You might also like
- Solution Manual For Oracle 12c SQL 3rd Edition CasteelDocument6 pagesSolution Manual For Oracle 12c SQL 3rd Edition CasteelHeatherRobertstwopa100% (35)
- Probability Distributions Summary - Exam PDocument1 pageProbability Distributions Summary - Exam Proy_gettyNo ratings yet
- Boeing 747 - Aerodynamic AnalysisDocument59 pagesBoeing 747 - Aerodynamic AnalysisJeannine Harrison100% (1)
- DIFFERENTTYPESOFWINGLETSANDTHEIRCORRESPONDINGVORTICESDocument23 pagesDIFFERENTTYPESOFWINGLETSANDTHEIRCORRESPONDINGVORTICESqwertyuiopNo ratings yet
- OM Best Practices Guidelines V3.0Document98 pagesOM Best Practices Guidelines V3.0Enrique Balan RomeroNo ratings yet
- 2.1 Introduction To Flight Control SystemsDocument38 pages2.1 Introduction To Flight Control SystemsFanhang ZhangNo ratings yet
- A Matlab Program To Study Gust Loading On A Simple Aircraft ModelDocument83 pagesA Matlab Program To Study Gust Loading On A Simple Aircraft Modelmohammadrezamadadi100% (5)
- Model-Based Wind Estimation For A Hovering VTOL Tailsitter UAVDocument8 pagesModel-Based Wind Estimation For A Hovering VTOL Tailsitter UAVcesarNo ratings yet
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- Angeles, Rea P - Unit 1 - Methods in Teaching Industrial ArtsDocument2 pagesAngeles, Rea P - Unit 1 - Methods in Teaching Industrial ArtsEthel Rose SorianoNo ratings yet
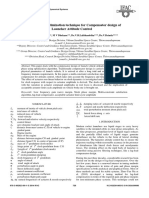
- Application of Optimization Technique For Compensator Design ofDocument8 pagesApplication of Optimization Technique For Compensator Design ofGayathri GnanaiyaNo ratings yet
- Stability Analysis of Longitudinal Dynamics of Hovering Flapping Mavs/InsectsDocument20 pagesStability Analysis of Longitudinal Dynamics of Hovering Flapping Mavs/InsectsAhmed ElsadekNo ratings yet
- 13680-Article Text-23920-1-10-20201008Document10 pages13680-Article Text-23920-1-10-20201008MOHAMMED JAWADNo ratings yet
- Roll Angle Stabilization of Fixed Wing UDocument12 pagesRoll Angle Stabilization of Fixed Wing UАлуа ЕрмековаNo ratings yet
- Measurement and Estimation of The Angle of Attack and The Angle of SideslipDocument6 pagesMeasurement and Estimation of The Angle of Attack and The Angle of SideslipzonadosNo ratings yet
- 2015 - Flight Control Law Design Criteria For The Transition Phase For A Tiltwing Aircraft Using Multi-Objective Parameter SynthesisDocument14 pages2015 - Flight Control Law Design Criteria For The Transition Phase For A Tiltwing Aircraft Using Multi-Objective Parameter Synthesisahmad.yasser123456No ratings yet
- Effect of Airplane Tail Aspect Ratio OnDocument11 pagesEffect of Airplane Tail Aspect Ratio OnMOHAMMED JAWADNo ratings yet
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- HD-ASSR-Kinematic and Aerodynamic Modeling of Flapping Wing Ornithopter-Procedia-2012Document16 pagesHD-ASSR-Kinematic and Aerodynamic Modeling of Flapping Wing Ornithopter-Procedia-2012Deb PradhanNo ratings yet
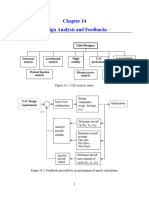
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
- Modeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsDocument26 pagesModeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsMano PrakashNo ratings yet
- 2011 - Design and Wind Tunnel Tests of A Tiltwing UAVDocument11 pages2011 - Design and Wind Tunnel Tests of A Tiltwing UAVahmad.yasser123456No ratings yet
- Aiac 2007 073Document18 pagesAiac 2007 073Mehreen AzamNo ratings yet
- 023 - Chapter 5 - L16 PDFDocument12 pages023 - Chapter 5 - L16 PDFKunhu MonuNo ratings yet
- Aviat Book EnglishDocument24 pagesAviat Book EnglishdaniilNo ratings yet
- Helicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataDocument6 pagesHelicopter Firing-Rocket Performance and Pilot S Workload Evaluation From Flight DataGustavo Rothmund BolfeNo ratings yet
- Uso de DadosDocument16 pagesUso de DadosRodrigoLemesNo ratings yet
- AE 4600 Aircraft Stability & Control: Department of Mechanical & Aerospace EngineeringDocument9 pagesAE 4600 Aircraft Stability & Control: Department of Mechanical & Aerospace Engineeringslimshady_KONo ratings yet
- Article AEAT Vertical TailDocument21 pagesArticle AEAT Vertical TailscribdownloaderpassNo ratings yet
- Kite Engineering With Calculations Guide Sheet 1Document5 pagesKite Engineering With Calculations Guide Sheet 1Rafael AndradeNo ratings yet
- Real-Time Simulation System For UAV Based On Matlab/SimulinkDocument6 pagesReal-Time Simulation System For UAV Based On Matlab/SimulinkEngr Jawad ZakirNo ratings yet
- Lectuers 6-8 (Compatibility Mode)Document34 pagesLectuers 6-8 (Compatibility Mode)minimailNo ratings yet
- Modeling and Implementation of Hexacopter Guidance System Using Fuzzy Logic Control Under Wind DisturbanceDocument6 pagesModeling and Implementation of Hexacopter Guidance System Using Fuzzy Logic Control Under Wind DisturbanceDwi KrizyNo ratings yet
- Ground EffectDocument16 pagesGround Effectngokhoi171203No ratings yet
- Design of A Wing With Bell-Shaped Span-Load Using VLM MethodDocument4 pagesDesign of A Wing With Bell-Shaped Span-Load Using VLM Methodrajesh2709No ratings yet
- National Advisory Committee For Aeronautics: Technical NoteDocument38 pagesNational Advisory Committee For Aeronautics: Technical NoteFilipe PaivaNo ratings yet
- Guidance and Control of Standoff Air-To-surface Carrier VehicleDocument27 pagesGuidance and Control of Standoff Air-To-surface Carrier Vehiclewovaj97072No ratings yet
- Agri-Drone Recoil PDFDocument10 pagesAgri-Drone Recoil PDFChiru knNo ratings yet
- Gourinat 468Document13 pagesGourinat 468Yonghui XUNo ratings yet
- 1-Avion No TripuladoDocument7 pages1-Avion No TripuladoJuan Alejandro Cañas ColoradoNo ratings yet
- Mill inDocument149 pagesMill inMuhammad RizwanNo ratings yet
- Target Geo-Localization Based On Camera Vision Simulation of UAVDocument11 pagesTarget Geo-Localization Based On Camera Vision Simulation of UAVJNo ratings yet
- Articulo Final - Jonathan HolguinoDocument10 pagesArticulo Final - Jonathan HolguinoYash Kumar Singh Jha ae19b016No ratings yet
- Analysis of Emergency Landing Load of Civil Aircraft With Single Main Landing Gear Extended LandingDocument4 pagesAnalysis of Emergency Landing Load of Civil Aircraft With Single Main Landing Gear Extended LandingGuilherme Mazetto TellesNo ratings yet
- 1 s2.0 S0029801823008624 MainDocument20 pages1 s2.0 S0029801823008624 MainSHIVAM KUMAR CHOUDHARYNo ratings yet
- Impact Point Prediction Guidance Based On IterativDocument15 pagesImpact Point Prediction Guidance Based On IterativAleksa TrifkovićNo ratings yet
- Aerodynamic Characteristic of SSTO Vehicle at Low Subsonic SpeedsDocument9 pagesAerodynamic Characteristic of SSTO Vehicle at Low Subsonic SpeedsJohnNo ratings yet
- Calculating Yaw of Repose Spin Drift FULLDocument48 pagesCalculating Yaw of Repose Spin Drift FULLChandan JhaNo ratings yet
- Analysis of Airfoil Flow Pattern Using CFD IJERTCONV6IS14048Document5 pagesAnalysis of Airfoil Flow Pattern Using CFD IJERTCONV6IS14048Vinay KashyapNo ratings yet
- CoefficientOfDrag Report Updated2Document2 pagesCoefficientOfDrag Report Updated2DEVANSH DHRAFANINo ratings yet
- Observer-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehicleDocument6 pagesObserver-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehiclemailtosshettyNo ratings yet
- Mohammed Ahmed Rasheed & Ahmed Adnan AL-QaisyDocument19 pagesMohammed Ahmed Rasheed & Ahmed Adnan AL-QaisyAhmed OmarNo ratings yet
- Mathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerDocument7 pagesMathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerdrenridaNo ratings yet
- Flapping WingDocument31 pagesFlapping Wingnanjappa hebbaleNo ratings yet
- Minimum Unstick Speed Calculation For High-Speed Jet Transport AircraftDocument10 pagesMinimum Unstick Speed Calculation For High-Speed Jet Transport AircraftJonathan TeoNo ratings yet
- The Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelDocument5 pagesThe Whole Trajectory Simulation of Cruise Missile Based On Inertial Navigation Error ModelBohdan MNo ratings yet
- Topik 3 - Geometry of Aerial PhotoDocument52 pagesTopik 3 - Geometry of Aerial PhotoSrivaishnavi VaishuNo ratings yet
- 14 Fixedwingfighteraircraft Flightperformance II 150228115124 Conversion Gate02Document257 pages14 Fixedwingfighteraircraft Flightperformance II 150228115124 Conversion Gate02amrNo ratings yet
- Atmospheric Flight Mechanics: Aircraft PerformanceDocument24 pagesAtmospheric Flight Mechanics: Aircraft PerformancePravallika YadavNo ratings yet
- ICSET 2018 Meti MegayantiDocument6 pagesICSET 2018 Meti MegayantiMeti MegayantiNo ratings yet
- Fotogrametri Udara - 1b. Foto Udara DijitalDocument64 pagesFotogrametri Udara - 1b. Foto Udara DijitalSofyNo ratings yet
- Aerospace Science and Technology: David Serrano, Max Ren, Ahmed Jawad Qureshi, Sina GhaemiDocument14 pagesAerospace Science and Technology: David Serrano, Max Ren, Ahmed Jawad Qureshi, Sina GhaemiImportant Not importantNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- DLL English 8 q4 w5Document6 pagesDLL English 8 q4 w5Rovie SaladoNo ratings yet
- Uponor v. Sioux Chief Mfg.Document5 pagesUponor v. Sioux Chief Mfg.PriorSmartNo ratings yet
- Tie Rod Tieback SystemsDocument12 pagesTie Rod Tieback SystemsHarmandeep BhattiNo ratings yet
- Deadlocks: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument43 pagesDeadlocks: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionmigadNo ratings yet
- Information TechnologyDocument7 pagesInformation TechnologyDEVANAND ANo ratings yet
- Recovery in Credit GrantedDocument21 pagesRecovery in Credit GrantedMaria Ysabella Yee80% (5)
- Social Customer Relationship Management (SCRM) - Application and TechnologyDocument9 pagesSocial Customer Relationship Management (SCRM) - Application and TechnologyThu TrangNo ratings yet
- 10 CodesDocument4 pages10 Codestirso TansoNo ratings yet
- English: Quarter 1 - Module 1Document34 pagesEnglish: Quarter 1 - Module 1Roel MabbayadNo ratings yet
- Vitamins and Minerals Lecture NotesDocument9 pagesVitamins and Minerals Lecture NotesJoymae Olivares Tamayo100% (1)
- Methods of Teaching 1 and 6Document68 pagesMethods of Teaching 1 and 6BUEN, RENZZELLE JOY B.No ratings yet
- Manual Safety SignDocument49 pagesManual Safety SignMuamar DhikriNo ratings yet
- SK 2015 Q PDFDocument4 pagesSK 2015 Q PDFAtlas ErnhardtNo ratings yet
- Application Form Safety Program Pg1Document1 pageApplication Form Safety Program Pg1Mark Jayson GarciaNo ratings yet
- Singtel Annual Report 2023 Higher ResDocument275 pagesSingtel Annual Report 2023 Higher ResJL ChuaNo ratings yet
- Problems - Tax and BSDocument5 pagesProblems - Tax and BSNguyễn Thùy LinhNo ratings yet
- Example 10 58Document104 pagesExample 10 58christian dawitNo ratings yet
- Sephora's Digital Journey: IBS Center For Management ResearchDocument15 pagesSephora's Digital Journey: IBS Center For Management Researchakriti bawaNo ratings yet
- Manual Usuario Hiki User-Manual-5392612Document174 pagesManual Usuario Hiki User-Manual-5392612Rafael MunueraNo ratings yet
- Unit 7 Legal EthicalDocument22 pagesUnit 7 Legal Ethicalapi-462777064No ratings yet
- Cat-Eht Brake New PDFDocument4 pagesCat-Eht Brake New PDFLingaraj Suresh LingaianNo ratings yet
- Aileen Flores Lesson Plan 2021Document8 pagesAileen Flores Lesson Plan 2021Sissay SemblanteNo ratings yet
- STOD-GEN-AED-0000-ME-SPE-0012 - Functional Specification For AGP Booster PumpsDocument14 pagesSTOD-GEN-AED-0000-ME-SPE-0012 - Functional Specification For AGP Booster PumpsAHMED AMIRANo ratings yet
- Rationale of Employee Turnover: An Analysis of Banking Sector in NepalDocument8 pagesRationale of Employee Turnover: An Analysis of Banking Sector in Nepaltempmail5598No ratings yet
- Liquid FuelsDocument8 pagesLiquid FuelsCharles Bonn Kirby MayoNo ratings yet
- Recognia Intraday Trader InfosheetDocument2 pagesRecognia Intraday Trader InfosheetDipesh PawaiyaNo ratings yet