You might also like
- Unit 8: Part 2: PD, PID, and Feedback Compensation: Engineering 5821: Control Systems IDocument32 pagesUnit 8: Part 2: PD, PID, and Feedback Compensation: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- 3 Transient Performance Design Via Cascade Compensation: 3.1 The Lead CompensatorDocument6 pages3 Transient Performance Design Via Cascade Compensation: 3.1 The Lead CompensatorYassine DjillaliNo ratings yet
- Assignment 2 FBDocument13 pagesAssignment 2 FBNoorbazilah AbdullahNo ratings yet
- Processcontrol Topic13 PidtuningDocument15 pagesProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Week 4 Assignment 1 SolutionDocument10 pagesWeek 4 Assignment 1 Solutionkirankuma.jagtapNo ratings yet
- EEE402 Exp06Document3 pagesEEE402 Exp06Maksud SarkerNo ratings yet
- Ee481 p11 Root Locus DesignDocument77 pagesEe481 p11 Root Locus DesignDwi Ika BasithaNo ratings yet
- Clase 17 Diseño Por Medio Del LGR PIDDocument46 pagesClase 17 Diseño Por Medio Del LGR PIDCristhian RamosNo ratings yet
- Analysis and Design of Control SystemsDocument34 pagesAnalysis and Design of Control Systemspradnyajadhav225_136No ratings yet
- ELE 4623: Control Systems: PD Compensator Design and EvaluationDocument16 pagesELE 4623: Control Systems: PD Compensator Design and EvaluationMaitha SaeedNo ratings yet
- IntroCtrlSys - Final Exam - 2nd Semester - 1819 - SolutionDocument6 pagesIntroCtrlSys - Final Exam - 2nd Semester - 1819 - SolutionKhoa NguyễnNo ratings yet
- Compensator Design II PDFDocument37 pagesCompensator Design II PDFMani Vannan SoundarapandiyanNo ratings yet
- Lab 3 - Analyze Discrete PID ControllerDocument7 pagesLab 3 - Analyze Discrete PID ControllerDƯƠNG HUỲNH ĐÌNH CHIÊUNo ratings yet
- Design of PID ControllerDocument13 pagesDesign of PID ControllershrikrisNo ratings yet
- Notes On Control Systems 05Document11 pagesNotes On Control Systems 05Yazdan RastegarNo ratings yet
- 20 THDocument28 pages20 THujjwal kumarNo ratings yet
- Lead Compensator-Time DomainDocument17 pagesLead Compensator-Time Domainberkut samakaNo ratings yet
- Op Amp Pid Paper MATEC FORMATDocument3 pagesOp Amp Pid Paper MATEC FORMAT류홍제No ratings yet
- Compensator Design: Karen WillcoxDocument13 pagesCompensator Design: Karen WillcoxKhushal shendeNo ratings yet
- Embedded Application of Fractional Order Control: R. Duma, P. Dobra and M. TruscaDocument2 pagesEmbedded Application of Fractional Order Control: R. Duma, P. Dobra and M. TruscaMiguel D. Diaz H.No ratings yet
- Lesson 4.1 - Group 1Document18 pagesLesson 4.1 - Group 1Bảo ThiênNo ratings yet
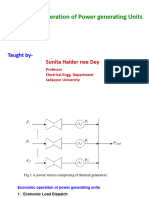
- Perf - 21-22 - SH Class4 - SecB - Part2Document17 pagesPerf - 21-22 - SH Class4 - SecB - Part2dark gamerNo ratings yet
- IntroCtrlSys - Final Exam - 1st Semester - 1920 - Solution PDFDocument5 pagesIntroCtrlSys - Final Exam - 1st Semester - 1920 - Solution PDFTran Nguyen KhangNo ratings yet
- Process ControlDocument26 pagesProcess ControlMeenaNo ratings yet
- Load Frequency Control Via Internal Model Control SchemesDocument25 pagesLoad Frequency Control Via Internal Model Control SchemesRahul PandeyNo ratings yet
- Name/Signature: EE496B - Controls Lab - Fall 2021Document2 pagesName/Signature: EE496B - Controls Lab - Fall 2021kasun prabhathNo ratings yet
- Controller Design Using Root Locus: 14.1 PD ControlDocument11 pagesController Design Using Root Locus: 14.1 PD Controlasalifew belachewNo ratings yet
- Aircraft Pitch - G1 ReportDocument79 pagesAircraft Pitch - G1 ReportTrabajo AviaciónNo ratings yet
- Metodo de Ziegler-NicholsDocument3 pagesMetodo de Ziegler-Nicholsjuan daniel camas cruzNo ratings yet
- Lab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveDocument10 pagesLab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveAsad saeedNo ratings yet
- Institute of Engineering Purwanchal Campus, Dharan-8Document12 pagesInstitute of Engineering Purwanchal Campus, Dharan-8Milan AcharyaNo ratings yet
- An Introduction To Proportional-Integral-Derivative (PID) ControllersDocument47 pagesAn Introduction To Proportional-Integral-Derivative (PID) ControllersAmar BeheraNo ratings yet
- 4TH Year PPT - ModDocument20 pages4TH Year PPT - ModDivya BhartiNo ratings yet
- 15IF11 Multicore E PDFDocument14 pages15IF11 Multicore E PDFRakesh VenkatesanNo ratings yet
- Fuzzy Lab#1 Udara VER 2Document13 pagesFuzzy Lab#1 Udara VER 2Yudara AlmeidaNo ratings yet
- PID ControllerDocument3 pagesPID Controllersmahesh_1980No ratings yet
- Convol 3 D 16 BitDocument14 pagesConvol 3 D 16 BitmikimaricNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument46 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Part I: Discrete PID Gains As Functions of Sampling TimeDocument9 pagesPart I: Discrete PID Gains As Functions of Sampling Timemasb29009No ratings yet
- Reg - No:18BEC0175 ECE 3002 VLSI System Design Task. No: 05Document11 pagesReg - No:18BEC0175 ECE 3002 VLSI System Design Task. No: 05Kotha Hemanth100% (1)
- Classical Control: Proportional, Integral, Derivative (PID) ControlDocument28 pagesClassical Control: Proportional, Integral, Derivative (PID) ControlAdil KhanNo ratings yet
- Chapter 15 Transformer DesignDocument14 pagesChapter 15 Transformer Designkaren dejoNo ratings yet
- Servo FundamentalsDocument11 pagesServo Fundamentalsapi-3797895No ratings yet
- Result: Diagram 1: Open-Loop Water Temperature Control SystemDocument13 pagesResult: Diagram 1: Open-Loop Water Temperature Control SystemSingAnnNo ratings yet
- Advanced PID Controller ImplementationDocument13 pagesAdvanced PID Controller Implementationlizhi0007100% (1)
- CH 15 SlidesDocument40 pagesCH 15 SlidesAkhileshkumar PandeyNo ratings yet
- Lecture I - Introduction To PID Control SystemDocument47 pagesLecture I - Introduction To PID Control SystemR.W. SaputraNo ratings yet
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 pagesAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNo ratings yet
- Relaxed Ziegler-Nichols Closed Loop Tuning of PI ControllersDocument15 pagesRelaxed Ziegler-Nichols Closed Loop Tuning of PI ControllersAkhilesh Kumar MishraNo ratings yet
- Bangladesh University of Engineering and Technology: Course Name: Chemical Engineering Laboratory-VDocument9 pagesBangladesh University of Engineering and Technology: Course Name: Chemical Engineering Laboratory-VMd Abid AfridiNo ratings yet
- Lab 7 Pid ControlDocument6 pagesLab 7 Pid ControlFatin FarehahNo ratings yet
- Digital Assignment-2 Process Automation and Control Lab LAB SLOT:-L33+L34Document32 pagesDigital Assignment-2 Process Automation and Control Lab LAB SLOT:-L33+L34Goutham KrishnaNo ratings yet
- Ee141 Hw4 SolDocument16 pagesEe141 Hw4 SolVidhya Ds100% (1)
- A Model-Based PI Controller Tuning and Design For Field Oriented Current Control of Permanent Magnet Synchronous MotorDocument7 pagesA Model-Based PI Controller Tuning and Design For Field Oriented Current Control of Permanent Magnet Synchronous MotorRomaric AdamNo ratings yet
- L4Document8 pagesL4Bharath PulavarthiNo ratings yet
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to DisplaysFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to DisplaysNo ratings yet
- Discrete Cosine Transform: Algorithms, Advantages, ApplicationsFrom EverandDiscrete Cosine Transform: Algorithms, Advantages, ApplicationsNo ratings yet
- Modular Forms and Special Cycles on Shimura Curves. (AM-161)From EverandModular Forms and Special Cycles on Shimura Curves. (AM-161)No ratings yet
- RE Quiz-1Document7 pagesRE Quiz-1sneha gupta100% (1)
- Response DB 3Document6 pagesResponse DB 3tanmaya1991No ratings yet
- 2015 Nsucrypto ArticleDocument32 pages2015 Nsucrypto ArticlebayareakingNo ratings yet
- Sprctra FinalsDocument21 pagesSprctra Finalsanembam putobungbong100% (1)
- Best Practices in COMSOL Multiphysics®Document14 pagesBest Practices in COMSOL Multiphysics®Ben D RodriguezNo ratings yet
- Mcs-031: Design and Analysis of Algorithm: Downloaded FromDocument2 pagesMcs-031: Design and Analysis of Algorithm: Downloaded Fromsonia madhwalNo ratings yet
- Lab 5Document3 pagesLab 5Noman Zahoor0% (1)
- Numerical Methods NPTELDocument46 pagesNumerical Methods NPTELAppili Vamsi KrishnaNo ratings yet
- Assembly Line SchedulingDocument25 pagesAssembly Line Schedulingapi-19981779No ratings yet
- Math 131Document1 pageMath 131azizaldebasi1No ratings yet
- Markov Decision Processes (MDP) : Sudeshna SarkarDocument14 pagesMarkov Decision Processes (MDP) : Sudeshna SarkarAnonymous LI2DAcvNo ratings yet
- AlurDocument46 pagesAlurtien.stow.pol.art.muzNo ratings yet
- Volatility Is (Mostly) Path-DependentDocument46 pagesVolatility Is (Mostly) Path-DependentTung Han YangNo ratings yet
- 1 s2.0 S1319157821001798 MainDocument12 pages1 s2.0 S1319157821001798 Mainfachrurozi oziNo ratings yet
- Tic3151 2Document4 pagesTic3151 2api-304236873No ratings yet
- Eric Geriane Bsit 3 Activity 8 A Simple Minimization ProblemDocument2 pagesEric Geriane Bsit 3 Activity 8 A Simple Minimization ProblemErykk GerianeNo ratings yet
- Unit V Fourier Transform PDFDocument53 pagesUnit V Fourier Transform PDFRahul JRNo ratings yet
- Error Control - Polynomial Codes (CRC) : Unit 01.04.02 CS 5220: Computer CommunicationsDocument12 pagesError Control - Polynomial Codes (CRC) : Unit 01.04.02 CS 5220: Computer CommunicationsViswanath KalannagariNo ratings yet
- QUIZ #1 (Basic Calculus) PDFDocument8 pagesQUIZ #1 (Basic Calculus) PDFAbigail CostalesNo ratings yet
- Time Domain AnalysisDocument24 pagesTime Domain Analysisvinviv2222No ratings yet
- ch4 3Document25 pagesch4 3Danie ChâuNo ratings yet
- Profit HRDocument369 pagesProfit HRseminarskiiNo ratings yet
- RUBIK's CUBE BEGINNERS METHOD PDFDocument7 pagesRUBIK's CUBE BEGINNERS METHOD PDFShashank DixenaNo ratings yet
- Consistent HashingDocument2 pagesConsistent Hashinglokenders801No ratings yet
- Bayes' TheoremDocument20 pagesBayes' Theoremasmasaeed18asNo ratings yet
- Unit 2Document60 pagesUnit 2Shashwat MishraNo ratings yet
- Department of Computer Engineering Sharif University of TechnologyDocument23 pagesDepartment of Computer Engineering Sharif University of Technologyahmed salimNo ratings yet
- Insertion Sort Vs Merge Sort in MatlabDocument4 pagesInsertion Sort Vs Merge Sort in MatlabkevindarNo ratings yet
- Design of Anti-Windup-Extensions For Digital Control LoopsDocument6 pagesDesign of Anti-Windup-Extensions For Digital Control Loopsfrank_grimesNo ratings yet
- TD Assignment 4Document1 pageTD Assignment 4Anil ThotaNo ratings yet