You might also like
- Inverse of A MatrixDocument26 pagesInverse of A MatrixBrandeice BarrettNo ratings yet
- Ma Zak Manuals 1967Document158 pagesMa Zak Manuals 1967jing100% (1)
- Wiring Guide 12.6 en PDFDocument326 pagesWiring Guide 12.6 en PDFjuanpepepabloNo ratings yet
- AN - PRC-117 (V) (C) Quick Reference Pocket GuideDocument293 pagesAN - PRC-117 (V) (C) Quick Reference Pocket GuideT Hurt100% (4)
- JVC TK-C720U Schematics Service ManualDocument52 pagesJVC TK-C720U Schematics Service ManualAntonio CarlosNo ratings yet
- PN423522 (1) Checkfire SC-NDocument50 pagesPN423522 (1) Checkfire SC-NJhojanCeleita50% (2)
- ManualProgramacion XinjeDocument366 pagesManualProgramacion XinjeIsidro Igigi HernándezNo ratings yet
- No 6Document28 pagesNo 6Ifin KeceNo ratings yet
- No 2Document22 pagesNo 2Ifin KeceNo ratings yet
- Indah Word Soal 4Document23 pagesIndah Word Soal 4Fenny EkaNo ratings yet
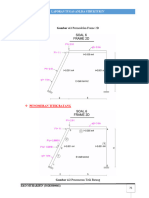
- Rangka Batang RhezaDocument11 pagesRangka Batang RhezaKABINET JALADARA NABDANo ratings yet
- No 2Document8 pagesNo 2Fauziah Karina WNo ratings yet
- No 5Document9 pagesNo 5Fauziah Karina WNo ratings yet
- Analisa Struktur Iv Soal No.2 Truss 2D: Properti Es A E 1 0,0 02 2,1 E7 P 20 TonDocument12 pagesAnalisa Struktur Iv Soal No.2 Truss 2D: Properti Es A E 1 0,0 02 2,1 E7 P 20 TonWira d mNo ratings yet
- Referensi AS4Document82 pagesReferensi AS4Nicgara ArNo ratings yet
- No 1Document7 pagesNo 1Fauziah Karina WNo ratings yet
- No 6Document10 pagesNo 6Fauziah Karina WNo ratings yet
- Balok 2 TumpuanDocument2 pagesBalok 2 TumpuanLuthfi NindyapradanaNo ratings yet
- FEA Code in Matlab For A Truss StructureADocument33 pagesFEA Code in Matlab For A Truss StructureAiScribdRNo ratings yet
- OB1Document4 pagesOB1Alexander TenorioNo ratings yet
- FB131Document7 pagesFB131Hoangvinh DuongNo ratings yet
- Manual de Instrução Drive DCD - 1Document48 pagesManual de Instrução Drive DCD - 1aldeirtrabalho001No ratings yet
- FB122Document11 pagesFB122Hoangvinh DuongNo ratings yet
- Fast algorithms for sorting and searching listsDocument78 pagesFast algorithms for sorting and searching liststhirupathiNo ratings yet
- FB127 - <offline> Spindle Control Function BlockDocument4 pagesFB127 - <offline> Spindle Control Function BlockHoangvinh DuongNo ratings yet
- Global DOF Number for Each MemberDocument11 pagesGlobal DOF Number for Each MemberIrma AnggrainiNo ratings yet
- Comporg6 Sol5Document5 pagesComporg6 Sol5gx2603543172No ratings yet
- JZC 80X50PSB RG Interface DescriptionDocument5 pagesJZC 80X50PSB RG Interface DescriptionyatnierNo ratings yet
- FB151Document20 pagesFB151Hoangvinh DuongNo ratings yet
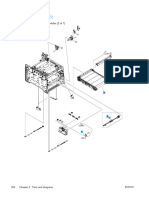
- HP Color Laserjet Pro m451 Internal Components 2 of 5Document2 pagesHP Color Laserjet Pro m451 Internal Components 2 of 5javier veraNo ratings yet
- DNA fingerprinting and cluster analysis techniquesDocument5 pagesDNA fingerprinting and cluster analysis techniquesAddin Hayu PNo ratings yet
- MELSEC iQ-R PROFINET IO Controller Module Function Block ReferenceDocument36 pagesMELSEC iQ-R PROFINET IO Controller Module Function Block ReferenceNguyễn Minh PhươngNo ratings yet
- 8085 Pins and Signals GuideDocument13 pages8085 Pins and Signals Guideshubhankar palNo ratings yet
- Solutions For VFD Test 2Document12 pagesSolutions For VFD Test 2Daniel JovelNo ratings yet
- PLC LAB SIMULATION TITLEDocument8 pagesPLC LAB SIMULATION TITLEHafiz ShamNo ratings yet
- Hl-3040cn, Hl-3070cw Parts ListDocument38 pagesHl-3040cn, Hl-3070cw Parts ListlftrevNo ratings yet
- Index Column Cardinality OrderDocument4 pagesIndex Column Cardinality Ordermsacs09No ratings yet
- BNI IOL-719-002-Z012 BNI IOL-719-002-Z012-C10: User S GuideDocument34 pagesBNI IOL-719-002-Z012 BNI IOL-719-002-Z012-C10: User S GuideGabriel CardosoNo ratings yet
- STAAD - Pro Report: R.R. Ispat (A Unit of Gpil) Raipur 20 M High MastDocument11 pagesSTAAD - Pro Report: R.R. Ispat (A Unit of Gpil) Raipur 20 M High MastNIRMAN INFRASTRUCTURESNo ratings yet
- Competing Risks Data Study Models Maintenance QualityDocument17 pagesCompeting Risks Data Study Models Maintenance QualityRicardo Javier PlasenciaNo ratings yet
- 19 Experiment 15 MultiplexerDocument4 pages19 Experiment 15 MultiplexerJhong JhongNo ratings yet
- LSDDocument7 pagesLSDkasuwedaNo ratings yet
- Chapter 7Document78 pagesChapter 7孫協廷No ratings yet
- AN - 3325 How To Use SAMA5D2 UART Under Linux 00003325a PDFDocument15 pagesAN - 3325 How To Use SAMA5D2 UART Under Linux 00003325a PDFdabapo6983No ratings yet
- FFT Imp ButterflyDocument14 pagesFFT Imp ButterflyFarhaNazneenNo ratings yet
- vigas-REFUERZO - PLACAS BASE-sta - Maria-SoldadurasDocument12 pagesvigas-REFUERZO - PLACAS BASE-sta - Maria-SoldadurasEfrén GutiérrezNo ratings yet
- Macro para Unitario y BinarioDocument9 pagesMacro para Unitario y BinarioJorge Lezma JaraNo ratings yet
- Multimeter Um Ber NSN: Illustrated PartsDocument34 pagesMultimeter Um Ber NSN: Illustrated PartsXptoleo LeoNo ratings yet
- Parts Reference List: MODEL: MFC-J3520/J3720/ J6520DW/J6720DW/J6920DWDocument32 pagesParts Reference List: MODEL: MFC-J3520/J3720/ J6520DW/J6720DW/J6920DWImprilab ImpressorasNo ratings yet
- Perceuse_Service1PDFDocument4 pagesPerceuse_Service1PDFsamynouari4No ratings yet
- Freeman, RandyDocument43 pagesFreeman, RandyAhmed Essam El-DinNo ratings yet
- TLE4208G: Data SheetDocument16 pagesTLE4208G: Data SheetБелка ДикаяNo ratings yet
- DCP J562DW - J785DW - MFC J460DW J480DW J485DW J680DW J880DW J885DW J985DW PDFDocument31 pagesDCP J562DW - J785DW - MFC J460DW J480DW J485DW J680DW J880DW J885DW J985DW PDFfefotroncitoNo ratings yet
- Factor Analysis: NotesDocument5 pagesFactor Analysis: NotesPhạm Thùy TrangNo ratings yet
- Man Bni DNT X0X 000 Z00X en I18 Dok 895063 03 000Document36 pagesMan Bni DNT X0X 000 Z00X en I18 Dok 895063 03 000Héctor Eduardo Hernández LópezNo ratings yet
- Bergerlahr Wdp3 01x ManualDocument114 pagesBergerlahr Wdp3 01x ManualAmit SharmaNo ratings yet
- Question ONE Solution ProceduresDocument19 pagesQuestion ONE Solution ProceduresTszwun CheungNo ratings yet
- Ch3 GE ISM-236704 PDFDocument47 pagesCh3 GE ISM-236704 PDFEQ-solutionsNo ratings yet
- Micom P630C: Transformer Differential Protection DeviceDocument396 pagesMicom P630C: Transformer Differential Protection Devicemari78svksNo ratings yet
- Economic and Financial Modelling with EViews: A Guide for Students and ProfessionalsFrom EverandEconomic and Financial Modelling with EViews: A Guide for Students and ProfessionalsNo ratings yet
- LinearAlgebra2000 Bookmatter ModellingAndControlOfRobotManiDocument41 pagesLinearAlgebra2000 Bookmatter ModellingAndControlOfRobotManidoudikidNo ratings yet
- Adjoint and Inverse of A MatrixDocument7 pagesAdjoint and Inverse of A MatrixFELOMINO LLACUNA JR.No ratings yet
- Number Bases 1Document2 pagesNumber Bases 1Khalijah Mohd AliNo ratings yet
- 1 Singular Value Decomposition: Lecture 8-10 Notes: SVD and Its ApplicationsDocument8 pages1 Singular Value Decomposition: Lecture 8-10 Notes: SVD and Its Applicationssansan33333333383140No ratings yet
- An Overhead ThreeDocument2 pagesAn Overhead ThreeWILFRIDO DAVID MONTACHANA MONTACHANANo ratings yet
- 3D Transformations GuideDocument48 pages3D Transformations GuideAhmed AbdelsattarNo ratings yet
- Decomposing lattice matrices into symmetric and skew-symmetric partsDocument10 pagesDecomposing lattice matrices into symmetric and skew-symmetric partssdprvNo ratings yet
- Matrice and Detetminants-1Document17 pagesMatrice and Detetminants-1Devil gamezNo ratings yet
- APPLIED MATHEMATICS I - Chapter 2: Matrices, Determinants and Systems of Linear Equations - by Dr. Tadesse BekeshieDocument38 pagesAPPLIED MATHEMATICS I - Chapter 2: Matrices, Determinants and Systems of Linear Equations - by Dr. Tadesse BekeshieTadesse B. Gerbaba100% (1)
- Advance Mathematics LectureDocument6 pagesAdvance Mathematics LectureMeverlyn RoqueroNo ratings yet
- !MA2001 Summary NotesDocument12 pages!MA2001 Summary NotesXie NiyunNo ratings yet
- Orthogonal Diagonalization: Linear Algebra Eigenvalues and DiagonalizationDocument8 pagesOrthogonal Diagonalization: Linear Algebra Eigenvalues and DiagonalizationprabhakarNo ratings yet
- IGCSE Matrices Index:: Please Click On The Question Number You WantDocument17 pagesIGCSE Matrices Index:: Please Click On The Question Number You WantNad HsNo ratings yet
- Chapter 1 SVDocument24 pagesChapter 1 SVHuỳnh TiênNo ratings yet
- Mathematics of Radiation Science I GTX 106: Matrices & System of Linear EquationsDocument18 pagesMathematics of Radiation Science I GTX 106: Matrices & System of Linear Equationslaila qistinaNo ratings yet
- Detyra Nga Matricat Dhe Determinatat - UshtrimeDocument37 pagesDetyra Nga Matricat Dhe Determinatat - UshtrimeAcidi Lawrencium83% (24)
- Determinants, 2x2 Math AnalysisDocument1 pageDeterminants, 2x2 Math AnalysisKarina TejeraNo ratings yet
- Direct Methods For Solving Linear Equations SystemsDocument15 pagesDirect Methods For Solving Linear Equations Systemspedroquiroga7100% (2)
- Bahasa InggrisDocument13 pagesBahasa InggrisvonieNo ratings yet
- Math 110: Linear Algebra Practice Final SolutionsDocument7 pagesMath 110: Linear Algebra Practice Final SolutionsCody SageNo ratings yet
- Bus Admittance Impedance. Matrix Algorithm. MatlabDocument4 pagesBus Admittance Impedance. Matrix Algorithm. MatlabKhurram Hashmi100% (2)
- 1966 - Potter - Matrix Quadratic SolutionsDocument7 pages1966 - Potter - Matrix Quadratic SolutionsJames BrownNo ratings yet
- Tutorial 1 SolutionsDocument4 pagesTutorial 1 Solutionsteju1996coolNo ratings yet
- Definiteness of A MatrixDocument11 pagesDefiniteness of A MatrixRafika RahmawatiNo ratings yet
- Matrices and Determinant L1 Youtube PDFDocument36 pagesMatrices and Determinant L1 Youtube PDFjon cinaNo ratings yet
- Determinants - Advanced MathDocument21 pagesDeterminants - Advanced MathJoan PoncedeleonNo ratings yet
- Practice Set on MatricesDocument2 pagesPractice Set on MatricesABDUS SAMADNo ratings yet
- Lecture 1review of MatricesDocument27 pagesLecture 1review of MatricesJames PrakashNo ratings yet
- 3.1 Some Simple Properties: G G G G G G G IDocument11 pages3.1 Some Simple Properties: G G G G G G G IAnonymous Y2ibaULes1No ratings yet