You might also like
- Is Placed in Series With The Input Voltage Source in Fig. 4.2. Determine V /VDocument16 pagesIs Placed in Series With The Input Voltage Source in Fig. 4.2. Determine V /Vleelee leeNo ratings yet
- Solution Manual For Process Dynamics and Control Seborg 3rd EditionDocument42 pagesSolution Manual For Process Dynamics and Control Seborg 3rd EditionGregorySmithxocj100% (42)
- Rotational System Transfer Function - Control SystemsDocument55 pagesRotational System Transfer Function - Control SystemsHaris Abbas QureshiNo ratings yet
- Operational Amplifiers and Its Applications: Learning ObjectivesDocument49 pagesOperational Amplifiers and Its Applications: Learning ObjectiveskalyanNo ratings yet
- IntroCtrlSys - Final Exam - 1st Semester - 1920 - Solution PDFDocument5 pagesIntroCtrlSys - Final Exam - 1st Semester - 1920 - Solution PDFTran Nguyen KhangNo ratings yet
- Week 4 Assignment 1 SolutionDocument10 pagesWeek 4 Assignment 1 Solutionkirankuma.jagtapNo ratings yet
- IntroCtrlSys - Final Exam - 2nd Semester - 1617 PDFDocument1 pageIntroCtrlSys - Final Exam - 2nd Semester - 1617 PDFTran Nguyen KhangNo ratings yet
- Laboratory 3 Operating Characteristics of The Control Systems Basic Structures of The Linear ControllersDocument3 pagesLaboratory 3 Operating Characteristics of The Control Systems Basic Structures of The Linear ControllersNastyaRazerNo ratings yet
- Problem Nº1.: S G K G K S SDocument4 pagesProblem Nº1.: S G K G K S SalexandraNo ratings yet
- Assignment NewDocument10 pagesAssignment NewChitra M. chitra.eceNo ratings yet
- Exercise 3 LinearDocument5 pagesExercise 3 LinearWajih AbboudNo ratings yet
- Automatic Control CH7Document48 pagesAutomatic Control CH7廖偉丞No ratings yet
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 pagesAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNo ratings yet
- ControlSystem2 PDFDocument40 pagesControlSystem2 PDFBùi MTriếtNo ratings yet
- Tugas 4 (Inverse Response Chapter 17)Document5 pagesTugas 4 (Inverse Response Chapter 17)PKM KLAMPIS NGASEMNo ratings yet
- Phase Lead Compensator Design Project Mauricio Oñoro: Figure 1 Circuit To Be ControlledDocument8 pagesPhase Lead Compensator Design Project Mauricio Oñoro: Figure 1 Circuit To Be ControlledMauricio OñoroNo ratings yet
- SP025 KMKT SET 1 (SOLUTION)Document11 pagesSP025 KMKT SET 1 (SOLUTION)naderaqistina23No ratings yet
- Seminar 10 - Sol PDFDocument4 pagesSeminar 10 - Sol PDFRaya Najiba TroyeeNo ratings yet
- Control SystemsDocument3 pagesControl SystemsMauricio OñoroNo ratings yet
- Lab No 08: Linear Control System 2016-EE-113Document7 pagesLab No 08: Linear Control System 2016-EE-113SaRosh RaeesNo ratings yet
- Direct and Indirect Self-Tuning Generalized Minimum Variance ControlDocument12 pagesDirect and Indirect Self-Tuning Generalized Minimum Variance ControlSadagopan RajaNo ratings yet
- Worksheet 10Document3 pagesWorksheet 10rahmat qambariNo ratings yet
- Time Domain Analysis of Control Systems: Topics To Be Covered IncludeDocument29 pagesTime Domain Analysis of Control Systems: Topics To Be Covered IncludeRiya ChhabraNo ratings yet
- Chapter 8 Manual OgataDocument53 pagesChapter 8 Manual OgataKalim UllahNo ratings yet
- Logic Circuits and Switching Theory: Number System: Arithmetic OperationDocument35 pagesLogic Circuits and Switching Theory: Number System: Arithmetic OperationKevin Garcia OcceñaNo ratings yet
- EEET2197 Tute8 SolnDocument14 pagesEEET2197 Tute8 SolnCollin lcwNo ratings yet
- Automatic Control CH5Document106 pagesAutomatic Control CH5廖偉丞No ratings yet
- Taller Cuatro Análisis de SistemasDocument5 pagesTaller Cuatro Análisis de SistemasCarlosNo ratings yet
- Lab 3 - Analyze Discrete PID ControllerDocument7 pagesLab 3 - Analyze Discrete PID ControllerDƯƠNG HUỲNH ĐÌNH CHIÊUNo ratings yet
- Pantograph PresentationDocument15 pagesPantograph PresentationAd PatelNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument46 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- Nr-220206 Control SystemsDocument8 pagesNr-220206 Control SystemsSrinivasa Rao G100% (1)
- Two-Degree-of-Freedom PID Controllers StructuresDocument14 pagesTwo-Degree-of-Freedom PID Controllers Structuresbhautik daxiniNo ratings yet
- Control System 2 (Cont of 1)Document13 pagesControl System 2 (Cont of 1)K.Magenthran (UTHM)No ratings yet
- Ipc 18 EndsemDocument4 pagesIpc 18 EndsemnaklidNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument20 pagesController Design Based On Transient Response CriteriaGapuk MaboekNo ratings yet
- Y y T DT Dy y X: 10.450 Process Dynamics, Operations, and Control Spring 2002 Final ExamDocument3 pagesY y T DT Dy y X: 10.450 Process Dynamics, Operations, and Control Spring 2002 Final ExamManoj TribhuwanNo ratings yet
- ENG2016M Tutorial 3 Apr2016 - StudentDocument2 pagesENG2016M Tutorial 3 Apr2016 - StudentSwifty SpotNo ratings yet
- Control Sol GA PDFDocument342 pagesControl Sol GA PDFRishabh ShuklaNo ratings yet
- Final 1Document11 pagesFinal 1hassan salehNo ratings yet
- Simulation and Implementation of Servo Motor Control With Sliding Mode Control (SMC) Using Matlab and LabviewDocument30 pagesSimulation and Implementation of Servo Motor Control With Sliding Mode Control (SMC) Using Matlab and Labviewmjohn87No ratings yet
- Experiment 8 DC Motor Position Control SystemDocument15 pagesExperiment 8 DC Motor Position Control Systemprateek khotNo ratings yet
- Root Locus 2 N. MagajiDocument12 pagesRoot Locus 2 N. MagajiNuraddeen MagajiNo ratings yet
- Control Systems KuestionDocument39 pagesControl Systems KuestionRose KayoNo ratings yet
- EMS507 Lecture 3 - System StabilityDocument21 pagesEMS507 Lecture 3 - System Stability124ll124No ratings yet
- Zero With A Positive Real Part Inverse Response Character: S S K S K K S K S K S K X YDocument27 pagesZero With A Positive Real Part Inverse Response Character: S S K S K K S K S K S K X YCupa no DensetsuNo ratings yet
- Load Frequency Control Via Internal Model Control SchemesDocument25 pagesLoad Frequency Control Via Internal Model Control SchemesRahul PandeyNo ratings yet
- Simultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersDocument8 pagesSimultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersAl-ShukaNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Tutorial II DesignDocument4 pagesTutorial II Designgeofrey fungoNo ratings yet
- Chapter 9: Design Via Root Locus ContDocument16 pagesChapter 9: Design Via Root Locus ContarifulNo ratings yet
- Laboratory 6 Parametric Synthesis of The Control SystemsDocument3 pagesLaboratory 6 Parametric Synthesis of The Control SystemsNastyaRazerNo ratings yet
- Part (A) : A System Is Defined by The Following Block DiagramDocument8 pagesPart (A) : A System Is Defined by The Following Block DiagramsidhantNo ratings yet
- Estimating Circuit Parametrs Using Transfer Function MethodolgyDocument24 pagesEstimating Circuit Parametrs Using Transfer Function MethodolgyRavula Shivarama KrishnaNo ratings yet
- Topic04 Reviewed Add02Document4 pagesTopic04 Reviewed Add02super junlinNo ratings yet
- FEE 411 CAT 2 With Solutions (2021.01.21) by Abdulrahman Abdalla FarisDocument15 pagesFEE 411 CAT 2 With Solutions (2021.01.21) by Abdulrahman Abdalla FarisShadrack KipkemoiNo ratings yet
- Test 2 2017-2018-Skee3133 PDFDocument3 pagesTest 2 2017-2018-Skee3133 PDFumarNo ratings yet
- Effect of Pole and Zero On Stability With ExampleDocument13 pagesEffect of Pole and Zero On Stability With ExampleThulasi ramNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument18 pages16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNo ratings yet
- Chapter 7 System Compensation: (Linear Control System Design)Document35 pagesChapter 7 System Compensation: (Linear Control System Design)Khin AyeNo ratings yet
- One and A Half HoursDocument6 pagesOne and A Half HoursMHUM84No ratings yet
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- 0.6-2.7-Gbs Referenceless Parallel CDR With A Stochastic Dispersion-Tolerant Frequency Acquisition TechniqueDocument7 pages0.6-2.7-Gbs Referenceless Parallel CDR With A Stochastic Dispersion-Tolerant Frequency Acquisition TechniqueMinh KhangNo ratings yet
- CD40174BC - CD40175BC Hex D-Type Flip-Flop - Quad D-Type Flip-FlopDocument7 pagesCD40174BC - CD40175BC Hex D-Type Flip-Flop - Quad D-Type Flip-FlopJose MariaNo ratings yet
- Opamp Lecture PDFDocument163 pagesOpamp Lecture PDFPriyatham KattaNo ratings yet
- Timing Paths: ContinuedDocument18 pagesTiming Paths: ContinuedAnusha ChidagniNo ratings yet
- Constraining Designs 1.0Document17 pagesConstraining Designs 1.0bvrboseNo ratings yet
- Ad 557Document6 pagesAd 557TWChan69No ratings yet
- High-Side Power Switch Ics Spf5017: (Surface-Mount 2-Circuit, Current Monitor Output Function)Document1 pageHigh-Side Power Switch Ics Spf5017: (Surface-Mount 2-Circuit, Current Monitor Output Function)Adrian WongNo ratings yet
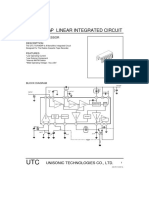
- Utc Ta7640Ap Linear Integrated Circuit: Am/Fm If ProcessorDocument3 pagesUtc Ta7640Ap Linear Integrated Circuit: Am/Fm If ProcessorAlejo Alex CondeNo ratings yet
- HDLSS Numerical Assignments - DOC FormatDocument3 pagesHDLSS Numerical Assignments - DOC FormatNikhil UpadhyayNo ratings yet
- 21CS33 - ADE Question Bank 7876Document5 pages21CS33 - ADE Question Bank 7876AnshulNo ratings yet
- L-4rr-l/EEE Date: 25/09/2022Document50 pagesL-4rr-l/EEE Date: 25/09/2022Nure Alam DipuNo ratings yet
- Eyc Ege SKM 420 GR 20190315Document1 pageEyc Ege SKM 420 GR 20190315zaki abbasNo ratings yet
- Digital Electronics 56d98751129c1Document32 pagesDigital Electronics 56d98751129c1nicolas silvaNo ratings yet
- CC442 Chapter 8 Asynchronous CounterDocument19 pagesCC442 Chapter 8 Asynchronous CounterMuhamdA.BadawyNo ratings yet
- ELT 311 VLSI TechnologyDocument2 pagesELT 311 VLSI TechnologyWaqas AfzalNo ratings yet
- Comm Exp MergedDocument41 pagesComm Exp MergedSajeed RahmanNo ratings yet
- List of EXPDocument16 pagesList of EXPAnkur AgrawalNo ratings yet
- 2500 Controller Start GuideDocument4 pages2500 Controller Start Guidecorey hamiltonNo ratings yet
- HIN232, HIN236, HIN237, HIN238, HIN239, HIN240, HIN241: +5V Powered RS-232 Transmitters/Receivers FeaturesDocument19 pagesHIN232, HIN236, HIN237, HIN238, HIN239, HIN240, HIN241: +5V Powered RS-232 Transmitters/Receivers FeaturesNIKOLAOS NANNOSNo ratings yet
- Beamer TutorialDocument13 pagesBeamer TutorialSoumik SarkarNo ratings yet
- S808 SeriesDocument30 pagesS808 Seriesjl8219No ratings yet
- Digital Integrated Circuits EE 431: Fall 2015 Week 5Document29 pagesDigital Integrated Circuits EE 431: Fall 2015 Week 5Mohamed shabanaNo ratings yet
- Balun DesignDocument6 pagesBalun DesignYouli TianNo ratings yet
- Digital Electronics Chapter 7Document58 pagesDigital Electronics Chapter 7Pious TraderNo ratings yet
- 6.2 Filters BPFDocument26 pages6.2 Filters BPFThanh HàNo ratings yet
- Test1 Question SKEE4643 2021Document2 pagesTest1 Question SKEE4643 2021SUPERB AgentNo ratings yet
- Integrated CircuitDocument14 pagesIntegrated CircuitPablo ArevaloNo ratings yet
- RF Oscillator Design Lab Report: March 2021Document6 pagesRF Oscillator Design Lab Report: March 2021netNo ratings yet