You might also like
- CBLM Bartending Ncii # 1 & 4aDocument265 pagesCBLM Bartending Ncii # 1 & 4aQueenly Mendoza Aguilar81% (21)
- Developments in The Built EnvironmentDocument29 pagesDevelopments in The Built EnvironmentDiego Armando Huari SánchezNo ratings yet
- 1 s2.0 S0360835223002863 MainDocument22 pages1 s2.0 S0360835223002863 MainFranzola FranNo ratings yet
- Implications of Construction 4.0 To The Workforce and Organizational StructuresDocument14 pagesImplications of Construction 4.0 To The Workforce and Organizational StructuresSantiago Acevedo HerreraraNo ratings yet
- Computer VisionDocument7 pagesComputer Visionyujiao liNo ratings yet
- Bill of LabourDocument10 pagesBill of LabourCHIMA ikechukwuNo ratings yet
- Id 287 11 1 52 60Document10 pagesId 287 11 1 52 60Yager Terver BenjaminNo ratings yet
- 样刊论文Document18 pages样刊论文黄ssNo ratings yet
- DIGITAL TWINS AND LEAN CONSTRUCTION CHALLENGES FOR FUTURE PRACTICAL APPLICATIONS - 2022 - The International Group For Lean ConstructionDocument12 pagesDIGITAL TWINS AND LEAN CONSTRUCTION CHALLENGES FOR FUTURE PRACTICAL APPLICATIONS - 2022 - The International Group For Lean ConstructionYulius Chaesario KurniawanNo ratings yet
- 查重Document9 pages查重李玉博No ratings yet
- Intelligent Robots and Human-Robot Collaboration in The Construction Industry: A ReviewDocument13 pagesIntelligent Robots and Human-Robot Collaboration in The Construction Industry: A ReviewShreeya SNo ratings yet
- Role of Artificial Intelligence in Construction Industry of PakistanDocument27 pagesRole of Artificial Intelligence in Construction Industry of PakistanPoonam KilaniyaNo ratings yet
- COBOT Applications - Recent Advances and ChallengesDocument33 pagesCOBOT Applications - Recent Advances and ChallengesPiyumal SamarathungaNo ratings yet
- MachinesDocument28 pagesMachinesMichieru5No ratings yet
- Safety Science: Mikela Chatzimichailidou, Yue MaDocument18 pagesSafety Science: Mikela Chatzimichailidou, Yue MaFadil MohammedNo ratings yet
- Paper 02 CoBot Intro and SpecsDocument12 pagesPaper 02 CoBot Intro and SpecsJiggaNo ratings yet
- 1 s2.0 S2210670723005413 MainDocument20 pages1 s2.0 S2210670723005413 MainJIRU SUNNo ratings yet
- Automation in Construction: ReviewDocument20 pagesAutomation in Construction: ReviewDieguizNo ratings yet
- 3) 2021 Barriers To Lean Implementation in Engineer To Order Manufacturing With Subsequent Assembly On Site State of The Art and Future DirectionsDocument26 pages3) 2021 Barriers To Lean Implementation in Engineer To Order Manufacturing With Subsequent Assembly On Site State of The Art and Future Directionsİsmet AkyelNo ratings yet
- BIM For Fast-Track Construction Under COVID-19 Circumstances A Comparative Case Study in The African ContextDocument10 pagesBIM For Fast-Track Construction Under COVID-19 Circumstances A Comparative Case Study in The African Contextnadeen essamNo ratings yet
- Buildings 12 02057 v3Document19 pagesBuildings 12 02057 v3Ataré Messias de FreitasNo ratings yet
- 2020 Book of AbstractDocument97 pages2020 Book of AbstractHector LilonNo ratings yet
- Bill of Material and Labour Template For Construction Information ManagementDocument10 pagesBill of Material and Labour Template For Construction Information ManagementEng-Mukhtaar CatooshNo ratings yet
- Systematic Literature Review On Smart Contracts in The Construction Industry: Potentials, Benefits, and ChallengesDocument18 pagesSystematic Literature Review On Smart Contracts in The Construction Industry: Potentials, Benefits, and Challengesagboeze.ucheNo ratings yet
- Hybrid Digital CraftsDocument10 pagesHybrid Digital CraftsJianjia ZhouNo ratings yet
- 1 s2.0 S0360835223003303 MainDocument10 pages1 s2.0 S0360835223003303 MainfoolloveslifeNo ratings yet
- Case Study of Lean Implementation For QualityDocument13 pagesCase Study of Lean Implementation For QualityADEFIOYE AdeniyiNo ratings yet
- Bim Enabled Health Safety Analysis of Cross Laminated Timber Onsite Assembly Process PDFDocument11 pagesBim Enabled Health Safety Analysis of Cross Laminated Timber Onsite Assembly Process PDFAlwanNo ratings yet
- Eng 05 00029Document12 pagesEng 05 00029Brijesh PatelNo ratings yet
- Applied Artificial Intelligence For Predicting C - 2021 - Machine Learning WithDocument15 pagesApplied Artificial Intelligence For Predicting C - 2021 - Machine Learning Withjagath kumaraNo ratings yet
- Building Information Modeling Applications, Challenges and Future DirectionsDocument4 pagesBuilding Information Modeling Applications, Challenges and Future DirectionsAlex ANo ratings yet
- Human-Centric Zero-Defect ManufacturingDocument11 pagesHuman-Centric Zero-Defect ManufacturingAnanda BritoNo ratings yet
- Building Information Modeling (BIM) : A New Paradigm For Quality of Life Within Architectural, Engineering and Construction (AEC) IndustryDocument10 pagesBuilding Information Modeling (BIM) : A New Paradigm For Quality of Life Within Architectural, Engineering and Construction (AEC) IndustrySebastian SalinasNo ratings yet
- The Changing Landscape of Employment A Journey To 2028Document21 pagesThe Changing Landscape of Employment A Journey To 2028jaymursalieNo ratings yet
- Towards The Implementation of Immersive TechnologyDocument15 pagesTowards The Implementation of Immersive TechnologyBiloy GarcioNo ratings yet
- Cobot Programming For Collaborative Industrial Tasks: An OverviewDocument37 pagesCobot Programming For Collaborative Industrial Tasks: An OverviewSayantan RahaNo ratings yet
- Journal of BuildingDocument13 pagesJournal of Buildingkris100% (1)
- The Changing Landscape of Employment A Journey To 2028Document22 pagesThe Changing Landscape of Employment A Journey To 2028jaymursalieNo ratings yet
- Annurev Control 080122 090049Document22 pagesAnnurev Control 080122 090049NanoUrraNo ratings yet
- Implementation of Digital Twins in The Process Industry - A Systematic Literature Review of Enablers and BarriersDocument16 pagesImplementation of Digital Twins in The Process Industry - A Systematic Literature Review of Enablers and BarriersJohnny AlvaradoNo ratings yet
- 1 s2.0 S0166361519309698 MainDocument26 pages1 s2.0 S0166361519309698 Mainrosynanda nfNo ratings yet
- Implementing Modular Integrated Construction in High-Rise High-Density Cities - Perspectives in Hong KongDocument16 pagesImplementing Modular Integrated Construction in High-Rise High-Density Cities - Perspectives in Hong KongivyngxdNo ratings yet
- Literature Review On Trust and Current Construction Industry TrendsDocument8 pagesLiterature Review On Trust and Current Construction Industry TrendsukefbfvkgNo ratings yet
- 10 1016j Matpr 2020 04 900Document5 pages10 1016j Matpr 2020 04 900Ritashree DasguptaNo ratings yet
- Supply Chain Management in Construction and Engineer-To-Order IndustriesDocument9 pagesSupply Chain Management in Construction and Engineer-To-Order IndustriesMuhammad ShoaibNo ratings yet
- Project Leadership and Society: Nils O.E. Olsson, Emrah Arica, Ruth Woods, Javier Alonso MadridDocument10 pagesProject Leadership and Society: Nils O.E. Olsson, Emrah Arica, Ruth Woods, Javier Alonso Madridzhor El hallaouiNo ratings yet
- Additive Manufacturing by Means of Parametric Robot Programming (Construction Robotics) (2020)Document18 pagesAdditive Manufacturing by Means of Parametric Robot Programming (Construction Robotics) (2020)Bora CobanogluNo ratings yet
- BIM in Construction OperationsDocument8 pagesBIM in Construction OperationsKota BalaNo ratings yet
- 16234-Article Text-60126-3-10-20220221Document16 pages16234-Article Text-60126-3-10-20220221dupe2010No ratings yet
- Saccardo ReportDocument43 pagesSaccardo ReportAdam SmithNo ratings yet
- Challenges Facing The Implementation of BIM in IraqDocument10 pagesChallenges Facing The Implementation of BIM in IraqZEYADLUAYRABEEA ALZAIDINo ratings yet
- Application of Artificial Intelligence in The Nigerian BuildingDocument7 pagesApplication of Artificial Intelligence in The Nigerian Buildingkaren.ngai618No ratings yet
- Jurnal 2023 - A Review On Automation and Robotic Technology in Construction IndustryDocument5 pagesJurnal 2023 - A Review On Automation and Robotic Technology in Construction IndustryyulfaNo ratings yet
- Design of A 3D Printed Concrete Bridge by TestingDocument16 pagesDesign of A 3D Printed Concrete Bridge by Testingibrahim hamzaNo ratings yet
- 1 s2.0 S2352710221005842 MainDocument15 pages1 s2.0 S2352710221005842 MainYash ChorariaNo ratings yet
- Augmented Reality in The Construction Industry - Use Cases PDFDocument17 pagesAugmented Reality in The Construction Industry - Use Cases PDFAniruddhNo ratings yet
- Digital Technology For Quality Management in Construction A Review and Future Research DirectionsDocument10 pagesDigital Technology For Quality Management in Construction A Review and Future Research DirectionsJHON ROMMEL ARCAÑONo ratings yet
- C&D BimDocument12 pagesC&D BimRAJAT MURJANINo ratings yet
- A Graph Based Approach For Module Library Development in - 2022 - Computers inDocument13 pagesA Graph Based Approach For Module Library Development in - 2022 - Computers inJavi HaroNo ratings yet
- Digital Twins: How Engineers Can Adopt Them To Enhance PerformancesFrom EverandDigital Twins: How Engineers Can Adopt Them To Enhance PerformancesNo ratings yet
- IoT Streams for Data-Driven Predictive Maintenance and IoT, Edge, and Mobile for Embedded Machine Learning: Second International Workshop, IoT Streams 2020, and First International Workshop, ITEM 2020, Co-located with ECML/PKDD 2020, Ghent, Belgium, September 14-18, 2020, Revised Selected PapersFrom EverandIoT Streams for Data-Driven Predictive Maintenance and IoT, Edge, and Mobile for Embedded Machine Learning: Second International Workshop, IoT Streams 2020, and First International Workshop, ITEM 2020, Co-located with ECML/PKDD 2020, Ghent, Belgium, September 14-18, 2020, Revised Selected PapersNo ratings yet
- Model Updating in Structural Dynamics - A Generalised Reference Basis ApproachDocument16 pagesModel Updating in Structural Dynamics - A Generalised Reference Basis Approachsumatrablackcoffee453No ratings yet
- Lab Report 2Document3 pagesLab Report 2Shah jalalNo ratings yet
- FlySmart+ Administrator Course (Windows) - XG04 - 27032024Document4 pagesFlySmart+ Administrator Course (Windows) - XG04 - 27032024steve yangNo ratings yet
- Assignment Marks: 30: InstructionsDocument2 pagesAssignment Marks: 30: InstructionsbishtamitdipNo ratings yet
- Please DocuSign Youssef ADMISSIONS FORM W ATDocument5 pagesPlease DocuSign Youssef ADMISSIONS FORM W ATyoussefkhalfaoui30No ratings yet
- Humanities SculptureDocument15 pagesHumanities SculpturehungrynomadphNo ratings yet
- 2006 Amc8Document12 pages2006 Amc8Yuhang HeNo ratings yet
- Capital Structure TheoriesDocument9 pagesCapital Structure TheoriesMahesh HadapadNo ratings yet
- Unit 13. Tidy Up!Document10 pagesUnit 13. Tidy Up!Nguyễn Thị Ngọc HuyềnNo ratings yet
- Anchoring BiasDocument2 pagesAnchoring Biassara collinNo ratings yet
- LY Adverbs Combined ListDocument1 pageLY Adverbs Combined ListcarmencrisanNo ratings yet
- Decanal Working Group On Indigenous Teaching and Learning ReportDocument73 pagesDecanal Working Group On Indigenous Teaching and Learning ReportIlya BanaresNo ratings yet
- UNIT-5 ppspNOTESDocument29 pagesUNIT-5 ppspNOTESEverbloom EverbloomNo ratings yet
- The Three Dimensions of Belief Differentiating Religions: Jungguk Cho, Yang LeeDocument5 pagesThe Three Dimensions of Belief Differentiating Religions: Jungguk Cho, Yang LeeMauren NaronaNo ratings yet
- Separation of Powers - WikipediaDocument15 pagesSeparation of Powers - WikipediaSacredly YoursNo ratings yet
- 0000 Mathematica at WWUDocument11 pages0000 Mathematica at WWUWilhelm Richard WagnerNo ratings yet
- Bacc Form 02Document2 pagesBacc Form 02Jeanpaul PorrasNo ratings yet
- American History 2017-10 PDFDocument76 pagesAmerican History 2017-10 PDFCristian OvanisofNo ratings yet
- Risk Management Framework at DCB BankDocument10 pagesRisk Management Framework at DCB BankRavi KumarNo ratings yet
- The Aim of This Essay Is To Critically Analyse IronmanDocument4 pagesThe Aim of This Essay Is To Critically Analyse IronmanAura IonescuNo ratings yet
- Ece 250 Project PortfolioDocument7 pagesEce 250 Project Portfolioapi-511924847No ratings yet
- Course Outline (Seminar in Finance)Document3 pagesCourse Outline (Seminar in Finance)saniaashaheen9No ratings yet
- E Id - Like - To - BeDocument9 pagesE Id - Like - To - BeNatalia IlhanNo ratings yet
- Second SundayDocument6 pagesSecond SundayAlfred LochanNo ratings yet
- Rabe 1 Reviewer 2022 2023Document174 pagesRabe 1 Reviewer 2022 2023Dencel BarramedaNo ratings yet
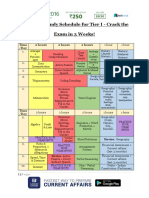
- SSC CHSL Study Schedule For Tier I - Crack The Exam in 3 Weeks!Document3 pagesSSC CHSL Study Schedule For Tier I - Crack The Exam in 3 Weeks!Tushita80% (15)
- Writing Task 2 - Discussion - Opinion EssayDocument7 pagesWriting Task 2 - Discussion - Opinion EssayTonNo ratings yet
- Task Performance EuthenicsDocument3 pagesTask Performance EuthenicsKimberly MarquezNo ratings yet
- Hikaru Ga Chikyuu Ni Itakoro Vol 05Document337 pagesHikaru Ga Chikyuu Ni Itakoro Vol 05Toyss00No ratings yet