You might also like
- Is 3177-2020Document92 pagesIs 3177-2020pawanbit80% (5)
- CFD Fundamentals Course 2: Dirichlet and Neumann BCsDocument58 pagesCFD Fundamentals Course 2: Dirichlet and Neumann BCsRaquel Velasco100% (1)
- Implementing FDTD TutorialDocument10 pagesImplementing FDTD TutorialrmehfuzNo ratings yet
- Partial Differential Equations NotesDocument13 pagesPartial Differential Equations NotesJoshua LinNo ratings yet
- Box Culvert Without CushionDocument23 pagesBox Culvert Without CushionPrafulla Malla100% (1)
- ExamDocument3 pagesExamMohan BistaNo ratings yet
- RF Theory and Design - Notes SummaryDocument79 pagesRF Theory and Design - Notes SummaryrachnaNo ratings yet
- qftch21 PDFDocument26 pagesqftch21 PDFKamilNo ratings yet
- Implementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsDocument10 pagesImplementation of Level Set Method Based On OpenFOAM For Capturing The Free Interface in in Compressible Fluid FlowsAghajaniNo ratings yet
- Introduction To CFD Basics: Rajesh Bhaskaran Lance CollinsDocument17 pagesIntroduction To CFD Basics: Rajesh Bhaskaran Lance CollinssatwikreddyNo ratings yet
- Finite Difference Modeling of Acoustic Waves in Matlab: XZT T VXZ XZTDocument19 pagesFinite Difference Modeling of Acoustic Waves in Matlab: XZT T VXZ XZTHajar Ben GaraâNo ratings yet
- Finite difference modelling of the full acoustic wave equation in Matlab (REFERENCES)Document9 pagesFinite difference modelling of the full acoustic wave equation in Matlab (REFERENCES)Mikael Yuan EstuariwinarnoNo ratings yet
- Solution of 2D Convection-Diffusion Transient Problems by A Fractional-Step FE MethodDocument11 pagesSolution of 2D Convection-Diffusion Transient Problems by A Fractional-Step FE MethodmazlumNo ratings yet
- Solving PDEs on Surfaces Using Conformal MappingDocument13 pagesSolving PDEs on Surfaces Using Conformal Mappingdr_s_m_afzali8662No ratings yet
- Kechagias Pipiras 2018 MLRD PhaseDocument24 pagesKechagias Pipiras 2018 MLRD PhaseAdis SalkicNo ratings yet
- Cutoff XFEM PaperDocument19 pagesCutoff XFEM PaperFelipe LopesNo ratings yet
- The Control-Volume Finite-Difference Approximation To The Diffusion EquationDocument18 pagesThe Control-Volume Finite-Difference Approximation To The Diffusion EquationMohammed M ZakiNo ratings yet
- Calculus of Several Variables (Serge Lang)Document24 pagesCalculus of Several Variables (Serge Lang)Pablo andres7123No ratings yet
- Strichartz Estimates on Compact ManifoldsDocument17 pagesStrichartz Estimates on Compact Manifoldspipul36No ratings yet
- NotesDocument9 pagesNotesjayashreeNo ratings yet
- Theoretische Physik 2: ElektrodynamikDocument8 pagesTheoretische Physik 2: ElektrodynamikJuan P HDNo ratings yet
- Convergence of TV Regularized SolutionsDocument26 pagesConvergence of TV Regularized Solutionsabde aabilNo ratings yet
- Diffusion of a Gas Through a Membrane ExplainedDocument3 pagesDiffusion of a Gas Through a Membrane ExplainedMiguel Angel Hanco ChoqueNo ratings yet
- Comparison Numerical Fluxes NotesDocument13 pagesComparison Numerical Fluxes NotesRaul Martinez JardonNo ratings yet
- mit8_323_s23_pset02Document6 pagesmit8_323_s23_pset02Ayham ziadNo ratings yet
- Week 5Document14 pagesWeek 5Miriam JomonNo ratings yet
- Vectorized Matlab Codes For Linear Two-DimensionalDocument17 pagesVectorized Matlab Codes For Linear Two-DimensionalAsad AsaadNo ratings yet
- Module 1-Antenna: Retarded Potential, Radiation Field and Power For A Short Dipole AntennaDocument11 pagesModule 1-Antenna: Retarded Potential, Radiation Field and Power For A Short Dipole AntennaRamses Jerez NicurcarNo ratings yet
- 1 s2.0 S0022247X04003105 MainDocument24 pages1 s2.0 S0022247X04003105 MainKritik KumarNo ratings yet
- 1 Exercise: 1-D Heat Conduction With Finite ElementsDocument10 pages1 Exercise: 1-D Heat Conduction With Finite ElementsAhmed Ijaz AbdullaNo ratings yet
- PY 502, Computational Physics, Fall 2018 Numerical Solutions of The SCHR Odinger EquationDocument26 pagesPY 502, Computational Physics, Fall 2018 Numerical Solutions of The SCHR Odinger Equationnagatopein6No ratings yet
- Aikawa 2002Document12 pagesAikawa 2002Emily ThomasNo ratings yet
- Pages From Notes09Document10 pagesPages From Notes09quasemanobrasNo ratings yet
- The Heat and Wave Equations in 2D and 3DDocument39 pagesThe Heat and Wave Equations in 2D and 3DDavid PatricioNo ratings yet
- On The Conformal Anomaly From Higher Derivative Gravity in Ads/Cft CorrespondenceDocument21 pagesOn The Conformal Anomaly From Higher Derivative Gravity in Ads/Cft CorrespondenceGwzthabvo JaimeNo ratings yet
- MembraneDocument15 pagesMembraneKalpit Kamal JainNo ratings yet
- 1D Verification ExamplesDocument12 pages1D Verification ExamplesercNo ratings yet
- Residues and Hodge TheoryDocument23 pagesResidues and Hodge TheoryJimmy Támara AlbinoNo ratings yet
- Project Navier StokesDocument26 pagesProject Navier StokesYves GarnardNo ratings yet
- Determinants, Finite-Difference Operators and Boundary Value ProblemsDocument42 pagesDeterminants, Finite-Difference Operators and Boundary Value ProblemsHam Karim RUPPNo ratings yet
- Random Dopant Fluctuation Modelling With The Impedance Field MethodDocument4 pagesRandom Dopant Fluctuation Modelling With The Impedance Field MethodAllan Roberto MoltoNo ratings yet
- SLE AT2003preprintDocument12 pagesSLE AT2003preprintHuong Cam ThuyNo ratings yet
- Kane Notes LundDocument45 pagesKane Notes LundMushfiq RahmanNo ratings yet
- Chapter 16Document24 pagesChapter 16Pawan NegiNo ratings yet
- Renormalization Group Scaling NotesDocument6 pagesRenormalization Group Scaling NotesJanNo ratings yet
- 4 Numerical Solution of Flow Equations PDFDocument46 pages4 Numerical Solution of Flow Equations PDFJayeshAtreyaNo ratings yet
- Ps 1Document2 pagesPs 1RandomNo ratings yet
- Statistical Mechanics Lecture Notes (2006), L2Document5 pagesStatistical Mechanics Lecture Notes (2006), L2OmegaUserNo ratings yet
- 18.657: Mathematics of Machine Learning: S R LR LK KDocument9 pages18.657: Mathematics of Machine Learning: S R LR LK KBanupriya BalasubramanianNo ratings yet
- 1787-4456-1-PB Magdalena2014Document9 pages1787-4456-1-PB Magdalena2014Lusia KrismiyatiNo ratings yet
- Thin-Layer Method: Formulation in The Time DomainDocument15 pagesThin-Layer Method: Formulation in The Time DomainTarun NaskarNo ratings yet
- Introduction To CFD BasicsDocument21 pagesIntroduction To CFD BasicsNNo ratings yet
- L.Y.M. Gicquel and O. VermorelDocument8 pagesL.Y.M. Gicquel and O. VermorelzamijakaNo ratings yet
- Andreev ReflectionDocument20 pagesAndreev ReflectionEakkarat PattNo ratings yet
- Notes On Vector CalculusDocument10 pagesNotes On Vector CalculusYukiNo ratings yet
- hw2 Sol PDFDocument3 pageshw2 Sol PDFMohan BistaNo ratings yet
- W02 Vector CalculusDocument7 pagesW02 Vector CalculusPruthvi NinganurNo ratings yet
- 2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4Document10 pages2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4chejianglongNo ratings yet
- Generalised Abelian Chern-Simons Theories and Their Connection To Conformal Field TheoriesDocument9 pagesGeneralised Abelian Chern-Simons Theories and Their Connection To Conformal Field Theoriespaoki01No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Piper Seneca II Power ManagerDocument1 pagePiper Seneca II Power ManagerAlejandro0% (1)
- STD 1104 - Welding of Pipelines and Related FacilitiesDocument43 pagesSTD 1104 - Welding of Pipelines and Related FacilitiesDinesh SinghNo ratings yet
- Reviewing For The Final Exam STAT 1350Document4 pagesReviewing For The Final Exam STAT 1350mattNo ratings yet
- Laplace Transformation of Periodic FunctionsDocument15 pagesLaplace Transformation of Periodic FunctionsOlin D'souzaNo ratings yet
- Flexural Behavior of Reinforced Concrete (RC) Beams Retrofitted With Hybrid Fiber Reinforced Polymers (FRPS) Under Sustaining LoadsDocument10 pagesFlexural Behavior of Reinforced Concrete (RC) Beams Retrofitted With Hybrid Fiber Reinforced Polymers (FRPS) Under Sustaining LoadsFurkan IŞIKNo ratings yet
- How Tall A Column in Block Caving 2014-May-2Document11 pagesHow Tall A Column in Block Caving 2014-May-2carlo cerruttiNo ratings yet
- A Modified Hodgkin-Huxley Model To Show The Effect PDFDocument23 pagesA Modified Hodgkin-Huxley Model To Show The Effect PDFjeforand123No ratings yet
- What Is Image Processing?Document5 pagesWhat Is Image Processing?JggNo ratings yet
- Intuitive Intelligence: Accessing The Wisdom of Head, Heart and HaraDocument5 pagesIntuitive Intelligence: Accessing The Wisdom of Head, Heart and HaradNo ratings yet
- Titen HD Heavy-Duty Screw Anchor: FeaturesDocument17 pagesTiten HD Heavy-Duty Screw Anchor: FeaturesmrnaeemNo ratings yet
- 4-Step Authentication Guide To Fender Systems PDFDocument10 pages4-Step Authentication Guide To Fender Systems PDFkaraflassNo ratings yet
- Capacity, PR and RR Test Procedure v2.0Document8 pagesCapacity, PR and RR Test Procedure v2.0Mun Haeng PhonNo ratings yet
- David Reitz - Simulation - Forces and Motion - PhetDocument3 pagesDavid Reitz - Simulation - Forces and Motion - Phetapi-545302422No ratings yet
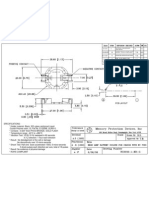
- 10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DDocument1 page10/22/05 B T.B. B.S. 8/11/07 C T.B. B.S. 11/21/07 Dim. 5.30 Was 5.00 T.B. B.S. DyogpanditNo ratings yet
- Identification of Principal Factors Causing UnbalancedDocument6 pagesIdentification of Principal Factors Causing UnbalancedEng Bagaragaza RomualdNo ratings yet
- Granta EduPack Release NotesDocument8 pagesGranta EduPack Release Notes3220355No ratings yet
- Masara mosque-CALCULATION REPORTDocument115 pagesMasara mosque-CALCULATION REPORTmjnasar khan jamalNo ratings yet
- Omar KhayyamDocument19 pagesOmar KhayyamДеан ВеселиновићNo ratings yet
- Basic Reservoir EngineeringDocument74 pagesBasic Reservoir EngineeringRizaldiSaputraNo ratings yet
- Assignment 58583 PDFDocument4 pagesAssignment 58583 PDFesther sulingNo ratings yet
- SADT HT-225A User Manual PDFDocument20 pagesSADT HT-225A User Manual PDFDayane GomesNo ratings yet
- 10 - Fundamentals of Metal Forming (Chapter 14)Document37 pages10 - Fundamentals of Metal Forming (Chapter 14)Taher al suhamiNo ratings yet
- Vickery Watkins 1964 ScrutonNoDocument15 pagesVickery Watkins 1964 ScrutonNoFloydNo ratings yet
- Nucl - Phys.B v.604Document614 pagesNucl - Phys.B v.604buddy72No ratings yet
- Segala Sesuatu Berasal Dari Air-Perspektif ThalesDocument8 pagesSegala Sesuatu Berasal Dari Air-Perspektif ThalesDinda AuliaNo ratings yet
- UntitledDocument6 pagesUntitled龙栊No ratings yet
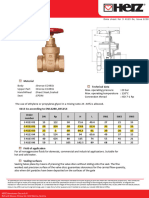
- Herz ValvesDocument11 pagesHerz Valvesat7984582No ratings yet
- Two-Way Flat Slabs: Direct Design MethodDocument26 pagesTwo-Way Flat Slabs: Direct Design MethodYaredo MessiNo ratings yet