Transfer Functions
Unit 1: Process Control Loop
Process control loop
Pressure
Flow
Level
Temperature
pH
Process
dP cell
Capacitance
Radar, Sonic
Magnetic
Resistance
IR/Laser
Sensor
Transmitter
Controller
Transducer
Control valve
4-20 mA
1-5 Vdc
PID
Fuzzy logic
4-20 mA
3-15 psig
Linear
Equal percentage
Abdul Aziz Ishak, Universiti Teknologi MARA Malaysia (2009)
I/P
�Unit 1: Process Control Loop
Process control loop
Process
Sensor
Transmitter
Controller
SP
Pressure
Flow
Level
Temperature
pH
dP cell
Capacitance
Radar, Sonic
Magnetic
Resistance
IR/Laser
4-20 mA
1-5 Vdc
Field/profibus
CONTROLLER
TRANSMITTER
CONTROL
VALVE
PID
Fuzzy logic
PROCESS
Transducer
Control valve
4-20 mA
3-15 psig
Linear
Equal percentage
PV
*SP = set point
*PV = process value
Abdul Aziz Ishak, Universiti Teknologi MARA Malaysia (2009)
�Unit 1: Process Control Loop
Process control loop: The Block Diagram
PROCESS
CONTROL
VALVE
SP
CONTROLLER
Simulation mode
TRANSMITTER
Abdul Aziz Ishak, Universiti Teknologi MARA Malaysia (2009)
PV
�Transfer Functions
Convenient representation of a linear, dynamic model.
Chapter 4
A transfer function (TF) relates one input and one output:
x t
y t
system
X s
Y s
The following terminology is used:
x
y
input
output
forcing function
response
cause
effect
The TF model enables us to determine the output response to
any change in an input.
�Definition of the transfer function:
Let G(s) denote the transfer function between an input, x, and an
output, y. Then, by definition
Chapter 4
G s
Y s
X s
where:
Y s L y t
X s L x t
�Transfer Functions for a Process
Chapter 4
Example: Stirred Tank Heating
System
Figure 2.3 Stirred-tank heating process with constant holdup, V.
�Equation (1) is the energy balance of the stirred-tank heating
system, assuming constant liquid holdup and flow rates:
dT
V C
wC Ti T Q
dt
(1)
(2-36)
Chapter 4
Suppose the process is at steady state:
0 wC Ti T Q
(2)
Subtract (2) from (1):
dT
V C
wC Ti Ti T T Q Q
dt
(3)
�But,
Chapter 4
dT
V C
wC Ti T Q
dt
(4)
where the deviation variables are
T T T , Ti Ti Ti , Q Q Q
Take L of (4):
Ti s T s Q s (5)
V C sT s T 0 wC
At the initial steady state, T(0) = 0.
� Ti s T s Q s (5)
V C sT s T 0 wC
Chapter 4
Rearrange (5) to solve for
T s
K
1
Q s
Ti s
s 1
s 1
where
1
V
K
and
wC
w
T (s)=G1(s)Q(s) G2(s)Ti(s)
(6)
T s
K
1
Q s
Ti s
s 1
s 1
T (s)=G1(s)Q(s) G2(s)Ti(s)
(6)
K
1
T s
Q s
Ti s
s 1
s 1
(6)
K (gain) it describes how far the output will travel
with the change of the input.
*If a process has a large K, then a small change in the
input will cause the output to move a large amount. If a
process has a small K, the same input change will move
the output a small amount
(time constant) describes how fast the output moves
in response to a change in the input.
*The time constant must be positive and it must have units of
time
�Order of transfer function
General first order transfer function
K
Y (s )
X (s )
s 1
Chapter 4
General second order transfer function
Y (s )
X (s )
s 2s 1
2
First-order-plus-dead-time (FOPDT)
Ke st 0
Y (s )
X (s )
s 1
�Response with time delay
X(t)
Y(t)
t=0 t=t0
to=Time delay/dead time
�All first order systems forced by a step function will have
a response of this same shape.
Step response for first order system
�To calculate the gain and time constant from
the graph
y
Gain, K
x
Time constant, value of t which the response is
63.2% complete
�Transfer Functions for a Transmitter
PV(s)
Process variable
H (s )
H(s)
C(s)
Transmitter output
C (s )
KT
PV (s ) T s 1
KT = transmitter gain
T = transmitter time constant
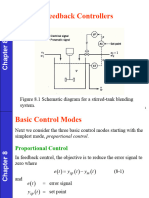
�Transfer Functions for a Controller
Proportional Control
For proportional control, the controller output is proportional to
the error signal,
p t p Kce t
(8-2)
where:
p t controller output
p bias (steady-state) value
K c controller gain (usually dimensionless)
p is controller output when the error is zero
-The proportionality is given by the controller gain, Kc
-The controller gain determines how much the output
from the controller changes for a given change in error
Transfer function
�Integral Control
For integral control action, the controller output depends on the
integral of the error signal over time,
1
p t p
I
0 e t * dt *
(8-7)
where I , an adjustable parameter referred to as the integral time
or reset time, has units of time.
Integral control action is normally used in conjunction with
proportional control as the proportional-integral (PI) controller :
1
p t p Kc e t
I
0 e t * dt *
t
(8-8)
19
�The corresponding transfer function for the PI controller in is
given by
Transfer function
The PI controller has two parameters, Kc and I
�Derivative Control
The function of derivative control gives the controller the
capability to anticipate where the process is heading by
calculating the derivative error
Thus, for ideal derivative action,
p t p D
de t
dt
where D , the derivative time, has units of time.
(8-10)
�Proportional-Integral-Derivative (PID) Control
Now we consider the combination of the proportional, integral,
and derivative control modes as a PID controller.
Form of PID Control
The form of the PID control algorithm is given by
1 t
p t p K c e t e t * dt *
I 0
The corresponding transfer function is:
Transfer function
de t
dt
(8-13)