You might also like
- Math 250 ADocument13 pagesMath 250 APedro Antonio Marrone GaudianoNo ratings yet
- Homework6 Sol SebastianDocument8 pagesHomework6 Sol SebastianMd Nur-A-Adam DonyNo ratings yet
- Quiz2 Solution 20210525Document3 pagesQuiz2 Solution 20210525e24114100No ratings yet
- SUN AlgebraDocument1 pageSUN AlgebraCarlosSanMillanNo ratings yet
- Ejercicios MMF2Document2 pagesEjercicios MMF2Jhonny RomeroNo ratings yet
- 10.1 Practice Problems-Solutions: y X y X y XDocument2 pages10.1 Practice Problems-Solutions: y X y X y XMorvaridYiNo ratings yet
- Evans Pde Solutions, Chapter 2: U B Du + Cu 0 On R U GonrDocument19 pagesEvans Pde Solutions, Chapter 2: U B Du + Cu 0 On R U Gonrsarathsasi0% (1)
- Analītiskā Ķīmija I Formulu LapaDocument3 pagesAnalītiskā Ķīmija I Formulu LapaaNo ratings yet
- BioMEMS Sheet2 ADocument7 pagesBioMEMS Sheet2 Atracywst0123No ratings yet
- PSDC 29Document25 pagesPSDC 29Dinesh ShettyNo ratings yet
- I / & P Á Þ o Æ I (MATH161) :, 0) X+ y 1, X 0, y 0. Ydy Xtan X X + Sec X, - X - 1Document3 pagesI / & P Á Þ o Æ I (MATH161) :, 0) X+ y 1, X 0, y 0. Ydy Xtan X X + Sec X, - X - 1서정민No ratings yet
- 9 The M/G/1 System: 9.1 The Queue Length Distribution On Departure InstantsDocument8 pages9 The M/G/1 System: 9.1 The Queue Length Distribution On Departure InstantsКлара АндрееваNo ratings yet
- Assignment #1: A A B BDocument3 pagesAssignment #1: A A B BJuan Sebastian ArangoNo ratings yet
- Final Solutions 2017Document13 pagesFinal Solutions 2017raja hahaNo ratings yet
- The Matrix Exponential (With Exercises) by Dan Klain Corrections and Comments Are WelcomeDocument8 pagesThe Matrix Exponential (With Exercises) by Dan Klain Corrections and Comments Are Welcomeabcdfr2No ratings yet
- Chapter 4 Os Quadratic EquationsDocument33 pagesChapter 4 Os Quadratic EquationsYaseen TariqueNo ratings yet
- TTK4115 SummaryDocument5 pagesTTK4115 SummaryManoj GuptaNo ratings yet
- Midterm Solutions: SOLUTION. We Can Write F (UDocument7 pagesMidterm Solutions: SOLUTION. We Can Write F (UHanna Kristanto100% (1)
- Homework5 SolDocument6 pagesHomework5 SolMd Nur-A-Adam DonyNo ratings yet
- 7 G/M/1 Type ModelsDocument9 pages7 G/M/1 Type ModelsКлара АндрееваNo ratings yet
- 1 Math Fundamentals: 1.1 Integrals, Factors and TechniquesDocument11 pages1 Math Fundamentals: 1.1 Integrals, Factors and Techniquesroy_gettyNo ratings yet
- First Order - Second Order Iir FiltersDocument4 pagesFirst Order - Second Order Iir FiltersKrishna PriyaNo ratings yet
- Math 21 Precalculus Lecture NotesDocument3 pagesMath 21 Precalculus Lecture Notesantonio.sulayNo ratings yet
- ECSE 403 Midterm NotesDocument1 pageECSE 403 Midterm Notesddd ddNo ratings yet
- Mid-Semester Examination: Solution: PHY103A: Physics II Semester II, 2017-18 IIT KanpurDocument11 pagesMid-Semester Examination: Solution: PHY103A: Physics II Semester II, 2017-18 IIT KanpurPaola GongoraNo ratings yet
- Homework 1 Solutions: 2 3 4 K 2 3 K 2 3 K k+1 k+1 k+1 2 3 4 K 2 3 4 K K MDocument9 pagesHomework 1 Solutions: 2 3 4 K 2 3 K 2 3 K k+1 k+1 k+1 2 3 4 K 2 3 4 K K Mhomanho2021No ratings yet
- FormulaDocument2 pagesFormulasayasukaNo ratings yet
- ForceDocument1 pageForceLeanna Elsie JadielNo ratings yet
- Formulario de Calculo DiferencialDocument2 pagesFormulario de Calculo DiferencialHugo MNo ratings yet
- Robótica de Manipuladores: ProblemsDocument6 pagesRobótica de Manipuladores: ProblemsAldo ParedesNo ratings yet
- Tabel Apendix PKSDocument14 pagesTabel Apendix PKSNazia MahmudahNo ratings yet
- DampedDocument3 pagesDampedChristopher J CampbellNo ratings yet
- Continuity Equation / Conservation of MassDocument32 pagesContinuity Equation / Conservation of MassmanigandanNo ratings yet
- Homework 2 Solutions - ECE6550, Fall 2011: N n1 n1 1 0 0 1 n1 n1 n2 1 1Document2 pagesHomework 2 Solutions - ECE6550, Fall 2011: N n1 n1 1 0 0 1 n1 n1 n2 1 1nida haqNo ratings yet
- Elec9731 LM3Document21 pagesElec9731 LM3wyx840927627No ratings yet
- Homework 3 - SolutionsDocument3 pagesHomework 3 - Solutionsnida haqNo ratings yet
- Assignment 2: Transformation and Viewing: 1 Three-Dimensional Homogeneous Coordinates (15 PTS)Document6 pagesAssignment 2: Transformation and Viewing: 1 Three-Dimensional Homogeneous Coordinates (15 PTS)Gopal JaiswalNo ratings yet
- Formula FileDocument2 pagesFormula FileCatherine ShendreNo ratings yet
- Ne in Chess 12344Document1 pageNe in Chess 12344Rodrigo Amaru Bruna VásquezNo ratings yet
- (MATH2111) (2013) (F) Midterm tvmq3t 59229Document7 pages(MATH2111) (2013) (F) Midterm tvmq3t 59229Bobo Lai Po HeiNo ratings yet
- Calculus For Engineers FormulaeDocument4 pagesCalculus For Engineers FormulaeKHÁNH VÂN DIỆPNo ratings yet
- ADocument41 pagesAAayushKumarNo ratings yet
- Transient Waves On Transmission LinesDocument21 pagesTransient Waves On Transmission Linesatul206No ratings yet
- ˆ θ = Deg = = RR sin θdθdϕ: x ˆ y−yˆ x r A R (הפילקה לע הרידגמ תיווזהש חטשה A)Document4 pagesˆ θ = Deg = = RR sin θdθdϕ: x ˆ y−yˆ x r A R (הפילקה לע הרידגמ תיווזהש חטשה A)Naama GloorNo ratings yet
- EE590: Linear Algebra and Optimization Quiz 2: Time: 90 Minutes. 02-Nov 2021 Total: 60 MarksDocument4 pagesEE590: Linear Algebra and Optimization Quiz 2: Time: 90 Minutes. 02-Nov 2021 Total: 60 MarksNibha RanjanNo ratings yet
- (Specialist) 2012 ITute Exam 1 SolutionsDocument2 pages(Specialist) 2012 ITute Exam 1 SolutionsSHINeeXInfiniteNo ratings yet
- Formulário Lista 2: Interpolação PolinomialDocument1 pageFormulário Lista 2: Interpolação PolinomialRicardoNo ratings yet
- Everything About PermutationDocument4 pagesEverything About PermutationMohamed MassoudNo ratings yet
- Lecture 3Document19 pagesLecture 3Suvrasoumya MohantyNo ratings yet
- Uniform DesignDocument1 pageUniform DesignssfofoNo ratings yet
- Frequency Domain Analysis of Dynamic Systems: Grace S. DeaectoDocument26 pagesFrequency Domain Analysis of Dynamic Systems: Grace S. Deaectoblister_xbladeNo ratings yet
- Et - Emt Bee Ac Ms Edc Aet - Solution - 2553Document33 pagesEt - Emt Bee Ac Ms Edc Aet - Solution - 2553pankaj chaurasiaNo ratings yet
- (Oxford Science Publications) Attay Kovetz - Electromagnetic Theory-Oxford University Press (2000) PDFDocument2 pages(Oxford Science Publications) Attay Kovetz - Electromagnetic Theory-Oxford University Press (2000) PDFpbmlNo ratings yet
- Capitulo 2Document9 pagesCapitulo 2BRU_CORCINONo ratings yet
- pp391 Bessel FunctionsDocument7 pagespp391 Bessel Functions蘇建翰No ratings yet
- Math 121A: Homework 4 Solutions: N N N RDocument6 pagesMath 121A: Homework 4 Solutions: N N N RcfisicasterNo ratings yet
- Quiz3 QM2015 SolnDocument5 pagesQuiz3 QM2015 SolnMena AwanNo ratings yet
- Interplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersDocument29 pagesInterplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersLIAKMANNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- MC 10226555 0001Document7 pagesMC 10226555 0001Hema IbraNo ratings yet
- BW-Africa 2023 BrochureDocument12 pagesBW-Africa 2023 BrochureDanial DarimiNo ratings yet
- Project of Consumer BehaviourDocument28 pagesProject of Consumer BehaviourNaveed JuttNo ratings yet
- Navi Mumbai C.A. ListDocument48 pagesNavi Mumbai C.A. ListManish Shetty67% (9)
- Roundup WG Bula MonsantoDocument16 pagesRoundup WG Bula MonsantodandanyddNo ratings yet
- 4439 Chap01Document28 pages4439 Chap01bouthaina otNo ratings yet
- Circular Motion ProblemsDocument4 pagesCircular Motion ProblemsGheline LexcieNo ratings yet
- Splunk Certification: Certification Exam Study GuideDocument18 pagesSplunk Certification: Certification Exam Study GuidesalemselvaNo ratings yet
- Water Quality Management For Production of Freshwater Ornamental SHDocument14 pagesWater Quality Management For Production of Freshwater Ornamental SHVarun KNo ratings yet
- In Coming MailDocument4 pagesIn Coming Mailpoetoet100% (1)
- PETRO TCS Engineering Manual 682Document44 pagesPETRO TCS Engineering Manual 682paulm3565No ratings yet
- Sampling PowerpointDocument21 pagesSampling PowerpointMuhammad Furqan Aslam AwanNo ratings yet
- TP913Document5 pagesTP913jmpateiro1985No ratings yet
- U-Blox Parameters Setting ProtocolsDocument2 pagesU-Blox Parameters Setting Protocolspedrito perezNo ratings yet
- Soal TKM B. Inggris Kls XII Des. 2013Document8 pagesSoal TKM B. Inggris Kls XII Des. 2013Sinta SilviaNo ratings yet
- Details For Order #002 5434861 1225038: Not Yet ShippedDocument1 pageDetails For Order #002 5434861 1225038: Not Yet ShippedSarai NateraNo ratings yet
- 1.1 Cruz v. DENR PDFDocument7 pages1.1 Cruz v. DENR PDFBenBulacNo ratings yet
- Job Description Examples - British GasDocument2 pagesJob Description Examples - British GasIonela IftimeNo ratings yet
- EPM Cloud Tax Reporting Overview - EMEA Training May 2020Document25 pagesEPM Cloud Tax Reporting Overview - EMEA Training May 2020zaymounNo ratings yet
- Partes Oki - MPS5501B - RSPL - Rev - HDocument12 pagesPartes Oki - MPS5501B - RSPL - Rev - HJaiber Eduardo Gutierrez OrtizNo ratings yet
- Nelson/Salmo Pennywise March 15, 2016Document48 pagesNelson/Salmo Pennywise March 15, 2016Pennywise PublishingNo ratings yet
- Digirig Mobile 1 - 9 SchematicDocument1 pageDigirig Mobile 1 - 9 SchematicKiki SolihinNo ratings yet
- OPERATING MANUAL Micro Powder MillDocument51 pagesOPERATING MANUAL Micro Powder MillSher AhmadNo ratings yet
- Inv69116728 45926324Document1 pageInv69116728 45926324dany.cantaragiuNo ratings yet
- Bridging: Transportation: Chapter 3: The Transportation Planning ProcessDocument28 pagesBridging: Transportation: Chapter 3: The Transportation Planning ProcesspercyNo ratings yet
- Zone Controller: Th-LargeDocument1 pageZone Controller: Th-LargeIsmat AraNo ratings yet
- MushroomDocument8 pagesMushroomAkshay AhlawatNo ratings yet
- 19C Financials WNDocument60 pages19C Financials WNbishwabengalitolaNo ratings yet
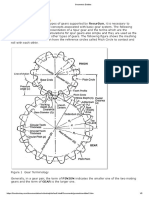
- Geometric Entities: Basic Gear TerminologyDocument5 pagesGeometric Entities: Basic Gear TerminologyMatija RepincNo ratings yet
- Magicolor2400 2430 2450FieldSvcDocument262 pagesMagicolor2400 2430 2450FieldSvcKlema HanisNo ratings yet