظيم بيگNo ratings yet
- UntitledDocument6 pagesUntitledSulit Trisha Mae V.No ratings yet
- Assignment 05: 1 Write A Short Note On State Space Representation of A Control SystemDocument2 pagesAssignment 05: 1 Write A Short Note On State Space Representation of A Control SystemSyed AfzalNo ratings yet
- SOFTWARE ENGINEERING Question Answers Unit 3-6 ImpDocument24 pagesSOFTWARE ENGINEERING Question Answers Unit 3-6 ImpGaurav GhandatNo ratings yet
- ICBA Week 2 Webinar SlidesDocument21 pagesICBA Week 2 Webinar SlidesDamith ErangaNo ratings yet
- b07 - Process Simulate Virtual Commissioning PDFDocument25 pagesb07 - Process Simulate Virtual Commissioning PDFthigale empireNo ratings yet
- CyberneticsDocument61 pagesCyberneticsPriyankar Sinha100% (1)
- Traditional vs Object-Oriented System Analysis & DesignDocument18 pagesTraditional vs Object-Oriented System Analysis & DesignJennylyn BaladjayNo ratings yet
- Difference Between PERT and CPM (With Comparison Chart) - Key DifferencesDocument11 pagesDifference Between PERT and CPM (With Comparison Chart) - Key DifferencesmalusenthilNo ratings yet
- Ece-IV-control Systems (10es43) - Question PaperDocument12 pagesEce-IV-control Systems (10es43) - Question PaperAbdul AzeezNo ratings yet
- SDM AssignmentDocument4 pagesSDM AssignmentElaine LaLaNo ratings yet
- Introduction to Psychology Lecture 10 Memory Stages and TypesDocument14 pagesIntroduction to Psychology Lecture 10 Memory Stages and TypesLovely PrincessNo ratings yet
- Business IntelligenceDocument70 pagesBusiness IntelligenceNayan Rajput100% (1)
- What Is Verification and Validation, NAFEMSDocument4 pagesWhat Is Verification and Validation, NAFEMSgulilero_yoNo ratings yet
- Quiz 1 Quiz 1: Congratulations! You Passed!Document1 pageQuiz 1 Quiz 1: Congratulations! You Passed!Hamid HamidoNo ratings yet
- How everyday products can improve usability and conceptual modelingDocument6 pagesHow everyday products can improve usability and conceptual modelingMuhammad Arsalan KhanNo ratings yet
- English To Luganda TranslationDocument13 pagesEnglish To Luganda TranslationKisejjere RashidNo ratings yet