You might also like
- Minor Project Synopsis of Digital Watermarking Using DCT and Genetic AlgorithmDocument6 pagesMinor Project Synopsis of Digital Watermarking Using DCT and Genetic AlgorithmVipul RajputNo ratings yet
- Saudi Arabian Oil Company: Centrifugal Pump Data Sheet For Horizontal Pumps and Vertical In-Line PumpsDocument6 pagesSaudi Arabian Oil Company: Centrifugal Pump Data Sheet For Horizontal Pumps and Vertical In-Line PumpsAnshu K MuhammedNo ratings yet
- Service Manual Repair Parts: Size 03 To 20 Posidyne Clutch/Brake DrivesDocument45 pagesService Manual Repair Parts: Size 03 To 20 Posidyne Clutch/Brake DrivesAnibal RodriguezNo ratings yet
- DDGANDocument28 pagesDDGANPixel DinosaurNo ratings yet
- D V2D: V D D S M: EEP Ideo To Epth With Ifferentiable Tructure From OtionDocument20 pagesD V2D: V D D S M: EEP Ideo To Epth With Ifferentiable Tructure From OtiondocjagNo ratings yet
- Palmprint-Palmvein Fusion Recognition Based On Deep Hashing NetworkDocument12 pagesPalmprint-Palmvein Fusion Recognition Based On Deep Hashing Networktech guruNo ratings yet
- 绿色人工智能:深度学习框架的成本是否不同?Document13 pages绿色人工智能:深度学习框架的成本是否不同?meiwanlanjunNo ratings yet
- S GNN R 3DM P P & B: Imple Egularisation For Olecular Roperty Rediction EyondDocument23 pagesS GNN R 3DM P P & B: Imple Egularisation For Olecular Roperty Rediction EyondYunyang LiNo ratings yet
- LN3Diff: Scalable Latent Neural Fields Diffusion For Speedy 3D GenerationDocument29 pagesLN3Diff: Scalable Latent Neural Fields Diffusion For Speedy 3D Generationxepit98367No ratings yet
- The Good BookDocument10 pagesThe Good BookGeet SharmaNo ratings yet
- Quantized Distributed TrainingDocument32 pagesQuantized Distributed TrainingShrikant KolturNo ratings yet
- 50 Make Smart Decisions Faster Deciding D2D Resource Allocation Via Stackelberg Game Guided Multi Agent Deep Reinforcement LearningDocument12 pages50 Make Smart Decisions Faster Deciding D2D Resource Allocation Via Stackelberg Game Guided Multi Agent Deep Reinforcement LearningfelicitywxxNo ratings yet
- Deep Reinforcement Learning For Unsupervised Video Summarization WithDiversity-Representativeness RewardDocument9 pagesDeep Reinforcement Learning For Unsupervised Video Summarization WithDiversity-Representativeness RewardalyasocialwayNo ratings yet
- Cdtrans Cross-Domain Transformer For Unsupervised Domain AdaptationDocument14 pagesCdtrans Cross-Domain Transformer For Unsupervised Domain AdaptationnilNo ratings yet
- L S Gan T H F N I S: Arge Cale Raining For IGH Idelity Atural Mage YnthesisDocument35 pagesL S Gan T H F N I S: Arge Cale Raining For IGH Idelity Atural Mage YnthesisNguyễn ViệtNo ratings yet
- Realizing A Communication System With Deep Learning.Document36 pagesRealizing A Communication System With Deep Learning.abuNo ratings yet
- Graphsaint: G S B I L M: Raph Ampling Ased Nductive Earning EthodDocument19 pagesGraphsaint: G S B I L M: Raph Ampling Ased Nductive Earning Ethodwenwen XiaNo ratings yet
- Distdgl: Distributed Graph Neural Network Training For Billion-Scale GraphsDocument9 pagesDistdgl: Distributed Graph Neural Network Training For Billion-Scale GraphsAman JalanNo ratings yet
- Pruning Machine LearningDocument93 pagesPruning Machine LearninghapekNo ratings yet
- Knowledge Distillation: A SurveyDocument29 pagesKnowledge Distillation: A Surveybasuthker raviNo ratings yet
- Deep Leakage From GradientsDocument11 pagesDeep Leakage From Gradientsli zihaoNo ratings yet
- Compressing Deep Convolutional NetworksDocument10 pagesCompressing Deep Convolutional NetworksArduino BasicNo ratings yet
- Robust Image Watermarking Based On Generative Adversarial NetworkDocument10 pagesRobust Image Watermarking Based On Generative Adversarial NetworkbamshadpotaNo ratings yet
- Improving Neural Network Quantization Without Retraining Using Outlier Channel SplittingDocument10 pagesImproving Neural Network Quantization Without Retraining Using Outlier Channel SplittingganeshNo ratings yet
- Convolutional Knowledge Graph EmbeddingsDocument8 pagesConvolutional Knowledge Graph Embeddingsphanpeter_492No ratings yet
- Efficient Hybrid Tree-Based Stereo Matching With Applications To Postcapture Image RefocusingDocument15 pagesEfficient Hybrid Tree-Based Stereo Matching With Applications To Postcapture Image RefocusingIsaac AnamanNo ratings yet
- Global-Local Path Networks For Monocular Depth Estimation With Vertical CutdepthDocument11 pagesGlobal-Local Path Networks For Monocular Depth Estimation With Vertical Cutdepthus GPTNo ratings yet
- C N: B - A P H C A: HIP ET Udget Ware Runing With Eaviside Ontinuous PproximationsDocument18 pagesC N: B - A P H C A: HIP ET Udget Ware Runing With Eaviside Ontinuous Pproximations20je0434IshaanChaturvediNo ratings yet
- Deep Learning in Bioinfomatics.Document31 pagesDeep Learning in Bioinfomatics.Kunwar Muhammed SaaimNo ratings yet
- Learning For Learning: Predictive Online Control of Federated Learning With Edge ProvisioningDocument10 pagesLearning For Learning: Predictive Online Control of Federated Learning With Edge ProvisioningAyush Gupta 4-Year B.Tech. Electrical EngineeringNo ratings yet
- Coupled Patch Alignment For Matching Cross-View GaitsDocument16 pagesCoupled Patch Alignment For Matching Cross-View Gaitswenhao zhangNo ratings yet
- Thesis Video WatermarkingDocument6 pagesThesis Video WatermarkingPayToWriteAPaperLubbock100% (4)
- Sarmah and Kulkarni 2018Document25 pagesSarmah and Kulkarni 2018rube nobeNo ratings yet
- Accepted Manuscript: Applied Soft ComputingDocument39 pagesAccepted Manuscript: Applied Soft ComputingAnonymous Gd16J3n7No ratings yet
- Outrageously Large Neural NetworksDocument19 pagesOutrageously Large Neural Networksarun_kejariwalNo ratings yet
- 代表性期刊论文Document20 pages代表性期刊论文zhaoqc418No ratings yet
- CrowdGAN - Identity-Free Interactive Crowd Video Generation and BeyondDocument16 pagesCrowdGAN - Identity-Free Interactive Crowd Video Generation and BeyondmmmmNo ratings yet
- A Semi-Blind Reference Video Watermarking Using: Satyanarayana Murty. P K. Venkatesh Rajesh Kumar. PDocument11 pagesA Semi-Blind Reference Video Watermarking Using: Satyanarayana Murty. P K. Venkatesh Rajesh Kumar. PMaharani MeidyNo ratings yet
- System For Detecting Deepfake in VideosDocument11 pagesSystem For Detecting Deepfake in VideosamiNo ratings yet
- 1810 05997 PDFDocument15 pages1810 05997 PDFBlake XiaoNo ratings yet
- Edge Intelligence: On-Demand Deep Learning Model Co-Inference With Device-Edge SynergyDocument6 pagesEdge Intelligence: On-Demand Deep Learning Model Co-Inference With Device-Edge SynergyMochamad Sandi NofiansyahNo ratings yet
- DSFD: Dual Shot Face DetectorDocument10 pagesDSFD: Dual Shot Face DetectorKalpana SachanNo ratings yet
- 1506 02626 PDFDocument9 pages1506 02626 PDFdakshNo ratings yet
- Qiu Learning Spatio-Temporal Representation ICCV 2017 PaperDocument9 pagesQiu Learning Spatio-Temporal Representation ICCV 2017 Papermjt0207No ratings yet
- Deep Learning With Edge Computing: A ReviewDocument19 pagesDeep Learning With Edge Computing: A ReviewÀs MãNo ratings yet
- DC 10Document7 pagesDC 10samaneh keshavarziNo ratings yet
- Digital Image Watermarking PHD ThesisDocument7 pagesDigital Image Watermarking PHD Thesiskarenalvarezreno100% (1)
- Learning Efficient Convolutional Networks Through Network SlimmingDocument10 pagesLearning Efficient Convolutional Networks Through Network Slimming20je0434IshaanChaturvediNo ratings yet
- Binaryconnect: Training Deep Neural Networks With Binary Weights During PropagationsDocument9 pagesBinaryconnect: Training Deep Neural Networks With Binary Weights During PropagationsChanon TonmaiNo ratings yet
- Knowledge Distillation and Student-Teacher Learning For Visual Intelligence: A Review and New OutlooksDocument40 pagesKnowledge Distillation and Student-Teacher Learning For Visual Intelligence: A Review and New OutlooksRaymon ArnoldNo ratings yet
- Deep Generative Video CompressionDocument15 pagesDeep Generative Video CompressionMoaz AlomaryNo ratings yet
- Deep Reinforcement Learning For Intelligent ReflecDocument5 pagesDeep Reinforcement Learning For Intelligent ReflecSreekrishna DasNo ratings yet
- JNCADocument16 pagesJNCAani72No ratings yet
- Vi TransformerDocument21 pagesVi TransformerAli HaiderNo ratings yet
- Learning To Combine: Knowledge Aggregation For Multi-Source Domain AdaptationDocument19 pagesLearning To Combine: Knowledge Aggregation For Multi-Source Domain AdaptationasdasdNo ratings yet
- Fast CMFD - 2019Document27 pagesFast CMFD - 2019Srilakshmi VNo ratings yet
- Thesis Report On Image CompressionDocument4 pagesThesis Report On Image CompressionHeather Strinden100% (2)
- 1 s2.0 S0925231220303337 MainDocument12 pages1 s2.0 S0925231220303337 MainMaria PilarNo ratings yet
- Sign Language Recognition From Digital Videos Using Feature Pyramid Network With Detection TransformerDocument13 pagesSign Language Recognition From Digital Videos Using Feature Pyramid Network With Detection TransformerMiral ElnakibNo ratings yet
- A New Steganography Algorithm Based On Video Sparse RepresentationDocument26 pagesA New Steganography Algorithm Based On Video Sparse RepresentationesrNo ratings yet
- Embedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingFrom EverandEmbedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingNo ratings yet
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesFrom EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesNo ratings yet
- Software Design and Development HSC NotesDocument77 pagesSoftware Design and Development HSC Notesjermaine jonesNo ratings yet
- FlowLine Level Transmitter Ultrasonic EchoSpan LU80 LU81 LU83 LU84 Data SheetDocument2 pagesFlowLine Level Transmitter Ultrasonic EchoSpan LU80 LU81 LU83 LU84 Data SheetPromagEnviro.comNo ratings yet
- 4 Options To Generate Primary Keys: Generationtype - AutoDocument3 pages4 Options To Generate Primary Keys: Generationtype - AutoAdolfNo ratings yet
- Control Valves Data Sheet: Client: PlantDocument1 pageControl Valves Data Sheet: Client: PlantAnoNo ratings yet
- Science 8-Quarter 2-Lesson 3Document16 pagesScience 8-Quarter 2-Lesson 3Ms. Rhonabelle Llerin PagudNo ratings yet
- Correlation vs. CausationDocument13 pagesCorrelation vs. CausationdanielmugaboNo ratings yet
- Vastu ShastraDocument36 pagesVastu ShastraAnjanaya Lamani0% (1)
- Pac3A Sect 600 EarthworksDocument66 pagesPac3A Sect 600 EarthworksazizuddinNo ratings yet
- Antioxidants - MELROB - RubberDocument6 pagesAntioxidants - MELROB - RubberMarcos ROSSINo ratings yet
- The - Semantics - of - Ryle (Jason Wakefield, University of Cambridge)Document2 pagesThe - Semantics - of - Ryle (Jason Wakefield, University of Cambridge)Jason WakefieldNo ratings yet
- Managerial Accounting DefinitionsDocument15 pagesManagerial Accounting Definitionskamal sahabNo ratings yet
- A 1008 - A 1008M - 04 Qtewmdgvqtewmdhnlvjfra - PDFDocument9 pagesA 1008 - A 1008M - 04 Qtewmdgvqtewmdhnlvjfra - PDFMarcos Verissimo Juca de PaulaNo ratings yet
- ASTM B 280-20 STD Spec For Seamless Copper Tubing For Air Conditioning and Refrigeration Field ServiceDocument9 pagesASTM B 280-20 STD Spec For Seamless Copper Tubing For Air Conditioning and Refrigeration Field Servicetomhansen935No ratings yet
- Bionic ReportDocument11 pagesBionic ReportIgor HorvatNo ratings yet
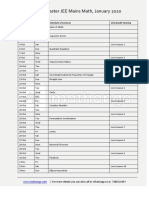
- Schedule 90 Days Jee Main Crash Course MathongoDocument3 pagesSchedule 90 Days Jee Main Crash Course MathongoShrish DollinNo ratings yet
- IINNO Catalogue2012 01 SMART 021112 B PDFDocument25 pagesIINNO Catalogue2012 01 SMART 021112 B PDFmiraijewelsNo ratings yet
- An Electronic Control Unit For Reducing Contact Bounce in Electromagnetic ContactorsDocument10 pagesAn Electronic Control Unit For Reducing Contact Bounce in Electromagnetic ContactorsAbirami RajagopalNo ratings yet
- 24945: FISS 011 - Fisica Experimental II - 005: Coulombs Law SimulationDocument2 pages24945: FISS 011 - Fisica Experimental II - 005: Coulombs Law SimulationAlberto GMNo ratings yet
- Weld Acceptance Criteria1Document1 pageWeld Acceptance Criteria1sankarNo ratings yet
- AT2 ERT Installation GuideDocument3 pagesAT2 ERT Installation GuideYordan Silva GomezNo ratings yet
- 10385-J UTBI-001 ManualDocument2 pages10385-J UTBI-001 ManualMatias GiammariniNo ratings yet
- Dynamic Analysis of Gear Shifting MechanismDocument4 pagesDynamic Analysis of Gear Shifting MechanismMr. S. Thiyagu Asst Prof MECHNo ratings yet
- 05-09-21 JR - Iit Star Co-Sc (Model-B) Jee Adv 2018 (P-I) Wat-18 QPDocument14 pages05-09-21 JR - Iit Star Co-Sc (Model-B) Jee Adv 2018 (P-I) Wat-18 QPIshita Reddy100% (1)
- 878Document47 pages878IulianCiobanuNo ratings yet
- WIND LOADS (Computation of QH For MWFRS, Low Rise BuildingDocument2 pagesWIND LOADS (Computation of QH For MWFRS, Low Rise BuildingRomeo QuerubinNo ratings yet
- T1 SeriesDocument1 pageT1 SeriesFabricio GonçalvesNo ratings yet
- Introduction To DSADocument11 pagesIntroduction To DSAdhiraj1223353No ratings yet
- Pantron Amplifier ISG-N138 DatasheetDocument7 pagesPantron Amplifier ISG-N138 DatasheetlutfirozaqiNo ratings yet