You might also like
- Session 5 - Aircraft Design Process - InternshipDocument14 pagesSession 5 - Aircraft Design Process - InternshipQasim ElectricwalaNo ratings yet
- Advanced UAV Aerodynamics, Flight Stability and Control: Novel Concepts, Theory and ApplicationsFrom EverandAdvanced UAV Aerodynamics, Flight Stability and Control: Novel Concepts, Theory and ApplicationsPascual MarquésRating: 5 out of 5 stars5/5 (1)
- Conceptual Design Structural and Flow AnDocument10 pagesConceptual Design Structural and Flow AnDreamer MakerNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- 35INDocument2 pages35INHarish NayakNo ratings yet
- Aerodynamic Limits On Large Civil Tiltrotor Sizing and EfficiencyDocument15 pagesAerodynamic Limits On Large Civil Tiltrotor Sizing and EfficiencyShobhit SharmaNo ratings yet
- PPtsDocument18 pagesPPtsSheeba Rathina SelviNo ratings yet
- Longitudinal Stability DerivativesDocument14 pagesLongitudinal Stability DerivativesHimanshuNo ratings yet
- Active Control For Blended Wing Body Aircraft - 2011Document18 pagesActive Control For Blended Wing Body Aircraft - 2011Maurizio BernasconiNo ratings yet
- Aircraft Load Untuk Perancangan Struktur RinganDocument113 pagesAircraft Load Untuk Perancangan Struktur RinganHafizh Renanto A.No ratings yet
- Flight Test Validation of The Rq-4 Block 20 Global Hawk Aerodynamic and Propulsive ModelsDocument20 pagesFlight Test Validation of The Rq-4 Block 20 Global Hawk Aerodynamic and Propulsive Modelsj dnNo ratings yet
- 1-Avion No TripuladoDocument7 pages1-Avion No TripuladoJuan Alejandro Cañas ColoradoNo ratings yet
- 57 210Document9 pages57 210SulaimanNo ratings yet
- Aircraft Design ReportDocument95 pagesAircraft Design ReportMayank Agrawal100% (1)
- Eee Dip UavionicsDocument17 pagesEee Dip UavionicsEndilie Yacob SuciptoNo ratings yet
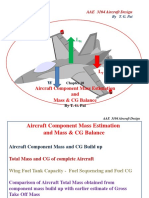
- AAE 3104 CH 10 Aircraft Component Mass Estimation and Mass & CG BalanceDocument44 pagesAAE 3104 CH 10 Aircraft Component Mass Estimation and Mass & CG BalanceDpt HtegnNo ratings yet
- PEGA STOL - Static Longitudinal Stability Analysis ZENAIR CHDocument19 pagesPEGA STOL - Static Longitudinal Stability Analysis ZENAIR CHlaerciofilho100% (1)
- Unmanned Aircraft System (UAS) - Design, Build and Fly ContestDocument26 pagesUnmanned Aircraft System (UAS) - Design, Build and Fly ContestTybuNo ratings yet
- Real-Time Flight Model For Embedded SimulatorDocument10 pagesReal-Time Flight Model For Embedded SimulatorMike StormsNo ratings yet
- GeorgiaTech ThereWillBeBuzzDocument58 pagesGeorgiaTech ThereWillBeBuzzsadeepa sooriyaarachchiNo ratings yet
- Application of Optimization Technique For Compensator Design ofDocument8 pagesApplication of Optimization Technique For Compensator Design ofGayathri GnanaiyaNo ratings yet
- Morphing Wing HALE UAVDocument82 pagesMorphing Wing HALE UAVYoungmin ParkNo ratings yet
- Extended Abstract 83675Document10 pagesExtended Abstract 83675Hoàng ThiếtNo ratings yet
- Modeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsDocument26 pagesModeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsMano PrakashNo ratings yet
- C4Document60 pagesC4Abdulrahman AlbandarNo ratings yet
- Guide Make AirplaneDocument32 pagesGuide Make Airplanenguyen huy phuongNo ratings yet
- 5 - Fuselage Design Version 9-Mar-20Document89 pages5 - Fuselage Design Version 9-Mar-20whatdoedirtNo ratings yet
- Prelimary Design Aircraft Structures V001Document47 pagesPrelimary Design Aircraft Structures V001Vincent MaNo ratings yet
- Development of Vtol Uav With Module For Direction Finding: Kyoung-Moo Min, Foong-Yi Chia & Bong-Hwan KimDocument10 pagesDevelopment of Vtol Uav With Module For Direction Finding: Kyoung-Moo Min, Foong-Yi Chia & Bong-Hwan KimTJPRC PublicationsNo ratings yet
- Choice and Analysis of The Command and Launch Unit Optimal SolutionDocument8 pagesChoice and Analysis of The Command and Launch Unit Optimal SolutionAntonio Pérez AlonsoNo ratings yet
- UAV Course SyllabusDocument3 pagesUAV Course SyllabusKumar kumarapuNo ratings yet
- Flight Stability and Control and Performance Results From The Linear Aerospike SR-71 Experiment (Lasre)Document30 pagesFlight Stability and Control and Performance Results From The Linear Aerospike SR-71 Experiment (Lasre)Kleon TriantafillidisNo ratings yet
- Design of Uav and Mav End-Term PresentationDocument25 pagesDesign of Uav and Mav End-Term PresentationGopesh KrishnaNo ratings yet
- 直升机飞行品质设计方法研究Document95 pages直升机飞行品质设计方法研究zhang junNo ratings yet
- A Systematic Approach For Designing, Analyzing and Building A Model RC PlaneDocument7 pagesA Systematic Approach For Designing, Analyzing and Building A Model RC PlaneHarish MathiazhahanNo ratings yet
- AC DESIGN LAB-I With ValuesDocument64 pagesAC DESIGN LAB-I With ValuesPriyadharshini AnnaduraiNo ratings yet
- Center of GravityDocument21 pagesCenter of GravityRegan FelixNo ratings yet
- Aeromodelling DesignDocument70 pagesAeromodelling DesignMayank AgrawalNo ratings yet
- 100 Seater Aircraft ADP 2Document76 pages100 Seater Aircraft ADP 2Balasastha PNo ratings yet
- Design & Flight Test Result of A Small Scale Hybrid Vtol UavDocument8 pagesDesign & Flight Test Result of A Small Scale Hybrid Vtol UavTJPRC PublicationsNo ratings yet
- Lecture 3 Weight&Balance in AC DesignDocument47 pagesLecture 3 Weight&Balance in AC Designanon_142667448No ratings yet
- List of Abbreviations: Training Publication PMC-39-A0126-AF001-00Document10 pagesList of Abbreviations: Training Publication PMC-39-A0126-AF001-00Alexander Goez100% (1)
- Datcom FighterDocument9 pagesDatcom FightermehtabsondNo ratings yet
- Design and Structural Analysis of Fighter Aircraft's BombDocument12 pagesDesign and Structural Analysis of Fighter Aircraft's BombMauro CantanheideNo ratings yet
- Aircraft Design ProcessDocument40 pagesAircraft Design ProcessIvan GluhenkiyNo ratings yet
- Handling Qualities Optimization For Rotorcraft Conceptual DesignDocument24 pagesHandling Qualities Optimization For Rotorcraft Conceptual DesignAbdul Rashid TajarNo ratings yet
- Lecture 1: Introduction To Flight Dynamics, Stability & ControlDocument33 pagesLecture 1: Introduction To Flight Dynamics, Stability & ControlShirat MohsinNo ratings yet
- ADP 2 Final PDFDocument56 pagesADP 2 Final PDFVeeranjaneyulu Chowdary VajjaNo ratings yet
- By Dr. P K Mohanta and Dr. Y D Dwivedi: Aircraft Performance (AAE011)Document22 pagesBy Dr. P K Mohanta and Dr. Y D Dwivedi: Aircraft Performance (AAE011)Ravi Teja NikhilNo ratings yet
- Paper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Document10 pagesPaper - (JBE) Optimal Tracking Controller Design For A Small Scale Helicopter - A Budiyono, Singgih S Wibowo - 2007Singgih Satrio WibowoNo ratings yet
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- 14 Fixedwingfighteraircraft Flightperformance II 150228115124 Conversion Gate02Document257 pages14 Fixedwingfighteraircraft Flightperformance II 150228115124 Conversion Gate02amrNo ratings yet
- A Matlab Program To Study Gust Loading On A Simple Aircraft ModelDocument83 pagesA Matlab Program To Study Gust Loading On A Simple Aircraft Modelmohammadrezamadadi100% (5)
- Contribution of Wing, Vertical Tail and Fuselage OnDocument14 pagesContribution of Wing, Vertical Tail and Fuselage OnMOHAMMED JAWADNo ratings yet
- Aiaa 2005 6027Document14 pagesAiaa 2005 6027SanteBrucoliNo ratings yet
- CHAPTER 9. Display Systems: 9.1. Situational AwarenessDocument12 pagesCHAPTER 9. Display Systems: 9.1. Situational AwarenessKing KrishnaNo ratings yet
- 400 Seater Passenger AircraftDocument65 pages400 Seater Passenger AircraftSonu Raina MahiNo ratings yet
- Paper FinalDocument7 pagesPaper Finalali rajaNo ratings yet
- Introduction To Flight Control SystemsDocument34 pagesIntroduction To Flight Control SystemsshivaspyNo ratings yet
- A320 CB + ResetsDocument30 pagesA320 CB + ResetsamroushararaNo ratings yet
- Engine Stand TableDocument1 pageEngine Stand TableamroushararaNo ratings yet
- Am 2811 2563 - Rev U1352392661Document54 pagesAm 2811 2563 - Rev U1352392661amroushararaNo ratings yet
- SAFA Course A - B - CDocument257 pagesSAFA Course A - B - CamroushararaNo ratings yet
- Gse VimDocument424 pagesGse VimAbdullah Ahmed Al-Haddad100% (1)
- CFM56-5C Am-2387 - 23881332781490Document23 pagesCFM56-5C Am-2387 - 23881332781490amroushararaNo ratings yet
- Am 2811 2563 - Rev U1352392661Document54 pagesAm 2811 2563 - Rev U1352392661amroushararaNo ratings yet
- AC Checks B777-200Document19 pagesAC Checks B777-200amroushararaNo ratings yet
- PN 181745-4 Cradle PW4090 ManualDocument39 pagesPN 181745-4 Cradle PW4090 ManualamroushararaNo ratings yet
- PW4090 ENGINE STAND PN 180059 Rev D Complete1294939830Document61 pagesPW4090 ENGINE STAND PN 180059 Rev D Complete1294939830amroushararaNo ratings yet
- Ac Checks B737-AlxDocument2 pagesAc Checks B737-AlxamroushararaNo ratings yet
- Ac - Checks Erj 170 (Petro Air)Document3 pagesAc - Checks Erj 170 (Petro Air)amroushararaNo ratings yet
- Ac Checks B777-IraqDocument1 pageAc Checks B777-IraqamroushararaNo ratings yet
- AC - Checks A330-IRAQDocument1 pageAC - Checks A330-IRAQamroushararaNo ratings yet
- AC - Checks A321-231Document14 pagesAC - Checks A321-231amroushararaNo ratings yet
- 11.In-Flight HebrewDocument20 pages11.In-Flight HebrewamroushararaNo ratings yet
- AC - Checks A321-IRAQDocument3 pagesAC - Checks A321-IRAQamroushararaNo ratings yet
- AC - Checks A300-B4Document7 pagesAC - Checks A300-B4amroushararaNo ratings yet
- AC - Checks A330-300Document5 pagesAC - Checks A330-300amroushararaNo ratings yet
- AC - Checks A320-232 SU-GCDDocument4 pagesAC - Checks A320-232 SU-GCDamroushararaNo ratings yet
- AC - Checks A320-232Document16 pagesAC - Checks A320-232amroushararaNo ratings yet
- AC - Checks A300-600Document4 pagesAC - Checks A300-600amroushararaNo ratings yet
- CH 12 FiguresDocument11 pagesCH 12 FiguresamroushararaNo ratings yet
- Delta Airlines A Strategic AnalysisDocument30 pagesDelta Airlines A Strategic AnalysisJohn SmithNo ratings yet
- Cosplay FitnessDocument3 pagesCosplay FitnessamroushararaNo ratings yet
- CH 11 FiguresDocument11 pagesCH 11 FiguresamroushararaNo ratings yet
- CH 10 FiguresDocument11 pagesCH 10 FiguresamroushararaNo ratings yet
- CH 9 FiguresDocument13 pagesCH 9 FiguresamroushararaNo ratings yet
- CH 8 FiguresDocument12 pagesCH 8 FiguresamroushararaNo ratings yet
- Safety Alert - Safe Use of Mobile Elevating WorkingDocument2 pagesSafety Alert - Safe Use of Mobile Elevating Workinghua shiNo ratings yet
- Trailer Parts - Rocket Trailers - Body ComponentsDocument7 pagesTrailer Parts - Rocket Trailers - Body ComponentsRocket TrailersNo ratings yet
- Containerisation in India: Capt. Prakash JoagDocument25 pagesContainerisation in India: Capt. Prakash Joagjohndmariner123No ratings yet
- Eticket: Ernakulam Bangalore Wednesday, June 19, 2019Document3 pagesEticket: Ernakulam Bangalore Wednesday, June 19, 2019Cyril ThomasNo ratings yet
- Windshield Wiper Motor Removal and InstallationDocument3 pagesWindshield Wiper Motor Removal and InstallationMichael HernandezNo ratings yet
- PHÂN TÍCH KẾT QUẢ KHẢO SÁTDocument11 pagesPHÂN TÍCH KẾT QUẢ KHẢO SÁTHải Âu HồNo ratings yet
- Almera Owner Manual EN PDFDocument228 pagesAlmera Owner Manual EN PDFjonathanNo ratings yet
- Iveco Eurocargo Specification PDFDocument22 pagesIveco Eurocargo Specification PDFBogdan StefanNo ratings yet
- Guidance Note: The Design and Construction of Freight WagonsDocument41 pagesGuidance Note: The Design and Construction of Freight WagonsamiedNo ratings yet
- Accessories Brochure 9 AprilDocument2 pagesAccessories Brochure 9 Aprilnagaraj patilNo ratings yet
- Cdi 3 Chapter 5Document17 pagesCdi 3 Chapter 5Gielhene MinearNo ratings yet
- 2008 Mazda CX 9 30168Document506 pages2008 Mazda CX 9 30168psaayo100% (1)
- GPD155-A: Owner'S ManualDocument108 pagesGPD155-A: Owner'S Manualoswaldoec10No ratings yet
- Ohlins DTC Einbauanleitung BM 317 EnglischDocument2 pagesOhlins DTC Einbauanleitung BM 317 Englischtututis7562No ratings yet
- E51 Quick Reference GuideDocument52 pagesE51 Quick Reference Guidedsladden100% (1)
- Aircraft Perf Notes2Document96 pagesAircraft Perf Notes2JFS Jordi100% (1)
- Pages From Irc - Gov.in - sp.088.2010Document4 pagesPages From Irc - Gov.in - sp.088.2010Shuddhashil GhoshNo ratings yet
- L3 - 1 - Hull Production Hierarchy and Block DivisionDocument28 pagesL3 - 1 - Hull Production Hierarchy and Block DivisionAli HanafiNo ratings yet
- MIL ON DTC P1364P1365 Camshaft Position Actuator Lexus Ls 460 2010Document5 pagesMIL ON DTC P1364P1365 Camshaft Position Actuator Lexus Ls 460 2010Sajjad HussainNo ratings yet
- Inter Lacustre BL - Docx3Document2 pagesInter Lacustre BL - Docx3Ntore Quenten AymardNo ratings yet
- SCRIPT 2021 FebreroDocument12 pagesSCRIPT 2021 FebreroJuanNo ratings yet
- 20 Mirage (Eng)Document230 pages20 Mirage (Eng)Ajendam 1 SimindiasahpraNo ratings yet
- Advancement in Technology in Water TransportDocument8 pagesAdvancement in Technology in Water TransportAnkur BansalNo ratings yet
- Kia Ceed ManualDocument7 pagesKia Ceed ManualRomeo RomeoNo ratings yet
- Suspension Citroen Xantia Complete FRDocument140 pagesSuspension Citroen Xantia Complete FRjfkbcn100% (1)
- Changes: De-Icing: This Chart Is A Part of Navigraph Charts and Is Intended For Flight Simulation Use OnlyDocument10 pagesChanges: De-Icing: This Chart Is A Part of Navigraph Charts and Is Intended For Flight Simulation Use OnlydebertNo ratings yet
- STRIA Roadmap - Smart Mobility and ServicesDocument15 pagesSTRIA Roadmap - Smart Mobility and ServicesscribdpgoranNo ratings yet
- 1 Maritime TransportDocument413 pages1 Maritime TransportWondwosen Tiruneh100% (1)
- BH60M BH50M Service Manual - 03-01-2012Document500 pagesBH60M BH50M Service Manual - 03-01-2012Bontor TuaNo ratings yet
- Dayton Street PavingDocument2 pagesDayton Street PavingAnonymous DyzkF1inINo ratings yet