You might also like
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- Rapid28i™ PIC Prototyping PCB User ManualDocument5 pagesRapid28i™ PIC Prototyping PCB User ManualPaul WrightNo ratings yet
- DLD Lab#01Document6 pagesDLD Lab#01Zoya KhanNo ratings yet
- IC Block Diagrams & SpecsDocument14 pagesIC Block Diagrams & SpecsChaitanya ParaskarNo ratings yet
- Useri2c v3-1Document11 pagesUseri2c v3-1Devan AntonyNo ratings yet
- Design and ImplementationDocument4 pagesDesign and ImplementationKrste DimitrievskiNo ratings yet
- Mpi Final Report V FinalDocument16 pagesMpi Final Report V FinalAsim AslamNo ratings yet
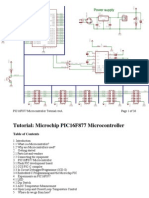
- PIC16F877 Microcontroller TutorialDocument37 pagesPIC16F877 Microcontroller Tutorialmc_prayer100% (4)
- Ti I2cDocument13 pagesTi I2crajkumar_jain4855100% (1)
- Elektor 18F452 Developpement BoardDocument7 pagesElektor 18F452 Developpement BoardAbderrazek YACOUBI100% (2)
- Technical Report for External Display of Doppler Radar GunDocument13 pagesTechnical Report for External Display of Doppler Radar GunkennethNo ratings yet
- PN7462Document108 pagesPN7462edgarjmc25No ratings yet
- Experiment ManualDocument50 pagesExperiment ManualRoberto RilesNo ratings yet
- School of Electrical Engineering: The University of Faisalabad, Faisalabad, PakistanDocument12 pagesSchool of Electrical Engineering: The University of Faisalabad, Faisalabad, PakistanSHAROON SARDAR GHULAMNo ratings yet
- Evaluation Board MCS08DZ60 LQFP32 Learn CAN Bus FeaturesDocument2 pagesEvaluation Board MCS08DZ60 LQFP32 Learn CAN Bus FeaturesWarren O LeddaNo ratings yet
- Ec6711 Emb Lab PDFDocument92 pagesEc6711 Emb Lab PDFAnonymous LXQnmsD100% (1)
- Our Development Board: Product DetailsDocument4 pagesOur Development Board: Product DetailsNabilNo ratings yet
- PROJECT Mislestone 1Document8 pagesPROJECT Mislestone 1Kirankumar ReddyNo ratings yet
- PIC Programming Module USB and Traffic Light System ControllerDocument26 pagesPIC Programming Module USB and Traffic Light System ControllerJosh, LRT100% (1)
- Connecting Xilinx Fpgas To Texas Instruments Ads527X Series AdcsDocument17 pagesConnecting Xilinx Fpgas To Texas Instruments Ads527X Series Adcsamrendra_kNo ratings yet
- PCR2-TWN4: RFID Reader For PORTDocument15 pagesPCR2-TWN4: RFID Reader For PORTMohd Abu AjajNo ratings yet
- FPGA Implementation of A DCDS Processor: 1 The Development BoardDocument12 pagesFPGA Implementation of A DCDS Processor: 1 The Development BoardsergioNo ratings yet
- Project Report 2Document57 pagesProject Report 2brijpatel909No ratings yet
- Design of 12-Bit DAC Using CMOS TechnologyDocument5 pagesDesign of 12-Bit DAC Using CMOS TechnologysanthoshNo ratings yet
- I2C driver design for Linux embedded systemDocument14 pagesI2C driver design for Linux embedded systemParvinder SinghNo ratings yet
- DSP Sp3 ManualDocument51 pagesDSP Sp3 Manualapi-26783388No ratings yet
- Rs485 Click Manual v100Document2 pagesRs485 Click Manual v100Francisco Gutierrez Mojarro100% (1)
- Embedded Lab Manual FinalDocument51 pagesEmbedded Lab Manual FinalFrancis SachinNo ratings yet
- Mangement Intern Training in Visag Steel PlantDocument21 pagesMangement Intern Training in Visag Steel PlantshokilaNo ratings yet
- Lab 4: Keypad and I/O Port Expansions: EEL 4744 - Spring 2012Document5 pagesLab 4: Keypad and I/O Port Expansions: EEL 4744 - Spring 2012Steven SimonNo ratings yet
- PIC 40-Pin Microcontroller Development Board GuideDocument8 pagesPIC 40-Pin Microcontroller Development Board GuideBasit Ahmad100% (3)
- MCES Group ActivityDocument55 pagesMCES Group ActivitykartiksdanNo ratings yet
- EC6711 Embedded Lab Manual FinalDocument51 pagesEC6711 Embedded Lab Manual FinalDr-Eng Imad A. ShaheenNo ratings yet
- EasyDspic4 ManualDocument30 pagesEasyDspic4 ManualPaul Vintimilla TapiaNo ratings yet
- Digital Voltmeter Using PIC MicrocontrollerDocument7 pagesDigital Voltmeter Using PIC MicrocontrollerbecemNo ratings yet
- IC Design & Low Power Techniques ChapterDocument11 pagesIC Design & Low Power Techniques ChapterMohamed AliNo ratings yet
- AX7102_User_ManualDocument57 pagesAX7102_User_ManualPapireddy Maheswar ReddyNo ratings yet
- MicroPIC18F Lite User ManualDocument19 pagesMicroPIC18F Lite User ManualElena Gilbert100% (1)
- Prof. M.SHILPA Assistant Professor Dept. of ISE, BITDocument39 pagesProf. M.SHILPA Assistant Professor Dept. of ISE, BITAditya AryanNo ratings yet
- Railway Gate Control ARDUINODocument21 pagesRailway Gate Control ARDUINOAbdul RazzakNo ratings yet
- Final Doc 2Document49 pagesFinal Doc 2Alekhya Alex100% (1)
- Layout Design of Row Decoder Using CadenceDocument10 pagesLayout Design of Row Decoder Using CadenceIJRASETPublicationsNo ratings yet
- VHDL Tutorial-Part 1-Adc-SpiDocument7 pagesVHDL Tutorial-Part 1-Adc-Spihieuhuech1No ratings yet
- Icd2 DocDocument15 pagesIcd2 Docdag_84No ratings yet
- IOT Assignment Final ReportDocument20 pagesIOT Assignment Final ReportPrathusha ReddyNo ratings yet
- Wireless Keylogger DIY GuideDocument19 pagesWireless Keylogger DIY Guidemarciodias2003No ratings yet
- RS232 Smartcard Reader CircuitDocument6 pagesRS232 Smartcard Reader Circuitmrshare2010No ratings yet
- EDE702 Serial LCD Interface ICDocument9 pagesEDE702 Serial LCD Interface ICJosé ManuelNo ratings yet
- AN5426Document37 pagesAN5426thien dinh baNo ratings yet
- Experiment ManualDocument50 pagesExperiment ManualSanji Daruma50% (6)
- Xilinx XC2C64A-5VQ44C - Wireless Technology - 5G TechnologyDocument4 pagesXilinx XC2C64A-5VQ44C - Wireless Technology - 5G TechnologyjackNo ratings yet
- Digital Electronics LAB ManualDocument61 pagesDigital Electronics LAB ManualKiranmai KonduruNo ratings yet
- De Lab ManualDocument73 pagesDe Lab Manualapi-326771394No ratings yet
- RPM Measurement (Tachometer)Document10 pagesRPM Measurement (Tachometer)19E45A0229 SDESEEENo ratings yet
- Evm 915 25Document9 pagesEvm 915 25Eduardo VargasNo ratings yet
- LC MeterDocument10 pagesLC MeterYenidir TeknoNo ratings yet
- Secure Data Transmission Between Two Pc's Using Zigbee Data TransmissionDocument59 pagesSecure Data Transmission Between Two Pc's Using Zigbee Data TransmissionAnand Cool100% (2)