You might also like
- % Bsformula.mDocument30 pages% Bsformula.mapi-616455436No ratings yet
- Homework 110071607 林郁揚: %Bsprice.MDocument31 pagesHomework 110071607 林郁揚: %Bsprice.Mapi-616455436No ratings yet
- Tren de Pulsos: Señales Variables Con Fourier en MatlabDocument6 pagesTren de Pulsos: Señales Variables Con Fourier en MatlabramakiteNo ratings yet
- Tugas 1 Inversi: Risky Hakim Bayakmiko 03411540000010Document5 pagesTugas 1 Inversi: Risky Hakim Bayakmiko 03411540000010Anonymous 4vyardxNo ratings yet
- Assignment4 Octave TemplateDocument10 pagesAssignment4 Octave TemplateHenry OkoyeNo ratings yet
- Matlab CompiledDocument34 pagesMatlab CompiledAyanNo ratings yet
- Modeling and Control of an Inverted PendulumDocument41 pagesModeling and Control of an Inverted PendulumSamuelNo ratings yet
- MatcodesDocument5 pagesMatcodesAcet AldehydeNo ratings yet
- Domaci Pedja: For For If End End EndDocument10 pagesDomaci Pedja: For For If End End EndМарко БулатовићNo ratings yet
- FunctionDocument66 pagesFunctionapi-616455436No ratings yet
- MATLAB program for modeling seismic ray tracing and travel time curvesDocument10 pagesMATLAB program for modeling seismic ray tracing and travel time curvesDewi RohmayaniNo ratings yet
- Examples of Matlab 24-7-18Document9 pagesExamples of Matlab 24-7-18Hasan RabyNo ratings yet
- QR Factorization AccuracyDocument5 pagesQR Factorization AccuracysdfashvfjghNo ratings yet
- Universidad técnica particular de Loja estudiante señales procesamiento analógicas digitalesDocument17 pagesUniversidad técnica particular de Loja estudiante señales procesamiento analógicas digitalesLeonardo SarangoNo ratings yet
- Constanta Depi MatlabDocument7 pagesConstanta Depi MatlabAdrian HurmuzNo ratings yet
- MATLAB Numerical Methods Code ExamplesDocument23 pagesMATLAB Numerical Methods Code ExamplessrujanNo ratings yet
- Ex 3Document6 pagesEx 3Maan SinghNo ratings yet
- MatlabDocument14 pagesMatlabDiana UlloaNo ratings yet
- BLEN.U4ECE22046 - Rahul VarmaDocument26 pagesBLEN.U4ECE22046 - Rahul VarmadommarajurahulvarmaNo ratings yet
- DSP Lab ManualDocument51 pagesDSP Lab ManualShahin4220No ratings yet
- Labtask1: GeneratedatasetDocument12 pagesLabtask1: GeneratedatasetSohaib SajidNo ratings yet
- Satya Permana Yoga P 03411540000042 1. Seismik Refleksi: Ta ObservasiDocument4 pagesSatya Permana Yoga P 03411540000042 1. Seismik Refleksi: Ta ObservasibagusNo ratings yet
- Procesamiento de Señales Analógicas y DigitalesDocument30 pagesProcesamiento de Señales Analógicas y DigitalesLeonardo SarangoNo ratings yet
- Experiment-5: AIM:WAP in MATLAB To Find The Root of Following Equations Using Gauss EliminationDocument26 pagesExperiment-5: AIM:WAP in MATLAB To Find The Root of Following Equations Using Gauss EliminationSanjeev Kumar PandeyNo ratings yet
- All All: If EndDocument3 pagesAll All: If EndJhosset Jose Enriquez ReyesNo ratings yet
- Matlab code to plot "vg/c" vs "\delta x/\lambdaDocument2 pagesMatlab code to plot "vg/c" vs "\delta x/\lambdaVikram GrewalNo ratings yet
- Simulated Output FullDocument33 pagesSimulated Output FullrbkNo ratings yet
- 6 F 193483165 D 13 F 6255 ADocument15 pages6 F 193483165 D 13 F 6255 Aapi-616455436No ratings yet
- Screenshot 2023-12-09 at 11.05.11 AMDocument33 pagesScreenshot 2023-12-09 at 11.05.11 AMhey.imcordenNo ratings yet
- CS2405 Computer Graphics Lab ManualDocument70 pagesCS2405 Computer Graphics Lab ManualDhilip Prabakaran100% (2)
- 제출용Document28 pages제출용kijmm0997No ratings yet
- MATLAB ExamDocument2 pagesMATLAB Examwasarollingstone_842No ratings yet
- ANM AssignmentDocument12 pagesANM AssignmentSajith Chandran ReoNo ratings yet
- MUHAMMAD MAAZ (N.A.Coding)Document13 pagesMUHAMMAD MAAZ (N.A.Coding)Muhammad MaazNo ratings yet
- Code:: 1. Draw A Straight Segment Connecting The Points (3,1) and (8, 7) Using Bresenham's Line Drawing AlgorithmDocument16 pagesCode:: 1. Draw A Straight Segment Connecting The Points (3,1) and (8, 7) Using Bresenham's Line Drawing AlgorithmJoybrata PalNo ratings yet
- ImmDocument3 pagesImmZvonko RadosavljevicNo ratings yet
- Submitted By:: Ravi Kumar ROLL NO. 2K13/EL/069Document42 pagesSubmitted By:: Ravi Kumar ROLL NO. 2K13/EL/069RaviKumarNo ratings yet
- Sample ChE 26 CodesDocument8 pagesSample ChE 26 CodesRyanChristianSuplitoNo ratings yet
- King Ooo 11111Document10 pagesKing Ooo 11111Muhammad MaazNo ratings yet
- Practical 1: # 2D Linear Convolution, Circular Convolution Between Two 2D MatricesDocument21 pagesPractical 1: # 2D Linear Convolution, Circular Convolution Between Two 2D MatricesJustin Sebastian100% (1)
- A. Listing Program: 1. Skema Implisit Pada Heat EquationDocument8 pagesA. Listing Program: 1. Skema Implisit Pada Heat EquationFebu LuthfianiNo ratings yet
- Sukma Luong Ayu - GridSearchDocument2 pagesSukma Luong Ayu - GridSearch325Sukma Luong AyuNo ratings yet
- DC Lab ManualDocument16 pagesDC Lab ManualMahaboob SubahanNo ratings yet
- Simulate PID Controller Tuning Using PSODocument1 pageSimulate PID Controller Tuning Using PSOabdo abdoNo ratings yet
- DSP Exp 3Document10 pagesDSP Exp 3Hjalmark SanchezNo ratings yet
- Complete Calculus 2Document19 pagesComplete Calculus 2Tutul MalakarNo ratings yet
- Matlab Plots: B (0:0.001:10) A SQRT (4 B) Plot (B, A, B,-A) Hold On Rectangle ('Position', (-10,-10,20,20) ) Hold OnDocument8 pagesMatlab Plots: B (0:0.001:10) A SQRT (4 B) Plot (B, A, B,-A) Hold On Rectangle ('Position', (-10,-10,20,20) ) Hold OnAdnan RazaNo ratings yet
- BM2406 Digital Image Processing Lab ManualDocument24 pagesBM2406 Digital Image Processing Lab ManualDeepak DennisonNo ratings yet
- Probleme MNCPDDocument54 pagesProbleme MNCPDClauditsa ClauNo ratings yet
- For Lab: Submitted By: Warda Tu Zahra BSEE 17-21 Dated: 23 Feb 2021Document7 pagesFor Lab: Submitted By: Warda Tu Zahra BSEE 17-21 Dated: 23 Feb 2021Warda tu ZahraNo ratings yet
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- ROB521 Visual OdysseyDocument7 pagesROB521 Visual Odyssey11 1No ratings yet
- Matlab Assignment 22bec038Document20 pagesMatlab Assignment 22bec038Diya ShahNo ratings yet
- Matlab CodesDocument20 pagesMatlab CodesHarsha VardhanNo ratings yet
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- Step ResponseDocument14 pagesStep ResponsesachinNo ratings yet
- Chapter 6 The Laplace TransformDocument220 pagesChapter 6 The Laplace TransformFilipe TebasNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
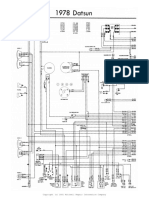
- Datsun 620 Pickup Wiring Diagram 1978Document2 pagesDatsun 620 Pickup Wiring Diagram 1978diego santosNo ratings yet
- THUMS AF05 V7 Documentation 202309Document182 pagesTHUMS AF05 V7 Documentation 202309diego santosNo ratings yet
- Planos Juntas 1 y 2 Motor-eslabonDocument1 pagePlanos Juntas 1 y 2 Motor-eslabondiego santosNo ratings yet
- Planos Angulo WaistDocument1 pagePlanos Angulo Waistdiego santosNo ratings yet
- Audi Paralelo 2Document2 pagesAudi Paralelo 2Damian FediukNo ratings yet
- Ecq. Cinematica DirectaDocument1 pageEcq. Cinematica Directadiego santosNo ratings yet
- When NOT to Use Definite ArticlesDocument4 pagesWhen NOT to Use Definite Articlesdiego santosNo ratings yet
- Second TESTDocument3 pagesSecond TESTdiego santosNo ratings yet
- Listado Verbos (Nuevo)Document8 pagesListado Verbos (Nuevo)ESTEBAN QUINTERO PARRANo ratings yet
- 5to Semestre A2 Consolidation1Document114 pages5to Semestre A2 Consolidation1diego santos100% (2)
- 10 - (Rahman) The Relationship Between Chest Tube Size and Clinical Outcome in Pleural InfectionDocument8 pages10 - (Rahman) The Relationship Between Chest Tube Size and Clinical Outcome in Pleural InfectionfaisaldanyaniNo ratings yet
- Sharp Sharp Cash Register Xe A207 Users Manual 284068Document1 pageSharp Sharp Cash Register Xe A207 Users Manual 284068Zeila CordeiroNo ratings yet
- Rotorvane Tea OrthodoxDocument9 pagesRotorvane Tea OrthodoxyurinaNo ratings yet
- AAPD Reference Manual - Pediatric Dentistry 2010-2011Document336 pagesAAPD Reference Manual - Pediatric Dentistry 2010-2011Tiara100% (1)
- Omega: Mahdi Alinaghian, Nadia ShokouhiDocument15 pagesOmega: Mahdi Alinaghian, Nadia ShokouhiMohcine ES-SADQINo ratings yet
- Project Name: Purchase Order Management Creation Date: 26 October 2021 Created By: Sofiyan PathanDocument2 pagesProject Name: Purchase Order Management Creation Date: 26 October 2021 Created By: Sofiyan PathanAtul PawarNo ratings yet
- 6.1.2 The Solar SystemDocument4 pages6.1.2 The Solar System205 NursyazliyanaNo ratings yet
- A Daily Morning PrayerDocument8 pagesA Daily Morning Prayerjhustine05100% (1)
- Database AwsDocument15 pagesDatabase AwsHareesha N GNo ratings yet
- Knowledge Paper XDocument28 pagesKnowledge Paper XLaurențiu Cătălin NeagoeNo ratings yet
- 02.casebook - BLDG Repairs & Maint - Chapter 1 - 2011 (Water Seepage)Document13 pages02.casebook - BLDG Repairs & Maint - Chapter 1 - 2011 (Water Seepage)Hang kong TseNo ratings yet
- Standard JKR Spec For Bridge LoadingDocument5 pagesStandard JKR Spec For Bridge LoadingHong Rui ChongNo ratings yet
- What Is Managerial Economics? Explain Its Nature, Scope and ItsDocument9 pagesWhat Is Managerial Economics? Explain Its Nature, Scope and Itsn13shukla85% (20)
- Rubric Poetry Pyramid 4th GradeDocument2 pagesRubric Poetry Pyramid 4th Gradeapi-302020585No ratings yet
- Opera Arias and Sinfonias: VivaldiDocument22 pagesOpera Arias and Sinfonias: VivaldiDardo CocettaNo ratings yet
- Remote Control Panel (RCP) User'S GuideDocument13 pagesRemote Control Panel (RCP) User'S GuideAdrian PuscasNo ratings yet
- Template Project Approach QuestionnaireDocument1 pageTemplate Project Approach QuestionnaireSara AliNo ratings yet
- SD Series Digital AC Servo System User Manual GuideDocument66 pagesSD Series Digital AC Servo System User Manual GuideAdnene SaanounNo ratings yet
- 2017 Expert Packet Workshop V3 + ExerciseDocument268 pages2017 Expert Packet Workshop V3 + ExerciseJeya ChandranNo ratings yet
- Mental Status Examination FormatDocument7 pagesMental Status Examination FormatMala Rasaily100% (3)
- Economics of Power GenerationDocument32 pagesEconomics of Power GenerationKimberly Jade VillaganasNo ratings yet
- R4850G2 Rectifier Data Sheet 05Document2 pagesR4850G2 Rectifier Data Sheet 05PP CharlyNo ratings yet
- Formulas by LufkinDocument1 pageFormulas by LufkinSebastianCicognaNo ratings yet
- MPMC All Questions and AnswerDocument6 pagesMPMC All Questions and AnswerMODERN TELUGAMMAYINo ratings yet
- Bee WareDocument49 pagesBee WareJayNo ratings yet
- The Secret Science of Shaktipat - Guide To Initiation 13 September 2020Document77 pagesThe Secret Science of Shaktipat - Guide To Initiation 13 September 2020Patrick JenksNo ratings yet
- Results and DiscussionsDocument13 pagesResults and DiscussionsEdpher Leo SindolNo ratings yet
- Development PlanningDocument15 pagesDevelopment PlanningSamuelNo ratings yet
- LogDocument15 pagesLogandrew_hm925635No ratings yet
- STAR GLASS - D66f5e - PDFDocument126 pagesSTAR GLASS - D66f5e - PDFJessie O.BechaydaNo ratings yet


























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)