You might also like
- Pushover AnalysisDocument62 pagesPushover AnalysisRakesh7770100% (2)
- MS For Domestic Water (Hot & Cold)Document8 pagesMS For Domestic Water (Hot & Cold)Mohamed Elarabi50% (2)
- GD2Document14 pagesGD2youknows50% (2)
- Pile Load Calculation by HEIDocument16 pagesPile Load Calculation by HEILandon MitchellNo ratings yet
- Comparison Horizontal Vs Vertical SeparatorDocument54 pagesComparison Horizontal Vs Vertical SeparatorEng Kim Wei100% (6)
- 10 CFD Simulation of Hydrocyclone in Absense of An Air Core 2012Document10 pages10 CFD Simulation of Hydrocyclone in Absense of An Air Core 2012Jair GtzNo ratings yet
- Boiler ConstructionDocument4 pagesBoiler ConstructionrpshvjuNo ratings yet
- Substructure Final PDFDocument34 pagesSubstructure Final PDFSushmit Sharma100% (1)
- CFD Ball ValveDocument8 pagesCFD Ball ValveKelvin Octavianus DjohanNo ratings yet
- 3) Sme & Makeup Air CalculationDocument33 pages3) Sme & Makeup Air CalculationAshiq NishmaNo ratings yet
- Numerical Modelling and Analysis of Fluid Flow and Deformation of Fractured Rock MassesFrom EverandNumerical Modelling and Analysis of Fluid Flow and Deformation of Fractured Rock MassesXing ZhangNo ratings yet
- Design of ESCP FacilitiesDocument30 pagesDesign of ESCP FacilitiesMohd Salmi YusoffNo ratings yet
- Inspection Checklist For Precast Gully Installation: Form No: C851/6-CLT-QMT-0002 Rev.00Document1 pageInspection Checklist For Precast Gully Installation: Form No: C851/6-CLT-QMT-0002 Rev.00JabinNo ratings yet
- Dellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Document11 pagesDellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Milagros Alejandra Aragón DimasNo ratings yet
- Computers & Fluids: Engin Gedik, Hüseyin Kurt, Ziyaddin Recebli, Corneliu BalanDocument7 pagesComputers & Fluids: Engin Gedik, Hüseyin Kurt, Ziyaddin Recebli, Corneliu BalanRehman UllahNo ratings yet
- Dumitrescu 2020 IOP Conf. Ser. Mater. Sci. Eng. 916 012035Document10 pagesDumitrescu 2020 IOP Conf. Ser. Mater. Sci. Eng. 916 012035Sbaa SbaaNo ratings yet
- A Review On Optimal Design of Magneto-Rheological DamperDocument10 pagesA Review On Optimal Design of Magneto-Rheological DamperTJPRC PublicationsNo ratings yet
- Ijsrp p1206Document7 pagesIjsrp p1206aakrit paiNo ratings yet
- POF Flow Characterization in Convergingdiverging MicrochannelsDocument8 pagesPOF Flow Characterization in Convergingdiverging MicrochannelsChirodeep BakliNo ratings yet
- Hemadri 2018 2Document11 pagesHemadri 2018 2Vadiraj HemadriNo ratings yet
- Engineering Science and Technology, An International JournalDocument9 pagesEngineering Science and Technology, An International JournalAli EmamiNo ratings yet
- Khakpour 2014 IOP Conf. Ser.: Earth Environ. Sci. 22 052016Document11 pagesKhakpour 2014 IOP Conf. Ser.: Earth Environ. Sci. 22 052016Sexy IdolNo ratings yet
- Evaluation of Nonlinear Dynamic Phenomena in The HystereticBehaviour of Magnetorheological DampersDocument36 pagesEvaluation of Nonlinear Dynamic Phenomena in The HystereticBehaviour of Magnetorheological DampersGeorge LazarNo ratings yet
- Comparison of Two-Phase Pipe Flow in Openfoam With A Mechanistic ModelDocument14 pagesComparison of Two-Phase Pipe Flow in Openfoam With A Mechanistic ModelMusa MohammadNo ratings yet
- 1 Faz Khullar - 2022 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 1079 - 012027Document9 pages1 Faz Khullar - 2022 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 1079 - 012027KaanNo ratings yet
- Sharma 2018 IOP Conf. Ser. - Mater. Sci. Eng. 402 012056Document10 pagesSharma 2018 IOP Conf. Ser. - Mater. Sci. Eng. 402 012056MOHD NOR FAKHZAN MOHD KAZIMNo ratings yet
- Yang - 2012 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 15 - 032057Document8 pagesYang - 2012 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 15 - 032057Wika SentiongNo ratings yet
- Chenderoh Vibration AnalysisDocument11 pagesChenderoh Vibration AnalysisPrapatsorn ChomsreeNo ratings yet
- Rhode 1986Document7 pagesRhode 1986Amin ZoljanahiNo ratings yet
- Design and Setup The Sampling System To Modify and Reduce The Deposition in Sampling Fluid Pipe Lines by Reducing The Pressure Drop 2157 7544.1000131Document4 pagesDesign and Setup The Sampling System To Modify and Reduce The Deposition in Sampling Fluid Pipe Lines by Reducing The Pressure Drop 2157 7544.1000131_Greg_No ratings yet
- BL Asiak 2017Document10 pagesBL Asiak 2017Miguel Angel BeltranNo ratings yet
- Hydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDocument10 pagesHydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDr R Panneer SelvamNo ratings yet
- Krishnamoorthy and Ghajar - 2007 - Single-Phase Friction Factor in Micro-Tubes A CriDocument13 pagesKrishnamoorthy and Ghajar - 2007 - Single-Phase Friction Factor in Micro-Tubes A CriXiao HouNo ratings yet
- The Influence of Wind Load On The Stress Characteristics of Dropper For A High-Speed RailwayDocument13 pagesThe Influence of Wind Load On The Stress Characteristics of Dropper For A High-Speed RailwayDineshSharmaNo ratings yet
- AComplete Analytical Modelfor Square Diaphragm Capcitive Sensor With Clamped EdgesDocument5 pagesAComplete Analytical Modelfor Square Diaphragm Capcitive Sensor With Clamped EdgesJonas HilarioNo ratings yet
- Flow Measurement and Instrumentation: Mohammad Shirkosh, Yousef Hojjat, Hesam SadeghianDocument7 pagesFlow Measurement and Instrumentation: Mohammad Shirkosh, Yousef Hojjat, Hesam SadeghianRoer Eka PawinantoNo ratings yet
- Study of Numerical Simulation Applying To The Design of An Orifice With High-Velocity WaterjetDocument10 pagesStudy of Numerical Simulation Applying To The Design of An Orifice With High-Velocity WaterjetYu HuiNo ratings yet
- Ijciet: International Journal of Civil Engineering and Technology (Ijciet)Document10 pagesIjciet: International Journal of Civil Engineering and Technology (Ijciet)IAEME PublicationNo ratings yet
- E0f9 PDFDocument6 pagesE0f9 PDFnikhil tiwariNo ratings yet
- Analysis and Experiment of Capillary Valves For Microfluidics On A Rotating DiskDocument11 pagesAnalysis and Experiment of Capillary Valves For Microfluidics On A Rotating DiskTóth GáborNo ratings yet
- Extra CAD PersecptionDocument15 pagesExtra CAD PersecptioncatherineNo ratings yet
- A Study Into The Effect of Tip Clearance On The Performance of B-Series and Kaplan-Series Ducted PropellersDocument9 pagesA Study Into The Effect of Tip Clearance On The Performance of B-Series and Kaplan-Series Ducted PropellersPrasad PatilNo ratings yet
- Ijfmr30 2003Document18 pagesIjfmr30 2003Santosa Edy WibowoNo ratings yet
- Shear Mode Flow Squeeze PDFDocument10 pagesShear Mode Flow Squeeze PDFSandeep BabuNo ratings yet
- Analytical Performance Study of Explosively Formed ProjectilesDocument12 pagesAnalytical Performance Study of Explosively Formed ProjectilesBernard ShamNo ratings yet
- Erosion RateDocument16 pagesErosion RateRabea asifNo ratings yet
- Investigation of Flow Separation in A CentrifugalDocument13 pagesInvestigation of Flow Separation in A CentrifugalEric21No ratings yet
- A Numerical Investigation of The Incompressible Flow Through A Butterfly Valve Using CFDDocument7 pagesA Numerical Investigation of The Incompressible Flow Through A Butterfly Valve Using CFDAhmed El-dawy100% (1)
- Article IJCRDocument6 pagesArticle IJCRAlessandro Da Cruz GoncalvesNo ratings yet
- Determination of Burst Pressure of API Steel PipesDocument10 pagesDetermination of Burst Pressure of API Steel PipesssathyanarayananNo ratings yet
- SimulationDocument5 pagesSimulationSalah Eddine Ait AissaNo ratings yet
- A Generalized 3D Numerical Wave Tank For Practical Wave-Structure Interactions in Steep WavesDocument9 pagesA Generalized 3D Numerical Wave Tank For Practical Wave-Structure Interactions in Steep WaveslapuNo ratings yet
- Hydrodynamic Metamaterials For Flow Manipulation - Functions and ProspectsDocument9 pagesHydrodynamic Metamaterials For Flow Manipulation - Functions and ProspectsComm PropertyNo ratings yet
- Analytical Stress and Displacement Due To Twin Tunneling in An Elastic Semi-Infinite Ground Subjected To Surcharge LoadsDocument21 pagesAnalytical Stress and Displacement Due To Twin Tunneling in An Elastic Semi-Infinite Ground Subjected To Surcharge LoadsAbdelmoez ElgarfNo ratings yet
- Bachmann Mehammer 2018 J. Phys. Conf. Ser. 1104 012008Document11 pagesBachmann Mehammer 2018 J. Phys. Conf. Ser. 1104 012008Teckzhi TanNo ratings yet
- Non-Stationary CFD Simulation of A Gear Pump: SciencedirectDocument8 pagesNon-Stationary CFD Simulation of A Gear Pump: SciencedirectJuanCa BarbosaNo ratings yet
- 1 s2.0 S0263823122005882 MainDocument13 pages1 s2.0 S0263823122005882 Mainإسماعيل مظفرNo ratings yet
- CFD Analysis of CompressibleDocument8 pagesCFD Analysis of CompressibleGanesh ValtuleNo ratings yet
- A Method To Simulate The MR Fluid in ANSYSDocument19 pagesA Method To Simulate The MR Fluid in ANSYSshreedharkolekarNo ratings yet
- Compressible Flow Through Convergent-Divergent Nozzle: February 2020Document9 pagesCompressible Flow Through Convergent-Divergent Nozzle: February 2020NHNo ratings yet
- 1 s2.0 S0142727X17310354 MainDocument21 pages1 s2.0 S0142727X17310354 MainYash Sanjay ShewaleNo ratings yet
- Evaluation of Hydrodynamic Forces On Turbine RingDocument10 pagesEvaluation of Hydrodynamic Forces On Turbine RingrajfabNo ratings yet
- Ijmet 10 01 012Document14 pagesIjmet 10 01 012IAEME PUBLICATIONNo ratings yet
- CFD Analysis Around Ahmed Body Using A Laminar KinDocument9 pagesCFD Analysis Around Ahmed Body Using A Laminar Kinmark mutimushiNo ratings yet
- Sasassasfey4 HFTGHBRTDocument3 pagesSasassasfey4 HFTGHBRTSamei DLNo ratings yet
- 2016 - Advances in Mechanical EngineeringDocument12 pages2016 - Advances in Mechanical Engineeringchauhan303No ratings yet
- Ijet V3i6p84Document6 pagesIjet V3i6p84International Journal of Engineering and TechniquesNo ratings yet
- Fedsm2016 7889 PDFDocument11 pagesFedsm2016 7889 PDFJohn StoneNo ratings yet
- Paper 05 2015Document5 pagesPaper 05 2015Johan MorilloNo ratings yet
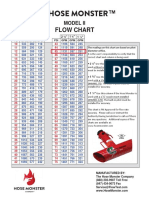
- HM2H Flow Chart GPMDocument1 pageHM2H Flow Chart GPMJishnu MedhiNo ratings yet
- SPE 184702 Cement Displacement FinalDocument20 pagesSPE 184702 Cement Displacement FinalMauricio TrebilcockNo ratings yet
- Experimental and Analytical Study On Behaviour ofDocument9 pagesExperimental and Analytical Study On Behaviour ofrudynyambiNo ratings yet
- How To Draw Your Own Column InteractionDocument23 pagesHow To Draw Your Own Column InteractionErwin ObenzaNo ratings yet
- Sampling From Test Pits, Trenches and Stockpiles: Pdhonline Course C289 (3 PDH)Document12 pagesSampling From Test Pits, Trenches and Stockpiles: Pdhonline Course C289 (3 PDH)Meii Seng VongthavixaiNo ratings yet
- ME 2256 - Strength of Materials - Lab ManualDocument36 pagesME 2256 - Strength of Materials - Lab ManualMohan Prasad.M100% (22)
- 45-150 Floor Deck Data SheetDocument1 page45-150 Floor Deck Data SheetAkhil VNNo ratings yet
- 067 S 13200 Elevated Water Storage TankDocument7 pages067 S 13200 Elevated Water Storage TankAsep SuhermanNo ratings yet
- Housing Rental Inspection ChecklistDocument2 pagesHousing Rental Inspection ChecklistKnownUnknowns-XNo ratings yet
- Bom TECO 2PDocument1 pageBom TECO 2PTrongtai LuuNo ratings yet
- Iso 2604-2Document15 pagesIso 2604-2Yusri WyeuserieyNo ratings yet
- Can Be Considered The Thin-Walled Steel Structures Suitable To Be Used in Seismic Regions?Document18 pagesCan Be Considered The Thin-Walled Steel Structures Suitable To Be Used in Seismic Regions?uhu_plus6482No ratings yet
- SuperT Girder Shape B1 B2 ExposureDocument1 pageSuperT Girder Shape B1 B2 Exposureparadoja_hiperbolicaNo ratings yet
- Yuantai Crane: Semi-Gantry Crane With Electric Hoist SpecificationDocument11 pagesYuantai Crane: Semi-Gantry Crane With Electric Hoist SpecificationThein MaungNo ratings yet
- Performances of Concrete Repairs in PracticeDocument29 pagesPerformances of Concrete Repairs in PracticeChris RodopoulosNo ratings yet
- Tiger Lpo - 11583 Imkan 1 AdDocument3 pagesTiger Lpo - 11583 Imkan 1 AdabdulrahimNo ratings yet
- Investigation On The Effects of Wood Ash As An Admixture in Steel Fibre-Reinforced ConcreteDocument17 pagesInvestigation On The Effects of Wood Ash As An Admixture in Steel Fibre-Reinforced ConcreteWuod ElizaNo ratings yet
- Ech 3101 - Homework 2Document36 pagesEch 3101 - Homework 2Wan Nur AtikahNo ratings yet
- Introduction To Fluids (Physics)Document67 pagesIntroduction To Fluids (Physics)Nadzmiah Mangotara ArumpacNo ratings yet
- RAB Serang Sumbersih KosonganDocument5 pagesRAB Serang Sumbersih KosonganMahdi M AliNo ratings yet
- Analysis and Design of Slabs 2Document24 pagesAnalysis and Design of Slabs 2Adil Javed ChaudharyNo ratings yet