You might also like
- Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignFrom EverandTerramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignRating: 5 out of 5 stars5/5 (1)
- Anti-Con Ict AGV Path Planning in Automated Container Terminals Based On Multi-Agent Reinforcement LearningDocument18 pagesAnti-Con Ict AGV Path Planning in Automated Container Terminals Based On Multi-Agent Reinforcement LearningHậu PhạmNo ratings yet
- A Dynamic Trajectory Planning MethodDocument17 pagesA Dynamic Trajectory Planning Methodgo.thanachotstNo ratings yet
- SM2648Document13 pagesSM2648Hậu PhạmNo ratings yet
- Development of A New Integrated Local Trajectory Planning and Tracking Control Framework For Autonomous Ground VehiclesDocument20 pagesDevelopment of A New Integrated Local Trajectory Planning and Tracking Control Framework For Autonomous Ground Vehicles段星星No ratings yet
- IntegratedDocument24 pagesIntegratedAbdhul Khadhir ShalayarNo ratings yet
- 1 s2.0 S0360835218304777 MainDocument12 pages1 s2.0 S0360835218304777 Mainroi.ho2706No ratings yet
- Application of DEA To The Analysis of AGV Fleet Operations in A Port Container Terminal - ScienceDirectDocument10 pagesApplication of DEA To The Analysis of AGV Fleet Operations in A Port Container Terminal - ScienceDirectHo Van RoiNo ratings yet
- Wevj 14 00172Document18 pagesWevj 14 00172Jelena KilićNo ratings yet
- A Model Based Path Planning Algorithm For Self-Driving Cars in Dynamic EnvironmentDocument6 pagesA Model Based Path Planning Algorithm For Self-Driving Cars in Dynamic EnvironmentSiddharth UNo ratings yet
- A Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised IntersectionDocument20 pagesA Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised Intersection张晗钰No ratings yet
- Sensors: A Hybrid Planning Approach Based On MPC and Parametric Curves For Overtaking ManeuversDocument19 pagesSensors: A Hybrid Planning Approach Based On MPC and Parametric Curves For Overtaking ManeuversrayNo ratings yet
- 1 s2.0 S2666546821000641 MainDocument9 pages1 s2.0 S2666546821000641 MainSidharth MaheshNo ratings yet
- Real-Time Motion Planner with Trajectory OptimizationDocument7 pagesReal-Time Motion Planner with Trajectory Optimizationabbas boumenjelNo ratings yet
- Electronics 09 01277 v2Document19 pagesElectronics 09 01277 v2Thinh HoangNo ratings yet
- A Two-Stage Optimization Method For Schedule and Trajectory of CAVs at An Isolated Autonomous IntersectionDocument43 pagesA Two-Stage Optimization Method For Schedule and Trajectory of CAVs at An Isolated Autonomous IntersectionmfekuncrNo ratings yet
- Traffic Signal Research PaperDocument14 pagesTraffic Signal Research PaperahadabbasadiNo ratings yet
- Sensors 22 07501Document14 pagesSensors 22 07501omar aliNo ratings yet
- Estimation and Control of An Automated Guided VehiDocument17 pagesEstimation and Control of An Automated Guided VehiKhang NghiemNo ratings yet
- Automated Guided Vehicle SystemsDocument11 pagesAutomated Guided Vehicle SystemsAkshay bypNo ratings yet
- Fleet Monitoring Using Sensors in Passing VehiclesDocument10 pagesFleet Monitoring Using Sensors in Passing VehiclesNqtmquin NtqmquinNo ratings yet
- IET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle DrivingDocument13 pagesIET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle Drivingtensazangetsu691No ratings yet
- Applied SciencesDocument17 pagesApplied SciencesNicolas Rojas BarriosNo ratings yet
- Robust Model Predictive Control For Path TrackingDocument9 pagesRobust Model Predictive Control For Path Trackingconfess msritNo ratings yet
- Cooperative Driving of Automated Vehicles Using B-Splines for Trajectory PlanningDocument11 pagesCooperative Driving of Automated Vehicles Using B-Splines for Trajectory PlanningMostafa GhajarNo ratings yet
- A Lane Merge Coordination Model For A V2X Scenario: Luis Sequeira, Adam Szefer, Jamie Slome and Toktam MahmoodiDocument6 pagesA Lane Merge Coordination Model For A V2X Scenario: Luis Sequeira, Adam Szefer, Jamie Slome and Toktam Mahmoodiمصعب جاسمNo ratings yet
- A Hybrid Algorithm For Routing Optimization of AGVs With Multi-Task AssignmentDocument7 pagesA Hybrid Algorithm For Routing Optimization of AGVs With Multi-Task AssignmentLeonardo LoretiNo ratings yet
- Optimal Design of Container Terminal Layout: 1 Background and MotivationDocument11 pagesOptimal Design of Container Terminal Layout: 1 Background and MotivationIrving Ruiz EspinozaNo ratings yet
- Smooth Obstacle Avoidance Path Planning For Autonomous VehiclesDocument6 pagesSmooth Obstacle Avoidance Path Planning For Autonomous VehiclesRubénGómezGómezNo ratings yet
- Optimal Design of Container Terminal LayoutDocument12 pagesOptimal Design of Container Terminal LayoutHậu PhạmNo ratings yet
- Research Article: A Multifeatures Spatial-Temporal-Based Neural Network Model For Truck Flow PredictionDocument14 pagesResearch Article: A Multifeatures Spatial-Temporal-Based Neural Network Model For Truck Flow PredictionAntaryami BeheraNo ratings yet
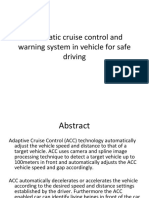
- Automatic Cruise ControlDocument16 pagesAutomatic Cruise ControlSiva SakthivelNo ratings yet
- Agarwal and Lammel 2015Document6 pagesAgarwal and Lammel 2015Jaikishan DamaniNo ratings yet
- Nonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesDocument6 pagesNonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesasadjadiNo ratings yet
- Digital-Twin-Driven AGV Scheduling and Routing inDocument25 pagesDigital-Twin-Driven AGV Scheduling and Routing inHậu PhạmNo ratings yet
- A Dynamic Lane-Changing Trajectory Planning Model For AutomatedDocument20 pagesA Dynamic Lane-Changing Trajectory Planning Model For Automatedgo.thanachotstNo ratings yet
- vehicles-06-00027-v2Document21 pagesvehicles-06-00027-v2jamel-shamsNo ratings yet
- Completion of Collision Avoidance Control Algorithm For Multicopters Based On Geometrical ConstraintsDocument17 pagesCompletion of Collision Avoidance Control Algorithm For Multicopters Based On Geometrical ConstraintsAtiso OtisaNo ratings yet
- Control and Path Prediction of An Automate Guided VehicleDocument17 pagesControl and Path Prediction of An Automate Guided VehicleHo Van RoiNo ratings yet
- An Energy Efficient Hierarchical Algorithm - 2023 - International Journal of NaDocument14 pagesAn Energy Efficient Hierarchical Algorithm - 2023 - International Journal of Naadriana pNo ratings yet
- System Design and Optimization of In-Route Wireless Charging Infrastructure For Shared Automated Electric VehiclesDocument12 pagesSystem Design and Optimization of In-Route Wireless Charging Infrastructure For Shared Automated Electric Vehiclesluis miguel betancur palacioNo ratings yet
- 1 s2.0 S0968090X23001808 MainDocument23 pages1 s2.0 S0968090X23001808 MainOnat KeskinNo ratings yet
- Using Arena For Simulation of Pedestrian Crossing in Roundabout AreasDocument8 pagesUsing Arena For Simulation of Pedestrian Crossing in Roundabout AreasashlyduartNo ratings yet
- science.Document23 pagesscience.Diego Alexander Ortiz AsprillaNo ratings yet
- Collision Avoidence For Vehicle Following PDFDocument12 pagesCollision Avoidence For Vehicle Following PDFsuviryNo ratings yet
- Dynamic resource reservation prevents collisions and deadlocks for multiple AGVsDocument12 pagesDynamic resource reservation prevents collisions and deadlocks for multiple AGVsIchiware StoreNo ratings yet
- Mathematics 10 04575 With CoverDocument20 pagesMathematics 10 04575 With CoverFay NandaNo ratings yet
- Research Article: Research On Local Dynamic Path Planning Method For Intelligent Vehicle Lane-ChangingDocument11 pagesResearch Article: Research On Local Dynamic Path Planning Method For Intelligent Vehicle Lane-Changingmmorad aamraouyNo ratings yet
- Task Offloading Based On Lyapunov Optimization For Mecassisted Vehicular Platooning Networkssensors SwitzerlandDocument15 pagesTask Offloading Based On Lyapunov Optimization For Mecassisted Vehicular Platooning Networkssensors SwitzerlandlaeeeqNo ratings yet
- Annual Reviews in Control: Yanbo Zhao, Petros IoannouDocument9 pagesAnnual Reviews in Control: Yanbo Zhao, Petros IoannouBriiansiitho PonceNo ratings yet
- Integrated Longitudinal and Lateral Networked ContDocument25 pagesIntegrated Longitudinal and Lateral Networked ContJasNo ratings yet
- Research Article: Simulation-Based Planning and Control of Transport Flows in Port Logistic SystemsDocument13 pagesResearch Article: Simulation-Based Planning and Control of Transport Flows in Port Logistic SystemsBee ThymeNo ratings yet
- Multiple-Phase Train Trajectory Optimization With Signalling and Operational ConstraintsDocument21 pagesMultiple-Phase Train Trajectory Optimization With Signalling and Operational ConstraintsAryorespati Xavier SastrowardoyoNo ratings yet
- Journal of Sound and Vibration: Boyu Zhao, Tomonori Nagayama, Kai XueDocument26 pagesJournal of Sound and Vibration: Boyu Zhao, Tomonori Nagayama, Kai XueSteve LegrandNo ratings yet
- Stochastic Route Planning For Electric VehiclesDocument17 pagesStochastic Route Planning For Electric VehiclespartyindacityNo ratings yet
- Neurocomputing: Zhigang Ren, Jialun Lai, Zongze Wu, Shengli XieDocument16 pagesNeurocomputing: Zhigang Ren, Jialun Lai, Zongze Wu, Shengli XieAkshay bypNo ratings yet
- Autonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control ApproachDocument16 pagesAutonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control Approachthanhtan_tvuNo ratings yet
- Game theoretic approach for predictive lane-changing and car-following controlDocument20 pagesGame theoretic approach for predictive lane-changing and car-following controlMauro TorresNo ratings yet
- A Steering Assist Control System in Curve Road Using Car-To-Car CommunicationDocument8 pagesA Steering Assist Control System in Curve Road Using Car-To-Car CommunicationSELVAKUMAR RNo ratings yet
- Transportation Engineering: Josue Ortega, Henrietta Lengyel, Zsolt SzalayDocument10 pagesTransportation Engineering: Josue Ortega, Henrietta Lengyel, Zsolt SzalayrishuNo ratings yet
- QQL - s41598 023 30990 5Document10 pagesQQL - s41598 023 30990 5roi.ho2706No ratings yet
- QQL NS 2019012315280690Document9 pagesQQL NS 2019012315280690roi.ho2706No ratings yet
- QPOL Yao20aDocument32 pagesQPOL Yao20aroi.ho2706No ratings yet
- QPOL Meyer23aDocument22 pagesQPOL Meyer23aroi.ho2706No ratings yet
- 1 s2.0 S0360835223001730 MainDocument19 pages1 s2.0 S0360835223001730 Mainroi.ho2706No ratings yet
- Resume AlexDocument2 pagesResume AlexAlexandru JercaianuNo ratings yet
- CSC 203 Week 1-3Document22 pagesCSC 203 Week 1-3seyiNo ratings yet
- Java program to read ages and display eldest and youngestDocument36 pagesJava program to read ages and display eldest and youngestMayur Jondhale MJNo ratings yet
- GATE Operating System BookDocument12 pagesGATE Operating System BookMims120% (1)
- Scheduling Resources and Costs: Chapter EightDocument15 pagesScheduling Resources and Costs: Chapter EightArnór Scribd JónssonNo ratings yet
- Cs604 Final Term Solved MCQs With ReferenceDocument16 pagesCs604 Final Term Solved MCQs With Referenceaiman razzaqNo ratings yet
- assignment2_TLB_HK241Document20 pagesassignment2_TLB_HK241levodangkhoatg2No ratings yet
- Aspen Planning and Scheduling SeminarDocument49 pagesAspen Planning and Scheduling SeminarGoutam Giri100% (2)
- Operating System FundamentalsDocument109 pagesOperating System FundamentalsGuruKPO100% (3)
- Thread Is One of The Important Concepts in AndroidDocument10 pagesThread Is One of The Important Concepts in AndroidTedla MelekotNo ratings yet
- An Improved Min-Min Task Scheduling Algorithm For Load Balancing in Cloud ComputingDocument5 pagesAn Improved Min-Min Task Scheduling Algorithm For Load Balancing in Cloud ComputingEditor IJRITCCNo ratings yet
- 05-27 RtsaDocument134 pages05-27 Rtsavijaykumar ponugotiNo ratings yet
- Oracle Database 10g: New Features For Administrators: D17079GC21 Edition 2.1 October 2005 D22244Document18 pagesOracle Database 10g: New Features For Administrators: D17079GC21 Edition 2.1 October 2005 D22244Rapid ChaseNo ratings yet
- Chapter 10Document45 pagesChapter 10Sarita SamalNo ratings yet
- Chapter 1: Introduction: Muhammad Zeshan Qurashi Fuuast, Islamabad Spring, 2020Document77 pagesChapter 1: Introduction: Muhammad Zeshan Qurashi Fuuast, Islamabad Spring, 2020Zee ShanNo ratings yet
- System & Network Performance Tuning: Hal SternDocument184 pagesSystem & Network Performance Tuning: Hal Sternsavio77No ratings yet
- GM Interface Monitoring and Error Handling (Early Draft)Document34 pagesGM Interface Monitoring and Error Handling (Early Draft)Aline Graziella Staub KleinNo ratings yet
- Parallel Processing - OpenfoamDocument44 pagesParallel Processing - Openfoamsuresh_501No ratings yet
- Linux PresentationDocument77 pagesLinux PresentationssanagavNo ratings yet
- COMP313 W1 2016 - Test One: UNIXDocument2 pagesCOMP313 W1 2016 - Test One: UNIXsarrruwvbeopruerxfNo ratings yet
- Processes: An Introduction to Process Management in Operating SystemsDocument24 pagesProcesses: An Introduction to Process Management in Operating SystemsGaytri DhingraNo ratings yet
- Dfs NotesDocument69 pagesDfs NotesDhiraj ThakkarNo ratings yet
- Operating System ToolsDocument4 pagesOperating System ToolsShivansh tomarNo ratings yet
- Cpu Scheduling Assignment-Cs 303Document8 pagesCpu Scheduling Assignment-Cs 303nimeshaNo ratings yet
- PP Configuration IMG PathDocument7 pagesPP Configuration IMG PathAngela SmithNo ratings yet
- Peoplesoft Tuning PDFDocument40 pagesPeoplesoft Tuning PDFKrishna EatiNo ratings yet
- 2nd Session Unit III 1Document26 pages2nd Session Unit III 1balakrishnaNo ratings yet
- Os ChoDocument8 pagesOs ChoTARANGITNo ratings yet
- Rtos ComparisonDocument44 pagesRtos ComparisonKarthikeyan TNo ratings yet
- Unit I Embedded Computing: 2 Marks QuestionsDocument28 pagesUnit I Embedded Computing: 2 Marks Questionslogu87No ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesFrom EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesRating: 2.5 out of 5 stars2.5/5 (3)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- Robotics: Designing the Mechanisms for Automated MachineryFrom EverandRobotics: Designing the Mechanisms for Automated MachineryRating: 4.5 out of 5 stars4.5/5 (8)
- Create Profitable Side Hustles with Artificial IntelligenceFrom EverandCreate Profitable Side Hustles with Artificial IntelligenceNo ratings yet
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- Learning Robotics, with Robotics, by Robotics: Educational RoboticsFrom EverandLearning Robotics, with Robotics, by Robotics: Educational RoboticsNo ratings yet
- Modeling, Dynamics, and Control of Electrified VehiclesFrom EverandModeling, Dynamics, and Control of Electrified VehiclesRating: 5 out of 5 stars5/5 (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Visions Of Technology: A Century Of Vital Debate About Machines Systems AFrom EverandVisions Of Technology: A Century Of Vital Debate About Machines Systems ARating: 4 out of 5 stars4/5 (9)
- RoboNexus: Bridging Realms: The Confluence of Mechanics, Electronics, and ProgrammingFrom EverandRoboNexus: Bridging Realms: The Confluence of Mechanics, Electronics, and ProgrammingNo ratings yet