You might also like
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- SM2648Document13 pagesSM2648Hậu PhạmNo ratings yet
- Datta 2017Document16 pagesDatta 2017Omar Coronado ZuloetaNo ratings yet
- Applied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceDocument14 pagesApplied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceJuan VillacísNo ratings yet
- IntegratedDocument24 pagesIntegratedAbdhul Khadhir ShalayarNo ratings yet
- Integrated Longitudinal and Lateral Networked ContDocument25 pagesIntegrated Longitudinal and Lateral Networked ContJasNo ratings yet
- Traffic Signal Research PaperDocument14 pagesTraffic Signal Research PaperahadabbasadiNo ratings yet
- 1 s2.0 S2046043017300138 MainDocument11 pages1 s2.0 S2046043017300138 MainSema AlhyasatNo ratings yet
- Examining Queue-Jumping Phenomenon in Heterogeneous Traffic Stream at Signalized Intersection Using UAV-based DataDocument16 pagesExamining Queue-Jumping Phenomenon in Heterogeneous Traffic Stream at Signalized Intersection Using UAV-based Datasaurabhh JNo ratings yet
- Velocity Profile Generation For Trajectories of A Self-Driving CARDocument18 pagesVelocity Profile Generation For Trajectories of A Self-Driving CARTJPRC PublicationsNo ratings yet
- Transportation Research Part C: Hend Manasra, Tomer Toledo TDocument12 pagesTransportation Research Part C: Hend Manasra, Tomer Toledo TLAURA SANCHEZ RAMOSNo ratings yet
- An Extended Car-Following Model Considering The Drivers' Characteristics Under A V2V Communication EnvironmentDocument18 pagesAn Extended Car-Following Model Considering The Drivers' Characteristics Under A V2V Communication EnvironmentsafFSNo ratings yet
- A Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised IntersectionDocument20 pagesA Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised Intersection张晗钰No ratings yet
- IET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle DrivingDocument13 pagesIET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle Drivingtensazangetsu691No ratings yet
- Research ArticleDocument14 pagesResearch Articleyoseph dejeneNo ratings yet
- Iv 2012Document7 pagesIv 2012Vikas LakhmaniNo ratings yet
- Research Article: A Multifeatures Spatial-Temporal-Based Neural Network Model For Truck Flow PredictionDocument14 pagesResearch Article: A Multifeatures Spatial-Temporal-Based Neural Network Model For Truck Flow PredictionAntaryami BeheraNo ratings yet
- The Reversible Lane Network Design Problem (RL-NDP) For Smart Cities With Automated TraDocument22 pagesThe Reversible Lane Network Design Problem (RL-NDP) For Smart Cities With Automated TraAsifNawazNo ratings yet
- Composite Platoon Trajectory Planning Strategy For Intersection Throughput MaximizationDocument15 pagesComposite Platoon Trajectory Planning Strategy For Intersection Throughput Maximization张晗钰No ratings yet
- Sustainability 15 01381 v3Document11 pagesSustainability 15 01381 v3Michael Quispe BasilioNo ratings yet
- Traffic Lights Time Strategy For T-Junctions of Toll Road GateDocument10 pagesTraffic Lights Time Strategy For T-Junctions of Toll Road GateIAES International Journal of Robotics and AutomationNo ratings yet
- International Journal of Transportation Science and TechnologyDocument11 pagesInternational Journal of Transportation Science and Technologyanik_kurpNo ratings yet
- Cellular Automata Modelling of MultilaneDocument3 pagesCellular Automata Modelling of MultilaneAmul ShresthaNo ratings yet
- Effect of Vehicle Composition and Delay On Roundabout Capacity Under Mixed Traffic ConditionsDocument8 pagesEffect of Vehicle Composition and Delay On Roundabout Capacity Under Mixed Traffic ConditionsasdNo ratings yet
- Effect of Road Width and Traf Fic Volume On Vehicular Interactions in Heterogeneous Traf FicDocument14 pagesEffect of Road Width and Traf Fic Volume On Vehicular Interactions in Heterogeneous Traf FicRajaSekhararayudu SanaNo ratings yet
- Kinodynamic Motion Planning For Autonomous VehiclesDocument14 pagesKinodynamic Motion Planning For Autonomous VehiclesmaklemzNo ratings yet
- IET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalDocument13 pagesIET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalXia YangNo ratings yet
- Performance Improvement of A Signalized Intersection (A Case Study of New Baneshwor Intersection)Document8 pagesPerformance Improvement of A Signalized Intersection (A Case Study of New Baneshwor Intersection)Sakar ShresthaNo ratings yet
- Traffic Queueing Jockey Simulation Dictation Model On Horizontal Curves Using Generative Adversarial NetworksDocument17 pagesTraffic Queueing Jockey Simulation Dictation Model On Horizontal Curves Using Generative Adversarial NetworksAnyin PeterNo ratings yet
- Transportation ModelsDocument65 pagesTransportation ModelsAnas R. Abu KashefNo ratings yet
- Analysis of Occupation Time of Vehicles at Urban Unsignalized Intersections in Non-Lane-Based Mixed Traffic ConditionsDocument11 pagesAnalysis of Occupation Time of Vehicles at Urban Unsignalized Intersections in Non-Lane-Based Mixed Traffic ConditionsRaisa CacaNo ratings yet
- E3sconf Gcee2023 01004Document8 pagesE3sconf Gcee2023 01004REMYA Y.KNo ratings yet
- A Dynamic Trajectory Planning MethodDocument17 pagesA Dynamic Trajectory Planning Methodgo.thanachotstNo ratings yet
- 1 s2.0 S0045790622006863 MainDocument15 pages1 s2.0 S0045790622006863 Mainroi.ho2706No ratings yet
- Final ManuscriptDocument20 pagesFinal ManuscriptDharnish Raja.JNo ratings yet
- Smart Intersection Design For Traffic Pedestrian ADocument7 pagesSmart Intersection Design For Traffic Pedestrian AVi'ren BoharaNo ratings yet
- 42 Firb (EWGT2006)Document15 pages42 Firb (EWGT2006)guido gentileNo ratings yet
- Research Article: Simulation-Based Planning and Control of Transport Flows in Port Logistic SystemsDocument13 pagesResearch Article: Simulation-Based Planning and Control of Transport Flows in Port Logistic SystemsBee ThymeNo ratings yet
- Sustainability 10 01381 PDFDocument13 pagesSustainability 10 01381 PDFJuanCarlosCarrilloNo ratings yet
- Zhao 2014Document21 pagesZhao 2014Michael Quispe BasilioNo ratings yet
- 1 s2.0 S1877042813023458 MainDocument10 pages1 s2.0 S1877042813023458 MainMary Anne SiegaNo ratings yet
- Fagnant Kockelman2018 Article DynamicRide SharingAndFleetSizDocument16 pagesFagnant Kockelman2018 Article DynamicRide SharingAndFleetSizabkhaledNo ratings yet
- The Impact of Automated Vehicles On Traffic Flow and Road Capacity On Urban Road NetworksDocument10 pagesThe Impact of Automated Vehicles On Traffic Flow and Road Capacity On Urban Road Networkswomen 16No ratings yet
- Autonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control ApproachDocument16 pagesAutonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control Approachthanhtan_tvuNo ratings yet
- Calibration of Macroscopic Traffic Flow Model For Nepalese RoadsDocument8 pagesCalibration of Macroscopic Traffic Flow Model For Nepalese RoadsHemant TiwariNo ratings yet
- AlgorithmdmtrixDocument29 pagesAlgorithmdmtrixVNo ratings yet
- Single-Track Train Timetabling With Guaranteed Optimality: Branch-And-Bound Algorithms With Enhanced Lower BoundsDocument22 pagesSingle-Track Train Timetabling With Guaranteed Optimality: Branch-And-Bound Algorithms With Enhanced Lower Boundsjohn brownNo ratings yet
- Heyns Method (2012)Document15 pagesHeyns Method (2012)David Esteban Meneses RendicNo ratings yet
- tmpDD23 TMPDocument10 pagestmpDD23 TMPFrontiersNo ratings yet
- CTRG-2023 Paper 243Document15 pagesCTRG-2023 Paper 243Satyajit MondalNo ratings yet
- Integrating Ridesharing Services With Automated Vehicles Into Macroscopic Travel Demand ModelsDocument8 pagesIntegrating Ridesharing Services With Automated Vehicles Into Macroscopic Travel Demand ModelsabkhaledNo ratings yet
- Infrastructures 06 00046 v2Document26 pagesInfrastructures 06 00046 v2Zainab A. AbdulstaarNo ratings yet
- Estimation of Average Space Headway Under Heterogeneous Traffic ConditionsDocument5 pagesEstimation of Average Space Headway Under Heterogeneous Traffic Conditionsangelica butonNo ratings yet
- Improving The Performance of Single-Intersection Urban Traffic Networks Based On A Model Predictive ControllerDocument16 pagesImproving The Performance of Single-Intersection Urban Traffic Networks Based On A Model Predictive ControllerRamprasath JayabalanNo ratings yet
- Chapter 01Document5 pagesChapter 01Iqra GantengNo ratings yet
- S2 201700035 Fierek Sawicki Ver2Document12 pagesS2 201700035 Fierek Sawicki Ver2Szymon FierekNo ratings yet
- Rebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachDocument7 pagesRebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachSayani MandalNo ratings yet
- Shared Clean Mobility Operations For First-Mile AnDocument14 pagesShared Clean Mobility Operations For First-Mile AnsarmaNo ratings yet
- Analysis of Delay and Queue Length Variation at Three-Leg Signalized Intersection Under Mixed Traffic ConditionDocument11 pagesAnalysis of Delay and Queue Length Variation at Three-Leg Signalized Intersection Under Mixed Traffic ConditionMohammed ArshadNo ratings yet
- Development of A Theoretical Delay Model For HeterDocument20 pagesDevelopment of A Theoretical Delay Model For HeterAmul ShresthaNo ratings yet
- Intro To CFD Course DetailsDocument1 pageIntro To CFD Course Detailsmaheshj90No ratings yet
- Advance Image Runner 6075Document96 pagesAdvance Image Runner 6075vishwajitNo ratings yet
- Hotpoint-Ariston ARMXXD 129 (EU) Washer-DryerDocument60 pagesHotpoint-Ariston ARMXXD 129 (EU) Washer-DryerAdrian Iulian VladNo ratings yet
- FT-4XR/FT-4XE FT-4VR/FT-4VE Technical Supplement: Vhf/Uhf Dual Band FM Transceiver VHF FM TransceiverDocument16 pagesFT-4XR/FT-4XE FT-4VR/FT-4VE Technical Supplement: Vhf/Uhf Dual Band FM Transceiver VHF FM TransceiverdenisNo ratings yet
- 1975 SC-16 RCA Solid-State Devices Manual-CompressedDocument756 pages1975 SC-16 RCA Solid-State Devices Manual-CompressedHumberto Wesley100% (2)
- 1ST Quarterly Exam in MATH 10Document2 pages1ST Quarterly Exam in MATH 10Mariel PastoleroNo ratings yet
- Jaffe and Zunger Anion DisplacementDocument4 pagesJaffe and Zunger Anion DisplacementmailreethuNo ratings yet
- Intelligent Electronic DeviceDocument17 pagesIntelligent Electronic Devicesandeep_chauhan3770100% (1)
- CAS-CP (Gen. Ed.) MPRO (Excursions in Algebra & Trigonometry)Document72 pagesCAS-CP (Gen. Ed.) MPRO (Excursions in Algebra & Trigonometry)Natalie Sepulveda DibdibNo ratings yet
- MouldDocument16 pagesMouldetamil87No ratings yet
- Black DSP SchematicDocument289 pagesBlack DSP SchematicS Rizwan HaiderNo ratings yet
- Mock Test-4Document19 pagesMock Test-4Bhavish ParkalaNo ratings yet
- SIM4ME FNP1111 AdministratorGuideDocument39 pagesSIM4ME FNP1111 AdministratorGuideAlexanderNo ratings yet
- Iit Jee 2011 Paper-2 FiitjeeDocument24 pagesIit Jee 2011 Paper-2 Fiitjeetanmay100No ratings yet
- Rabindranath Though On ScienceDocument9 pagesRabindranath Though On ScienceMatiyar Rahaman KhanNo ratings yet
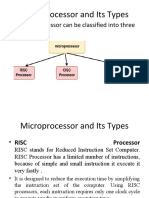
- Microprocessor and Its TypesDocument16 pagesMicroprocessor and Its TypesAisha SarinNo ratings yet
- Forces Worksheet #4 - Newton's Laws Problems: FrictionDocument2 pagesForces Worksheet #4 - Newton's Laws Problems: FrictionSTEVEN ST ANGELNo ratings yet
- Microsoft Word Tips and Tricks To Increase ProductivityDocument16 pagesMicrosoft Word Tips and Tricks To Increase ProductivitySams RajaNo ratings yet
- Risk and ReturnDocument19 pagesRisk and ReturnRaju SainiNo ratings yet
- Elitmus Syllabus FGVF& Paper Pattern - 2015Document8 pagesElitmus Syllabus FGVF& Paper Pattern - 2015Ajit KumarNo ratings yet
- Mit8 044s13 FinalDocument8 pagesMit8 044s13 Final*83*22*No ratings yet
- BusStat W02 Hypothesis TestDocument18 pagesBusStat W02 Hypothesis TestStevie SeanNo ratings yet
- A Case StudyDocument10 pagesA Case StudynourooziNo ratings yet
- Product CatalogueDocument24 pagesProduct Cataloguerupa thakkarNo ratings yet
- Decision Theory Tutorial 1Document13 pagesDecision Theory Tutorial 1JakubNo ratings yet
- ADP3205 AnalogDevicesDocument24 pagesADP3205 AnalogDevicesIlton GomesNo ratings yet
- Design of Open Newel Stair Case With Quarter Space Landing: LoadsDocument4 pagesDesign of Open Newel Stair Case With Quarter Space Landing: LoadsD SRINIVASNo ratings yet
- Proximate Analysis of CoalDocument2 pagesProximate Analysis of CoalManna PintoNo ratings yet
- Project ManagementDocument37 pagesProject ManagementKiran MittalNo ratings yet
- Mass Transfer, PDFDocument7 pagesMass Transfer, PDFFarah AninNo ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)From EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Rating: 5 out of 5 stars5/5 (2)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Autodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)From EverandAutodesk Fusion 360 Black Book (V 2.0.6508) Part 2: Autodesk Fusion 360 Black Book (V 2.0.6508)No ratings yet
- Designing SCADA Application Software: A Practical ApproachFrom EverandDesigning SCADA Application Software: A Practical ApproachNo ratings yet
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- The Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsFrom EverandThe Geometrical Tolerancing Desk Reference: Creating and Interpreting ISO Standard Technical DrawingsRating: 4.5 out of 5 stars4.5/5 (10)