Professional Documents
Culture Documents
SJ Mepla Handbuch Theorie Eng
SJ Mepla Handbuch Theorie Eng
Uploaded by
GigiOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
SJ Mepla Handbuch Theorie Eng
SJ Mepla Handbuch Theorie Eng
Uploaded by
GigiCopyright:
Available Formats
SJ MEPLA
Theory Manual
Version 3.0
September 2007
SJ Software GmbH Aachen
Dirk Bohmann, Dr.- Ing.
SJ MEPLA Theory Manual Version 3.0 Page 2
1 Notations 3
2 Introduction 4
3 Elements 5
3.1 Multi-layered elements 5
3.1.1 Approach 5
3.1.2 9 node multi-layered element 7
3.2 Building of the finite element mesh 8
3.3 Point Fixing 9
3.3.1 Description 9
3.3.2 Approaches 14
3.3.3 Connection of point fixings 16
3.4 Insulating glass units and the gas element 19
3.5 Spring element 21
3.6 Spacer element for insulated glass units 22
3.7 Elastic base 23
3.8 Elastic edge support element 24
3.9 Elastic line support element 24
3.10 Elastic edge beam element 25
3.11 Elastic bonding element 26
4 Basic approaches for calculation 27
4.1 Geometrically non-linear calculations 27
4.2 Contact approaches 29
4.3 Dynamic calculation approaches 30
4.3.1 Mass matrix 30
4.3.2 Newmark procedure 31
4.4 Pendulum body approach 31
4.5 Principal stresses 33
4.6 Equivalent Von Mises stress 34
4.7 Loading approaches 34
4.7.1 Face loads 34
4.7.2 Line loads 35
4.7.3 Concentrated loads 35
4.7.4 Dead weight 36
4.7.5 Temperature constraints 37
4.7.6 Pressure hit 37
4.7.7 Load case calculation 38
5 Comparisions 39
5.1 Convergence study 39
5.2 Pendulum impact onto a pre-stressed glass 40
5.3 Pendulum impact on laminated safety glass 41
6 Notes 42
7 Literature 43
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 3
1 Notations
u midplane displacement vector
w, u, v, φ, θ degrees of freedom
ε strains
σ stresses
ε strain vector
γ shear deformation
γL thermal volume expansion coefficient
D elasticity matrix
B strain matrix
t strain matrix
k shear correction factor
N, M, Q stress resultant vector
N k , Nˆ k shape function for node k
η,ζ local coordinate system
K stiffness matrix
P nodal load vector
U unbalanced residual forces
R reaction force vector
τ shear stress
E modulus of elasticity
G shear modulus
M mass matrix
m mass density matrix
H matrix of shape functions
δ,β stability parameters for Newmark-method
∆t time step length
σ internal forces and moments vector
AR tyre contact area of pendulum (foot print)
RP reaction force for pendulum
mP mass of pendulum
CR stiffness of pendulum body
σh principal stresses
∆T temperature difference
∆H difference of height
V, ∆V volume, volume change
pi0 initial gas pressure
k material density
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 4
2 Introduction
The analyses of multi-layered plates is based on the following assumptions:
1. The deformations except the transverse displacements w are small and the material be-
haviour of each layer is isotropic.
2. According to the Mindlin plate-theory the displacement vector u = [u,v,w]T is expressed
as displacements of the mid-plane of each covering decking layer (i.e. the panes) uo, vo,
wo and independent normal rotations n and θ as:
u = u o(x, y) + zϕ (x, y)
v = vo(x, y) + zθ (x, y) (1.1)
o
w = w (x, y)
n und θ are chosen as constant rotations related to the undeformed system. They are not
necessarily normal to the midplane after deformation, shear deformations are considered.
3. The lateral displacements wo of each layer is set equal to w. Transverse strains εzz are
neglected, so that a plate like stress behaviour will occur, which can be expressed with
internal forces and moments N, M und Q for each layer.
4. The mid-plane displacements for the internal layers are build like (1.1) with
u = u z(x, y) + z ϕ z (x, y)
v = v z(x, y) + z θ z (x, y) (1.2)
w = wo(x, y)
whereby the still to calculate functions for uz, vz, φz and θz result from the continuity of de-
formations of the two enclosing layers.
The layer numbering counts from the bottom and increases to the top layers.
u 2 ( h2 /2) = u 3 (- h3 /2) ; u 2 (- h2 /2) = u1 ( h1 /2)
(1.3)
v 2 ( h2 /2) = v3 (- h3 /2) ; v 2 (- h2 /2) = v1 ( h1 /2)
A sharp bend in the displacements, which will lead to a skip in the layer wise constant shear
deformation, is thereby enabled.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 5
3 Elements
3.1 Multi-layered elements
3.1.1 Approach
The displacements for each layer of a multi-layered element are defined as follows:
z, w y v0
2
n
u0
x
Degree of freedoms for a multi-layered plate
Each node of a n-layered element has 4n+1 degrees of freedom.
u = [w, u1o , v1o , ϕ1 , θ 1 , u3o , v3o , ϕ 3 , θ 3 ,..,θ n ]T (2.1)
t5 n
u o5 5
t4
t3 n
u o3 3
t2
t1 n
uo1 1
z
x w
n
Degrees of freedom for x-direction
The defections w for all layers i=1,3,5, ... are set identical, which is possible as shear defor-
mations are considered.
n
3
~n
(3
z
n
2 Mw
x Mx
n (2
n
1 (1
Shear deformation for the decking layers and the intermediate layer
The displacements uiz, viz and rotations niz ,θiz result from the existing degrees of freedom for
the respectively two enclosing layers.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 6
1 0 ti +1 t
z
ui = ui +1 − ϕ i +1 + ui0−1 + i −1 ϕ i −1 (2.2)
2 2 2
1 t t
ϕ iz = ui0+1 − i +1 ϕ i +1 − ui0−1 − i −1 ϕ i−1 (2.3)
ti 2 2
By considering large deflections the strains will result by derivation the equation (1.1) to
∂ u io ∂ ϕ i 1 ∂w
2
ε =
i
+z + (2.4)
∂x ∂x 2 ∂x
xx
2
∂ vio ∂ θ i 1 ∂w
ε =
i
+z +
∂y 2 ∂y
(2.5)
∂y
yy
and the in plane shear deformation from
∂ u i ∂ vi ∂w ∂w
γ ixy = + + ⋅
∂y ∂x ∂x ∂y
∂ u o ∂ vo ∂ ϕ ∂ θ ∂w ∂w (2.6)
= i + i + z i + i + ⋅
∂y ∂ x ∂y ∂ x ∂x ∂y
and the transverse shear strains
∂w
γ ixz = +ϕi (2.7)
∂x
∂w
γ iyz = +θ i (2.8)
∂y
with i = 1,3,5... for decking plates and zi as co-ordinate between -ti/2 < zi < ti/2.
The internal layer strains i = 2,4,6,... are coupled with the decking plates to build the total
system.
Shear strains of the internal layer (i.e. for x-direction)
∂w ∂w 1 0 ti +1 t
γ ixz = + ϕ iz = + ui +1 − ϕ i +1 − ui0−1 − i −1 ϕ i −1 (2.9)
∂x ∂x t i 2 2
The in-plane and bending stiffness of the internal layers (laminate material) are expressed by
the following equations (i.e. x-direction):
∂ u iz 1 ∂ u io+1 t i+1 ∂ ϕ i+1 ∂ u io-1 t i-1 ∂ ϕ i -1 1 ∂w
2
= - + + +
∂x 2 ∂x
(2.10)
2 ∂x ∂x 2 ∂x 2 ∂x
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 7
∂ ϕ i 1 ∂ u io+1 t i+1 ∂ ϕ i+1 ∂ u io-1 t i -1 ∂ ϕ i -1
z
= - - -
∂x t i ∂x 2 ∂x
(2.11)
2 ∂x ∂x
The internal layers with indexes i = 2,4,6,.. are coupled by the degrees of freedom from the
decking plates with the underlying and overlying layer to build the over all stiffness matrix.
The plate element uses a modified shear interpolation function. These are necessary for
compatibility due to the shear deformations. Followed by the use of deformation derivatives,
non according polynomials would be used. Shear deformation results of the sum MN/Mx and
N, which results in element locking.
Therefore shear deformations will be build with an approach from [7]. These modified shape
functions can be easily calculated for each element and can be taken for each element inte-
gration. The continuity of shear deformation is ensured and locking will not occur.
According to the degrees of freedom, the load vector P allows the following imposed forces:
kn T
P = { Fkz , Fk1 k1 k1 k1 k3 k3 k3 k3
x , F y , M x , M y , F x , F y , M x , M y ,..., M y } (2.12)
The resulting internal forces and moments are referred to the layers. So the multi-layered
element is a combination of a plate element with inplane degrees and a 3-dimensional ele-
ment, where transverse strains εzz are not regarded and the deflections (u, v) are set con-
stant or linear (zAn, zAθ) for each layer.
3.1.2 9 node multi-layered element
The here used isoparametric element is build with 9 nodes, using the Lagrange - shape in-
terpolation functions:
4
7
3
>
8 9
0 6
1
5
z y 2
x
9-node element, definition of nodes
Integration order:
3x3 = 9 gaussian points, (full integration)
Use of modified shear interpolation functions
Degrees of freedom:
The number of degrees of freedom for each node of one element with n-layers (one pack-
age) is 4n+1:
u = { w, u , v , ϕ , θ , u , v , ϕ , θ ,..,θ }
o
1
o
1 1 1
o
3
o
3 3 3 n
T
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 8
Load vector:
Load vector for each node of each package:
kn T
P = { Fkz , Fk1 k1 k1 k1 k3 k3 k3 k3
x , Fy , M x , M y , Fx , Fy , M x , M y ,..., M y }
Element building, order of layer numbering:
The number of layers must be odd, as two decking plates must enclose one intermediate
layer. The count ordering of layers begins with 1 and increases to the top layer 3,5,7,... If
more than one package (multi-layered laminated glass panes) is given, the element layers
will be continued for the next package, then including the gas volume in between (insulation
glass). Each layer is described with the young's modulus, the thickness and the poisson’s
ratio.
3
2 package 2
1
SZR intermediate space
5
z 4
3
layers 2 package 1
1 t
Order of layers and packages
Stresses:
For each layer the stresses on the top and bottom faces σxx, σyy, σxy of each the glass panel
are calculated. These stresses are declared in SJ MEPLA with the following convention: Sxx,
Syy und Sxy (Components in x, y- direction and shear stress in plane).
Transverse shear stresses are used and calculated in this program, but will not be given in a
resulting output.
Principal stresses are calculated in gaussian points by the following formulae
σ xx + σ yy ( σ xx - σ yy )
2
σ (+,-)=
h
± + σ 2xy
2 4
and are identified in the program by Sp+ und Sp- (principal stresses +,-).
3.2 Building of the finite element mesh
The finite element mesh is formed by a free meshing algorithm. On the basis of any outline
contour, the finite element mesh is automatically produced on the inside of any contour. Be-
side from straight outline edges, also circular curved edges can be described.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 9
The formation of holes is done in that way that an additional edge inside the system is de-
scribed, in order to build the inside hole and then on the way back this additional edge will be
closed again. Such additional “stitched up” edges are not regarded as system edges.
The mesh refinement is controlled via the given element size.
Remark:
This in the program used element size will be determined parallel from the smallest edge
length, which was set to describe the outline contour. If a system edge (e.g. a small circular
rounded corner) with a very short length (e.g. 30 mm) was set, then a very fine mesh with
elements, with 30x30 mm of edge length, are produced, so that the circular corner can be at
least formed by one element!
The following basics must be regarded to describe the system contour:
- The input of the contour lines must take place against the clockwise direction.
- The edge lines may not over-cross. This applies also to the circular edges.
- If circular contour lines are described, the following border point must lie on this circle.
If this is not the case, then “autocorrection” can be used to generate the correct situa-
tion of this point. The actual position of this point is shifted in radial direction to be-
come a point lying on the circle.
- The building of cutouts or any holes on the inside of the structure is formed by addi-
tional contour lines, which must be closed on the way back with a second contour line
with accurately same coordinates however in opposite direction. These doubly how-
ever parallel in the opposite direction running edges, are the only exception for
attaching contour lines.
Remark:
Sometimes it can occur that the finite element net cannot be formed correctly. In these cases
the element size must be changed to accomplish a renewed meshing attempt.
3.3 Point Fixing
3.3.1 Description
The glass fixing element is a combined element between the multi-layered element and the
further use of one new node with 5 degrees of freedom. This node is introduced at the base
point (or rotation center) of the point fixing (point where the springs are applied). The core of
the fixing made from steel is set undeformable (blue region). So core deformations are not
considered due to the rigid body approach. But the elastic properties of the imbedded circular
disk pad (shim) (hs, red region) and the bush or the protective layer at the contour edge
(green region) to prevent direct glass-steel contact, are considered within this point fixing
element.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 10
rk
th
ri
hk
z
y
x hs
zh
ra Cx
Cy
C : Drehsteifigkeit um y-Achse
C : Drehsteifigkeit um x-Achse Cz
Definition of point fixing element with rotational stiffnesses Cφ and Cθ
The supporting stiffness of the fixings base point is mapped by 5 springs. Cx, Cy, Cz for stiff-
ness of translation in x, y and z-direction and the rotational rigidities Cφ and Cθ for rotation
about the y- and x axis!
By use of the distance Zh (down, against z-direction a negative value) an eccentric loading of
the supports may be considered, as the springs are applied to this base point and the reac-
tion forces will there be transferred. Stiff or fixed boundary conditions may be set by use of
high spring rigidities like 1.e6 N/mm and 1.e10 Nmm/rad for the rotation springs. Shall only
translation be forbidden and rotation be allowed, the rotational rigidity must be set to Cϕ = Cθ
= 0 Nmm/rad. The base point of the support must therefore be set by the z-ordinate to the
position of the rotation center, while no rotational rigidity is set.
Using this springs the elastic behaviour of the underlying structure or special mechanisms
like a ball-shaped head can be considered.
Within this program 7 different kinds of fittings can be used:
Type 1: Countersunk fixing
Type 2: Disk fixing
(New in version 3.0:)
Type 3: Circular clamp fixing
Type 4: Angular clamp fixing
Type 5: Circular downholder
Type 6: Angular downholder
Type 7: Bonded fixing without building of holes
1 3 5 7
2 4 6
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 11
Type 1: Countersunk fixing
rk
ri th
Eh hk
+z
ts
Es
Zh
ra
Cx
Cz
The counter sunk head always lies aligned with the highest glass panel. In the program it can
be selected only the conical range or also the cylindrical range of the bushing is lying in con-
tact to the glass and thus can introduce forces into the pane.
Type 2: Disk fixing
ri
ts
Eh
+z
ts
Es
Zh
ra th
Cx
Cz
The disk fixing exhibits two separating disk pads (red) on both sides of the surface. The disk
layer (green) transfers thereby the forces into the faces of bore hole; the plate layer (red)
transfers the forces, which only act perpendicularly to the glass.
In this program SJ MEPLA it can be chosen, which glass layers shall lie in direct contact to
the faces within the borehole. For filled in boreholes (e.g. plastics filling material, green re-
gion) can be set, that for all faces within this borehole loads can be transferred. This possibil-
ity enables to consider the manufacturing method, that usually only one borehole is drilled
with the correct diameter and additional above lying holes have greater holes. Such it can be
ensured, that after lamination the bush can be inserted. The load then only can be trans-
ferred via the defined panel.
Type 3: Circular clamp (balustrade clip)
th
ts
Eh
+z r
ts
Es
Zh Cx
r
Cx
Cy
Cz
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 12
This clamp support exhibits a round, circular design. The load transfer takes place in the
same way as the disk fixings, via the flexible intermediate layers within the clamping, which
separate the glass edges and the surface from the metallic part.
Eccentricities from the distance of the base point Zh are considered. When a position for the
clamping is set, which is not exactly lying at the border lines, the resulting eccentricity in x,y-
direction (distance to the border) is regarded.
Type 4: Angular clamp (balustrade clip)
th
ts
Eh
+z b
ts
Es
Zh Cx a
b
Cx
Cy
Cz
Instead of a circular clamping, an angular design can be chosen. This form is defined by “a”
and “b” which describes the half width and the depth. The radius for the corner rounding is
done automatically and can not be changed.
The shape of the finite element mesh, is formed from diophantical curves, thus ellipses of 4th
order. The mesh is build with two dense rows of elements inside and two outside the clamp-
ing. The inside of this mesh is meshed automatically.
Type 5: Circular downholder
Es
ts
+z r
r Zh
Cx
Cx
Cz Cy
The circular downholder corresponds to the circular clamp support, only that this can intro-
duce forces from above (thus in negative z-direction) and no forces into the edges can be
applied. This downholder can thus be used as suction protection. So that the downholder
acts only in one direction for compression, the contact for the interfaces must be marked.
When contact isn’t marked, the downholder acts for compression and suction like bonded!
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 13
Type 6: Angular downholder
Es
ts
+z b
b Zh a
Cx
Cx
Cz Cy
The angular downholder is equivalent in function to the circular downholder.
Type 7: Bonded disk fixing
+z
ts
E s ;G s
Zh
ra
Cx C,C
Cz
The bonded disk fixing can only be set from fro one side (below) onto layer 1 of package 1.
The characteristic of this fixing lies in the fact that here no hole is produced. In contrast to the
other point holders, here for the interface (adhesive film) the elastic module and the shear
modulus are to be defined.
Building of the mesh:
The glass point fixings need for integration a special finite element mesh, where the rubber
disks and the edge- and borehole separating layers can be fixed. This mesh is generated
automatically depending on the mesh density.
The fixings of type 1,2 and 7 can’t be set too near the border (distance greater than 20 mm).
Otherwise a mesh can not be build.
The clampings 3 to 6 can only be set at the borders. When they are located farther than 70
mm from edges, they can’t be generated and an error message will appear. If they are posi-
tioned within this region, a perpendicular will be dropped to the border line, in order to specify
the position at the disk:
Clamping with offset to the borders
The arising offset (see picture) is considered in the calculation.
When a clamping or downholder shall be set onto corners, this will only be done if
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 14
a.) a circular form is set (type 3 or 5), and
b.) the given distance to the corner is less than 30 mm.
In any case the given position is modified to lie exactly at the corner position. An offset can
not be regarded! That means, the point fixings base point (the position of the axis, where the
springs are connected) is modified in the program and will always be equal to the given cor-
ner position! A corner position is formal equal to a contour point, ever when no corner has
been build!
Remark:
Against the simplified illustration in the “graphic surface” the clampings of type 3 not only
clamp the top and bottom faces of the glass!
The two glass edges in the corner are as well supported at the edges over the glass thick-
ness with the (green indicated) separator.
The number of elements, which will be build around and within the point fixings, depends
upon the chosen element size. When small element sizes are used, the density and the
amount of elements will be very high, accompanied with higher efforts for solving the equa-
tion system.
3.3.2 Approaches
All elastic properties of the elastic separators are considered when assembling the stiffness
matrix. According to the young's modulus, the thickness of the disk pads (shim) and the
properties of the bush and edge separators, the stiffness matrix is assembled by integrating
over the volume.
Hereby special properties are set for the separating layers:
Only forces perpendicular to the glass surfaces can be transmitted to the supports (except
type 7). There is no shear transfer between the glass and the separating layers. These layers
only can slide over the glass faces where the materials are touching. This is the most accu-
rate approach, which is possible without taking contact-algorithms into account. The bush
and shim may only be stressed through perpendicular forces.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 15
E bush
loaded area
steel E =
glass panels
z
E shim
steel E =
eccentricity (-)
point fixing node
(5 degrees of freedom)
Force transmission for countersunk fixing
steel E =
E shim
E bush
steel E =
z glass panels
E shim
steel E =
eccentricity (-)
point fixing node
(5 degrees of freedom)
Force transmission for the disk fixing
This approach will give most accurate stresses at the drilling rim, without to pursue a great
effort with interface-elements. In this case (without contact approaches for the touching
faces) no iterations are necessary and the equation system will be solved in one step; but
then perpendicular tensile forces may arise.
In case of calculations with contact approaches (section 4.2) the contact problem will be sim-
plified, as only one stress direction must be regarded in this approach. This describes the
most realistically calculation, as tensile stresses may not occur at the surfaces, the bush and
edges. Only compression forces will arise due to the possibility of separation.
The bonded disk fixing forms an exception:
The adhesive film can transfer normal stresses as well as shear stresses. Additional this (as
well type 3 and 5) can be set to bear torsion.
=0
For that purpose a degree of freedom for rotation around the z-axis has been added. This
property can be set with “free” or “stiff” behaviour of z-rotation. But, if such a fixing is con-
nected using a bar and not with 5 springs, it will always be set to free rotation. The default
(unmarked) setting is stiff for rotation!
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 16
Special note:
With this multi-layered element approach, the definition of the countersunk fixing of type 1 is
underlying a simplification, which will lead to good results, when the chamfer at the drilling
rim is small compared with the thickness of the pane. The loads acting onto the chamfer are
considered at the correct place, but bending and in-plane stresses in the pane are not influ-
enced by the chamfer. This is founded by the fact, that this element approach may not con-
sider the real chamfer like volume-elements can do. The chamfer really exist but will be
treated as a stress free region.
The double sided disk fixing is not underlying this restriction.
Point fixings in insulation glass:
When point fixings are used in insulating glass units, a spacers will automatically be inserted.
His properties are taken form the definition within in spacer card. The spacer is aligned in
between the gap with the predefined gap height. (see section 3.5)
Spacer at the borehole rim
The elastic and mechanical properties of the spacer is inserted directly at the rim of the first
element row with the borehole to connect the glass packages.
Load transferring at the borehole rim:
The definition which layer shall lie in direct contact to the bush of a disk fixing (type 2), is re-
lated only to the lowest glass package 1. When here a layer is set to transfer loads, other
packages then don’t have touching faces between the glass and the bush.
When the conic face of a countersunk fixing (type 1) is defined as the only contact region,
then no other layers are regarded with touching faces to the bush! The conic face except the
disk pad then is the only force transmission area between the glass and the fixing.
All other point fixings with edge separators (type 3 and 4) are always considered to lie in con-
tact to all glass edges of every layer and package, like it’s shown in the pictures.
3.3.3 Connection of point fixings
The point fixing element is formed from one additional node with 5 degrees of freedom. The
deformation is described with 3 translation and 2 rotational degrees of freedom at the fixings
base point. A rotation about the transversal z-axis of the point fixings is not considered for
type 1,2,5 and 6. The steel body, build from the spike, the disks and the taper shank, is set
as a rigid body. The eccentricity between the base and the lower bottom face of the panes
will be considered and is defined by the distance Zh. (negative value, if the base point lies
under the pane)
The displacements and rotations are described with springs, acting at this additional node or
by definition of a directed bar or rod. This springs represent the stiffness of the sub-
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 17
construction or the design of the supports (e.g. balled shaped head). The 5 springs are fixed
to the ground.
High rigidities for the springs represent a fixed boundary condition, which is nearly unde-
formable (e.g. Cx = 1.e6 N/mm), but these high stiffnesses can’t really arise (1 MN or 100
tonnes will lead to a deformation of only 1 mm!). A stiff rotation spring may be defined using
1.e10 Nmm/rad, but not more! Low rigidities as C = 0.0 will form a free moving or rotation.
Setting values exaktly to zero, may leed to problems when contact conditions shall be used.
In this case after releasing the contact, the point fixing may become kinematically, what can’t
be solved. In such cases it will be better to use low stiffness values, that prevent moving or
rotation of a deattaching point fixing!
Using only point fixings as supports, the a static determined system must also be observed.
Forces acting directly to the point fixings are not possible to give! The fixings may only be
loaded through the panes.
In case of a tension rod, only normal forces and no bending can be transmitted. The two end-
ings of the tie bar are fixed using hinges.
Zo
Z
Y X
Xo
Definition of the tie bar position
The rigidity will be described by the young’s modulus E and the cross section area A. With
these values the spring stiffness will be calculated. An eccentricity within the point fixings
definition will introduce bending forces into the panel, when the basic point (defined by Zh)
doesn’t lie exactly within the midplane of the glass package. Due to the load directions, the
pane must be fixed as well in pane direction to prevent moving. In the above example, face
loads will lead to Y-forces within the pane, so that the edge along the x-axis must achieve a
boundary conditions acting in Y-direction.
A possible buckling – nor in the case of a non-linear calculation - of the bar is not considered
and must be carried out by hand calculation.
The introduction of forces directly into the point fixing is not possible. They can only be
loaded indirectly.
Degrees of freedom:
5 degrees at the base point, (u, v, w, ϕ, θ)
Input:
- point fixing dimension and position in the glass panel
- type of fixing (type 1 or 7)
- material properties for the disk pad, the bush and edge sparators
- 5 spring rigidities [N/mm] and [Nmm/rad]
or
- connecting a bar to the ground with definition of the young’s modulus E and the cross
section area A.
Output:
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 18
- 5 displacements and rotations u, v, w and φ, θ
- 5 spring forces (Fx, Fy, Fz and Mφ, Mθ)
or
- FStab Normal force in the bar
The option LITEWALL:
Using this LITEWALL ISO point fixing, not all glass packages will be clamped. Only the low-
est package No. 1 will be fixed. All higher packages are free and not connected with the point
fixing. As well the spacers, which are normally implemented automatically are no longer in-
serted between the packages. The total glass system is selectively fixed only by holding the
first glass package.
With this approach some specialties are combined:
Due to the FE-basis of this program it’s not possible to remove the hole in the outside panels
for this kind of calculation. The outside holes (in all packages > 1) aren’t really existing. The
global behaviour of the panels doesn’t change, when the holes are small in comparison to
the pane area. But at the outer bore hole rims now some stress concentrations will arise,
which aren’t really there. So you can’t read out only the maximum principal stresses out of
the protocol – you must explicitly read the stresses using the <local stress output> or by
selecting the needed stresses in the graphics surface via mouse.
When there is need to get the stresses in the region of the holes, you must carry out a sec-
ond calculation. From the first calculation you can get all deformations and stresses exclud-
ing the region of the holes of the outside packages. From the second calculation you can get
the stress results in the hole region (packages > 1). Therefore you must replace the point
fixings with normal local springs or use the bonded disk fixing (type 7), which is as well only
attached from the bottom to package 1. Then no hole will be generated. But now you have to
regard either
a.) the bad modelled finite element mesh in case of as used single spring, or
b.) the not considered hole within the first package, where now the stresses doesn’t
show a stress concentration.
The second way b.) is the better approximation!
The LITEWALL point fixing has a slightly unsymmetrical layout. As in our program only
symmetrical bodies can be regarded, the stiffness and thickness of both separating disks has
been averaged, to fit to our approaches (see the database in program). In addition you have
necessarily to regard a special construction of this glass fixing: The laminated glass panels
will only transmit forces from the fixing to the outside layer 3 across the bush, using separat-
ing ring made of plastic. This fact must be regarded by selecting the option “only glass layer
3 touches the bush”.
For help, the usual values for the stiffness values of the bolt Cx to Cθ and the typical Zh value
are given:
LITEWALL ISO
Zh = ca. -80 mm
Cx, Cy, Cz = 2320 N/mm
Cφ, Cθ = 4.95·106 Nmm
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 19
This option LITEWALL is only designed for the use of specialists. We will give no guaranty
for our predefined geometric and rigidity values. When you are unsure, ask the manufacturer
for further information.
3.4 Insulating glass units and the gas element
The approach for the multi-layered elements allows the calculation of insulation glass due to
the change of gas pressure by use of the gas-equations. With this element description with
varying layers, the behaviour of the gas in between the panes can be correctly considered for
any design. Due to the same topology of the mesh for all layers, this allows the correct inte-
gration of the gas stiffness by the gaussian points.
pe
intermediate space
volume Vo
w
gas pi
w
insulation element pe
Insulating glass unit element
Every pane package has it's own degree of freedom in z-direction. The change in volume
due to deflection of each pane may therefore be correctly integrated.
In consequence to the high non-linear gas law, the equilibrium solution is build through itera-
tions. The rearrangement of the gas volume, caused by the deformation of the panes, are
considered. With this approach, pressure non-conforming loads (point loads and bearings)
and geometrically non-linear behaviour of the panes can be calculated all together in one
load case.
Here are to name:
- large displacement approaches
- insulation glass with laminated glass panes
- any geometry
- any combination of pressure loads, point loads, dead weight,...
- pendulum impact on insulating glass units
- climatic loads like temperature change, barometric changes,...
- loads due to temperature changes in the gap
- point fixed insulating glass units
From the gas law
pi ⋅ V = konst
and the volumetric change of the initial volume V0 from of temperature changes
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 20
V = V 0 (1 + γ L ⋅ ∆T)
with
(L : thermal volume expansion coefficient
∆T : temperature change of the filling gas
the resulting gas pressure of a deformed insulating glass unit
0 V 0 (1 + γ L ⋅ ∆T)
pi = pi
V 0 + ∆V
with
pi0 : initial pressure during production
∆V : volume change
can be calculated.
The change in pressure due to the differences in assembling- and production height may be
considered by
∆ p H = 12 ⋅ 10-6 ∆H
with
∆H : difference of height [m]
for heights up to 1000m [51], when the real barometric outside pressure is unknown. The
resulting difference in pressure is in SJ MEPLA automatically subtracted from the external
(outside) pressure.
The iterations are performed by use of the Newton-Raphson iteration procedure. If necessary
the tangential stiffness matrix (also the gas stiffness) is build, to enhance the solution proc-
ess.
If linear calculations are performed, the stiffness matrix is only once assembled and used for
all further iterations. Although with this procedure more iterations must be carried out, the
solution takes less time, as the equation system only once must be triangulated (section 4.1).
When convergence can not be achieved, a new assembly of the stiffness matrix and equilib-
rium solution is performed.
There are up to 4 glass packages possible. (3 internal intermediate spaces with gas)
Input:
- external (outside) pressure pe [N/mm²]
- internal gas pressure pi [N/mm²] for each intermediate space
- temperature difference in intermediate gas space as difference between installation and
assembly temperature ∆T [C°]
- height difference between assembly and installation ∆H [m]
- any loading (like pressure loads, point loads, dead weight,..)
- tolerance values for insulation pane contact [mm], (section 4.2)
Output:
- internal pressure in each intermediate space
- stresses in the spacers sealing
The difference of height must only be set, when the insulation glass is not filled with gas at
side. In this case ∆H can be set to zero.
Special note:
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 21
The edges of insulated glass panels must be intermediately fixed or symmetry conditions
may be used. Therefore 2 methods are possible:
- The use of the boundary condition with type 0, which will simply support all packages at
the given edges and fix them in this way to a constant distance.
- The edges may be connected by spacers with elastic/rigid behaviour. Then distance
changes in dependency of the defined material properties are possible. In addition as
well beams may be selected at the same edges, so that no edge supports (type 0 - 7) are
necessary.
3.5 Spring element
Any desired springs may be set at any position within the pane area. These springs operate
in 5 the dimensions for moving x, y, z and rotation ϕ and θ. Spring rigidities for x- or y- direc-
tion only acts on the lowest layer of each package. Rigidities in z-direction take effect on all
layers due the element convention (Each layer of a laminated safety pane has the same
transversal degree of freedom). Rotational rigidities are applied only at the first layer. All of
these springs operates between the plate and the ground.
With this possibility fast calculation for point supported panes may be carried out, when local
effect at the supports are not of interest.
In SJ MEPLA they are used for statically determination. A pane simply supported (bearing
type 0) must be prevented for translation in plane direction. Therefore a proposal is done in
program for each pane package:
- The first corner point receives 2 springs in x- and y- direction.
- The second corner point receives 1 spring in y- direction.
Cx
1 2
z
y
Cy Cy
This proposal may naturally be removed when other kind of bearings are necessary.
Cz
Supports at the corners may be applied as well.
The precision of the stress calculation depends as always on the mesh(element) discretisa-
tion.
Degrees of freedom:
no own degrees of freedom (coupled between plate and ground)
Input:
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 22
- position of springs in x-y coordinate system
- rigidities in x,y, and z- direction Cx, Cy und Cz [N/mm]
- rotational rigidities for Cϕ , Cθ [Nmm/rad]
(Rigidities of 1.e6 N/mm (1 MN/mm) denote nearly no movement possibility; rigidities of zero
will define no acting spring directions)
Output:
- displacement u, v, w [mm] and φ, θ [rad]
- spring forces Fx, Fy, Fz [N] and Mφ , Mθ [Nmm]
3.6 Spacer element for insulated glass units
For the calculation of point fixed or unsupported edges in insulation glass units the embed-
ment of spacers in between the panels (packages) are necessary. With these spacers the
panels are coupled at these edges. When the pane borders are supported by the boundary
condition type 0 (simply supported), this approach will act onto all packages and therefore
the distance is fixed. For free edges in insulation units (without any kind of lateral support) a
spacer must be regarded to connect the edges and to prevent a free opening.
For this purpose the spacer may be set very stiff (rigid), so that neither opening nor closing of
the free edge is possible. This property is controlled by the modulus of elasticity and the
width of the silicone sealing and acts in z-direction (lateral relative displacement).
E, G
b
In addition to that, the shear resistance may be controlled via the shear modulus G.
Therewith the panes are coupled in plane direction and the panes are statically determined
without any need of additional springs to prevent in plane movement.
The height of the spacer depends on the air gap height and is set automatically.
Mechanically these properties will be insert over the border lines of the 2 involved 9- node
elements. The stiffness matrix of the spacer is produced by numerical integration over 3
gaussian points and is added to the total stiffness matrix with what both edges will be cou-
pled. When 2 or 3 air gaps are present, the same will there be done with the properties for
this defined edge.
In extension the spacer may act non-linear:
When non-linear behaviour is chosen, the distance change is non-linear controlled. When
enlarging the distance the behaviour is linear due to the given elasticity. When the distance is
shorten the material becomes stiffer and prevent a change in distance. The maximum rigidity
is reached when the deformation due to compression is larger than the tolerance value. This
represents a rigid body for the spacer (intermediate frame), which will not transversal deform.
A constant distance may also be set by a high rigidity for the sealing material. This is rea-
sonable, when the edges are embedded in frames which will prevent opening and the frame
stiffness shall be regarded as well with the beam possibilities (section 3.8). Then there is no
need to consider contact conditions.
The selected spacer property settings will automatically be taken for the borehole rim, when
point fixings are used.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 23
When the young’s modulus is changed, the preset shear modulus G will be modified. The
standard value of zero for no shear transition (which is not allowed in Germany to set into
account) is set new to G = E/3! This value must be changed, when shear effects shall not be
regarded!
Degrees of freedom:
no own degrees of freedom (coupled in between the packages of an insulation glass)
Input:
E [N/mm²]: modulus of elasticity (in z-direction)
G [N/mm²]: shear modulus G (in x,y- direction)
b [mm]: width of silicone sealing
edge number: panel edge, which will get a spacer
contact tolerance:
non linear behaviour for tension and compression (compression: no change in
distance, tension: deformable due to the given properties e.g. silicone)
Output:
- maximum stresses within the spacers sealing material
- symbols for the spacer in the graphics surface
Special note:
- Bending rigidity is never regarded for the spacers (no bending of the frame profile or the
sealing material).
- For point fixed insulated glass (except for LITEWALL), these properties will automatically
be used at the bore hole rim.
3.7 Elastic base
The elastic base element acts on the bottom side of the lowest plate panel (layer 1 and
package 1). This behaviour is integrated over the elements (9 gaussian points) resulting from
the stiffness out of C = EA/h and is inserted into the global stiffness matrix. For this elastic
base the effects from the lateral contraction is neglected (< = 0) and the calculation can take
place using a kind of springs, which acts only in transversal direction. With this approach no
rearrangements in the elastic base can be considered. (e.g. When the material is com-
pressed at one position, this will have no effect to the strains at places aside.)
h
E
Contact condition can be chosen as well:
When the lateral displacement w exceeds the assessed tolerance, the panel will detach from
the elastic base, so that no compound will exist any more. When the ground is compressed
the contact is sustained.
Degrees of freedom:
no own degrees, (coupled between ground and bottom face of the panels)
Input:
E [N/mm²]: modulus of elasticity (in z-direction)
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 24
h [mm]: height of elastic base
contact tolerance [mm]:
detachment from the base material, when no compression forces are acting
Output:
no output, only symbols of spring kind a plotted in the graphics surface
3.8 Elastic edge support element
When the edge of the plate shall be elastically supported, this will be done by elastic edge
support elements. In dependency of the defined underlying supporting structure (e.g. a rub-
ber bearing) the stiffness is calculated and integrated at 3 gaussian points in z-direction due
to the young's modulus, width and height along the element border. When the shear modulus
G is set as well, this will act as a bonded edge (structural glazing).
E,G
h
In addition, contact approaches can be considered, so that lifting corners may occur. In this
case the shear modulus is set to zero, so that lifting can appear!
Degrees of freedom:
no own degrees of freedom (coupled between layer 1 of package 1 and the ground)
Input:
E [N/mm²]: modulus of elasticity (in z-direction)
G [N/mm²]: shear modulus (action in x- and y-direction)
b [mm]: width of the elastic profile
h [mm]: height of the elastic profile
contact tolerance [mm]: distance change, when separation shall take place
Outputs:
- Reaction forces Fz, Fx and Fy for each line
- stresses in x-, y- and z-direction
- symbols in the „graphics surface“
3.9 Elastic line support element
The elastic line supports analogously operate like the elastic edge supports, but can be set
anywhere within the pane and acts only in z-direction. The edge supports are integrated
along the border of the elements using 3 gaussian points. The line supports are generated in
a different way: The supporting line is defined by two points, which mark the beginning- and
ending point of the set line. Along this line equally spaced springs are applied, which acts
between the pane and the ground. The spring rigidity is calculated by C = E·A/h, whereby the
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 25
area A is build form the spacing for each spring and the width b of the underlying elastic pro-
file.
b E
The stiffness matrix is assembled by adding each spring, so that the integration in this case
is done by summation of these segments. This spring rigidity only acts in z-direction. In plane
movement is not suppressed and the plate may slide over this kind of bearing.
Degrees of freedom:
no own degrees of freedom (coupled between layer 1 of package 1 and the ground)
Input:
Point 1: x, y- coordinate from the start point
Point 2: x, y- coordinate from the end point
E [N/mm²] modulus of elasticity (in z-direction)
b [mm] width of the elastic profile
h [mm] height of the elastic profile
contact tolerance [mm]: distance change, when separation shall take place
Output:
- reaction forces Fz for each line
- maximum stresses σzz
- symbols in the „graphics surface“
3.10 Elastic edge beam element
The elastic edge beam element is a reinforcing element, which will be overlaid at the borders
of the 9-node elements. The displacement approaches for this beam element corresponds to
a 3-node curved beam element with shear effects. That no new degrees of freedom are nec-
essary, this beam element is build only with a bending rigidity and has no torsion stiffness. In
this way the pane can freely rotate transversal to the beam axis. The behaviour is equivalent
to a simply on an beam supported pane. The length of beam is related to the length of the
selected edge, where the beam is located. The support conditions of the beam beginning (A)
and ending (B) depends on the degrees of freedom for the there lying nodes. When the en-
closing system edges are simply supported, the beam must use this supports at it’s endings.
It’s only possible to remove additional degrees of freedom, to set clamped beam endings.
The boundary condition is set using the same type of bearings used for the edge supports
(type 0 to 7). The direction from (A) to (B) is defined counter-clockwise such as the system
contour has been given. Elastic beam supports may be combined with springs at any posi-
tion.
B
E, I, A
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 26
According the involved elements which shall be reinforced with a beam, the edges are de-
termined. Along these sides the beam element is build using the 3 nodes of this side and
integrating over 3 gaussian points. These edges may also be curved (see special note). This
additional stiffness acts only on the lowest package and layer. Similarly, normal and torsion
forces can't be transmitted, as only a bending and shear stiffness exists in the beam. Be-
cause the density must be given too, the dynamic response of the swinging beam and the
loads due to the dead weight are considered in calculations.
Degrees of freedom:
no own degrees of freedom (reinforcing element)
Input:
E [N/mm²]: modulus of elasticity
I [mm4]: moment of inertia
A [mm²]: cross section area
ρ [t/mm³]: density
Outputs:
- location and values for maximum and minimum bending moments
- visualisation in the graphics surface
Important note:
This beam approach is only exact when a the beam is straight or slightly curved. When the
edge beam is used for circular borders, the interaction between bending and torsion is ne-
glected, as the beam has no torsional rigidity! A bending moment results also in torsion mo-
ments when a beam is curved – due to the used approach, this can’t be considered!
3.11 Elastic bonding element
The elastic edge bonding is mathematically used in the same way like the elastic edge sup-
port. The elastic edge bonding is set at the edges with the thickness of each glass panel. The
width of the bonding material is given by “b”. The young’s modulus E and the shear modulus
G describe the elastic behaviour normal and transverse to the edge.
E ,G
When the shear modulus is set to zero, the shear behaviour will be ignored. Such, only nor-
mal forces perpendicular to the glass edge can be transferred. The resulting stresses exhibit
thereby a characteristic:
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 27
Fnz
Fnt
Fnn
The stress components and their associated forces are related to the local co-ordinate sys-
tem along the edge! Such, the stresses σnt and σnn are components tangential and normal to
the edge. Theses stresses can only be compared with the global stresses σxx and σxy when
the global co-ordinate system is parallel to this local system. The component σnz is the shear
stress acting in z-direction and will result in forces Fz.
Degrees of freedom:
no additional degrees of freedom
Input:
E [N/mm²]: Young’s modulus of elasticity
G [N/mm²]: Shear modulus of elasticity
b [mm]: Width of the bonding
Output:
- Reaction forces Fnz, Fnt und Fnn for each border and layer
- maximum and minimum stresses σnz, σnt and σnn
- Symbols within the graphics surface
4 Basic approaches for calculation
4.1 Geometrically non-linear calculations
The layer wise approach leads to membran forces (in plane normal forces), which are nec-
essary for equilibrium. For large transversal displacements the plate stiffness will be in-
creased due to the arise of internal membran effects. They results from changes in length
referring to the undeformed system.
Regarding the deformation of a section dx, which is rotated by w',
w
du
dx +
w´
w w + w´ dx
x
dx
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 28
the following formulae
∂w
2
dx + du
= 1+ (3.1)
dx ∂x
results. In second approximation the strains then result
∂u 1 ∂w
2
ε xx = + (3.2)
∂x 2 ∂x
and analogously
2
∂u 1 ∂w
ε yy = + (3.3)
∂y 2 ∂y
∂u ∂v ∂w ∂w
ε xy = + + (3.4)
∂y ∂x ∂x ∂y
Solving this non-linear equations must take place with iterative procedures. The initial stiff-
ness matrix Ko, the tangential matrix Kt or combinations of both may therefore be used. The
first procedure with Ko has the advantage, that the stiffness matrix only once must be as-
sembled and can be used for further iterations. This is very fast, as the matrix triangulation is
the most time consuming process. But bad or no convergence may occur using only this way
for non-linear problems. The second solution with a tangential stiffness matrix is accompa-
nied by good convergence but high computational effort, as for every iteration the stiffness
matrix is build anew.
In SJ MEPLA a combination of both methods is used: If a given convergence ratio will not be
achieved by use of a constant stiffness matrix, the over all tangential stiffness matrix is build
anew and is used for the next iterations. This procedure may be turned off by the button
<disable automatic>. Then the stiffness matrix is build and solved every iteration, what
takes much more time. An other possibility is to apply the loads in several steps to the sys-
tem. Any loads like pressure, point, gravity and climatic load are subdivided and applied to
the system in x steps using the button <apply loads in x steps>. The solution of the system
in this case is the last step. This card can not be used for the dynamic pendulum impact
calculation!
The tangential stiffness matrix is build out of 3 components. The initial stiffness Ko for small
deflections, the non-linear matrix Knl for large displacements and the stress matrix Kσ which
depends on the membran forces.
K t = Ko + K nl + Kσ (3.5)
with
T
K o = ∫ A Bo D Bo da
T T T
K nl = ∫ A Bo D Bnl da + ∫ A Bnl D Bo da + ∫ A Bnl D Bnl da (3.6)
N xx N xy
Kσ ∫ A G G da
T
=
N xy N yy
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 29
4.2 Contact approaches
In this program SJ MEPLA five possibilities are given to calculate contact conditions:
point fixings:
- contact between the circular disks (shim) and the glass surface
- contact between the bush and the bore hole rim
- contact between the separators and the glass edges
insulation glass:
- contact between the glass packages
elastic edge and line supports:
- contact between the glass and the elastic line or edge supports
elastic base:
- contact between the elastic base and the plate
spacers in insulation glass:
- non-linear behaviour for tension and compression
These contact conditions are also valid for dynamic calculations like the pendulum impact
calculation.
Because the contact condition within insulation panes may cause solving problems, this op-
tion may only be used in exception. The solving of such situations within static calculations
when the panes are overlapping is very difficult to perform.
For solving the contact problem between glass and the separators, the following function is
used, to describe a consistent separation:
When the distance between the glass and the separators is larger than the given tolerance
value, the stiffness of these layers is reduced to zero. Are the contact faces lying in between
the tolerance value, than the young's modulus is continuously changed to a factor of 1 (full
elastic modulus). So under compression (negative strains) always the given modulus is used.
The solution process is controlled and improved by the given tolerance value and cannot
alternately skip between two states.
The contact problem for insulation glass is much more complex. Two stiff bodies with less
elasticity impacts under high velocity. The multi-layered elements here used, do not have any
elasticity in transverse direction and interface elements must be used. Using the glass mate-
rial the impact calculation is possible, but will take place very short in time steps of a millionth
second. For practical use this way is herein not traced and instead an approximation is car-
ried out which will allow a small overlapping of the panes.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 30
Therefore non-linear springs will be used. When contact condition is achieved (distance is
less than the tolerance value) springs are provided which rapidly increase, when the panes
are overlapping. In this way the glass faces will return during iteration to form the approxi-
mate contact of the faces.
The tolerance entry helps to introduce the contact slowly, in order to then increase it continu-
ously. This contact behaviour is comparable with an intermediate layer with the thickness of
tolerance and the possibility of a slight penetration of the panes. Such a system can be
solved very much faster and therefore, is favoured here; but it represents an approximation.
The solution of the contact problem occasionally requires a new creation of the stiffness ma-
trix, if many relocation occur through large area contact or many contact springs must be
included into the stiffness matrix.
Note:
With increasing stiffness of separating layers the tolerance shall correspondingly be reduced,
what increases the requirements on the convergence of the calculation and therefore the
CPU time can extend extremely. In some cases it can be possible that no convergence can
be achieved (the force error increases instead of the fact that in converges to zero). Then the
contact tolerance must set to higher values. Best solutions will be achieved, when the pre-
settings (0.01 to 0.001 mm for rigidities of about 50 to 500 N/mm²) are used.
4.3 Dynamic calculation approaches
4.3.1 Mass matrix
The mass matrix is build through numerical integration of
n
M = ∑ ∫ A H iT mi H i da
i =1
and summation over all layers i, with mi for the multi-layered element:
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
mi = ρ i t i 0 0 0 ti
2
0
12
0 0 0 0 2
ti
12
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 31
4.3.2 Newmark procedure
Solving the differential equations of motion is done by use of Newmark´s time stepping pro-
cedure.
In contrast to explicit procedures, here 3 equations of motion in the unknown state of time
t+∆t are denoted:
M &u& t + ∆t + R t + ∆t = P t + ∆t (3.7)
u t + ∆t = u t + ∆t + ∆ t β &u&t + ∆t
pred 2
(3.8)
u& t + ∆t = u& t + ∆t + ∆t δ &u&t + ∆t
pred
(3.9)
with
∆ t2
u
pred
t + ∆t = u t + ∆t u& t + (1 - 2 β ) &u&t (3.10)
2
u& t + ∆t = u& t + ∆t (1 - δ ) &u&t
pred
(3.11)
With use of (3.10) and (3.11) a first approximation for deformation and velocity are predicted
for t+∆t (predictor-phase). After solving the equation system
K ⋅ ∆u = U
*
in the estimated state with the residual forces
U = P - M&u& - R
and the stiffness matrix
* M
K = + Kt
∆ t2 β
the deformation is build through summation of all incremental displacements in time step ∆t,
u t + ∆t = u t + ∑ ∆u
Using equation (3.8), the acceleration can be solved, which when inserted in (3.9) results to
a corrected velocity (corrector-phase). This iteration is then repeated during each time step
∆t until convergence is achieved. The constants δ and β controls the solution process. The
use of
1
δ ≥ 0.5 β = ( δ + 0.5 )2
4
will lead to absolute convergence, but with numeric conditioned damping attenuation, which
can be avoided with δ = 0.5 (stability limit).
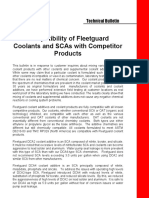
4.4 Pendulum body approach
If panes of glass are planned with drop securing function, e.g. at parapets, a pendulum ex-
periment has to be carried out to simulate an impacting person. In this case, the pendulum
may not break through the pane of glass neither larger pieces of broken glass may solve
themselves and fall to ground.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 32
glass panel
pendulum
drop height
Pendulum test for a parapet fixed at two opposite edges
The standard pendulum according DIN EN 12600 consists of two tires with 4.0 bar air pres-
sure and a mass of 50 kg.
The computational simulation of this experiment is a classical contact problem of two elastic
bodies in interaction.
AR CR mp
Rp Rp Rp Rp
ws wp
Model of pendulum with deformations approaches and the spring stiffness
Since the contact occurs between the tires and the glass panel, the system is splitted at this
point for model building. On the side of the glass plate, the pendulum force Rp performs with
the corresponding deformation of the glass plate ws. On the right side, it equilibrium exists
within the tire spring with rigidity CR and further equilibrium with the acceleration of the pen-
dulum mass. This leads to the 3 equations:
...
...
Ku + M&u& = P + (3.12)
R p
...
R p = C R ( w p - ws ) (3.13)
&& p = - R p
mp w (3.14)
Contact is achieved, when (wp - ws) < 0 and so the reaction force Rp = CR (wp - ws) is also
negative. The calculation of impact is here shown for example that the impact is applied from
positive z direction with negative velocity, which is computed from the given drop height.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 33
The impact force is distributed over the tire foot prints, which depends on the deformation
∆wR = (wp - ws) of the tires. With the radii of tires R1 = 51 mm and R2 = 194.5 mm
R2
R1 AR
Geometry of pendulum tires
the pressurised area AR can be calculated by use of ellipse equations due to the tire defor-
mation
AR = π (R 2
1 )(
- ( R1 - | ∆ wR | )2 ⋅ R 22 - ( R 2 - | ∆ wR | )2 )
The entire tire force RP is distributed uniformly over the tire foot print area by dividing in n x n
squares of the same size, where in each center 0.5·RP/(n·n) is applied.
For calculation of equivalent nodal forces from single loads, acting anywhere within an ele-
ment and doesn't applied any node directly, a special procedure is used to calculate the local
position η,ξ out of global coordinates x and y.
The coupling of the equations of motion for the multi-layered element and the pendulum is
done be use of a sub-system. So the routines of the finite element program do not change
and the calculation of the pendulum impact may be switched on or off.
Therefore a single approach is used for the pendulum using the Newmark´s method. In de-
pendency from the relative deformation ∆wR, the interacting force RP (<0: contact or $0: no
contact with RP = 0) is coupled into the equations of motion for the plate and the pendulum.
The rigidity CR for the tire is determined from experiments which were carried out in [38,47].
From acceleration measurements of the pendulum that impacts from different drop heights a
rigid wall has been used to get the non-linear rigidity of the spring, which was determined by
integrating the acceleration-time curve to
C R = 300 + 2 | ∆ wR | [N/mm]
4.5 Principal stresses
The principal stresses are calculated using the following formulae:
σ xx + σ yy σ − σ yy
2
σ =
h
+ xx + σ xy2 major principal stress
2 2
σ xx + σ yy σ − σ yy
2
σ =
h
− xx + σ xy2 minor principal stress
2 2
The maximum principal stress will be used for structural analyses of glass plates.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 34
4.6 Equivalent Von Mises stress
The equivalent Von Mises stress is calculated using the following formulae:
σv = σ xx2 + σ yy2 − σ xx ⋅σ yy + 3 ⋅ σ xy2
The stress components transversal shear σxz and σyz are not considered. These mechanical
properties are often used for structural analyses of metal plates.
4.7 Loading approaches
4.7.1 Face loads
Every glass package (a laminated compound of glass panels) can be loaded by face loads.
The face loads affects onto the entire plate face in the z-direction, so perpendicular to the
area.
V
p
z
y
The load vector is gained from numerical integration of the acceleration vector over all ele-
ments with their related mass density.
Beside the constant applied load from above as well a linear increasing load can be given.
For this purpose a first and second reference height in y-direction y0 and y1 with there be-
longing pressure values must be defined.
p1
z y
p0
y0
x y1
(New in version 3.0) This input describes the loading situation inbetween both reference lines
The internal load is again calculated by integrating every element situation which is lying
completely within both lines, to get the total nodal vector. For elements which will be cut a
special iteration is used.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 35
The shown element is subdivided into several squares to approximate the loaded face. Due
to this approach, a little error may result for the totally applied force, which normally is less
than 0.5 Newton.
With this tool water pressure or culminations of snow can be regarded.
4.7.2 Line loads
Defining the starting and ending point a line load can be defined. This line load has the unit
of [N/mm] or without conversion [kN/m].
qz
x0 ,y0
z
y
x1 ,y1
x
Within SJ MEPLA only parts of the line lying within the panel are considered. The load will
be separated into several not less than 20 parts or as a second condition equally spaced with
a minimum of 20 mm length. Along this line the line load can be defined in 3 directions (qx,
qy, qz). For laminated glass each load in pane direction is distributed according to the thick-
ness of each layer.
4.7.3 Concentrated loads
Any concentrated loads (or point loads) can be applied with the 3 direction at any place. Ap-
plying of moments is not possible.
The force Fz acts simultaneously onto all layers in accordance with the degree of freedom
approach for the multi-layered element (see section 3.1.1).
z Fz
y x ,y
Ly
Lx
x
Distribution of concentrated loads over the area Lx · Ly
Reference point is the middle of the area. The extension of the load area is defined in x
direction with the length Lx and in y direction with Ly. The given total loads Fx, Fy or Fz is dis-
tributed uniformly in accordance to the specified area. The forces Fx and Fy are divided up
according to the thickness of each layer, when laminated glass is used. In this way, it’s pos-
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 36
sible at the edges of the panes, e.g. for glass swords, to place in-plane forces (see section
4.7.2 line loads).
Ly
Lx
x
z
Concentrated loads in in-plane direction
In above picture, a load is indicated in negative y-direction. If the reference point is placed
close to the edge (middle of the face) and the length of the load area Ly will be chosen very
small a line load is achieved; the load Fy is applied uniformly into the glass border.
The input of the reference point (middle of the load distribution area) is independent from the
element nodes. In the program, the elements are automatically determined, which are influ-
enced from this loading.
This is achieved mathematically through a specific procedure, which first determines the af-
fected element number and second the local coordinates which will receive a load part. The
numeric integration is performed by subdividing the applied loads into many partial loads,
which are distributed uniformly via the distribution area. The load distribution area is not
based on the element faces and in this way, is independent of the existing element mesh.
But, the accuracy of calculation is (as always in finite element approaches) depending on the
mesh density. If an high accurate calculation of stresses in the region of a loaded area
should be achieved, this may need a finer mesh in order to represent correctly the local ef-
fects. The number of elements is to balance between the necessary accuracy and the toler-
able computation time.
4.7.4 Dead weight
The calculation of the dead loads is carried out by integration the mass density and by multi-
plication with the earth's gravity acceleration vector (9.81 m/s²), so that a volume load vector
results which is applied as an external loading to the system.
For dead weight calculations the density of the layers material must be given. Glass has for
example a density of 2550 kg/m³, which must be given in SJ MEPLA in units [tonnes/mm³],
so that 2.55e-9 [to/mm³] must be set for the density. This must be done in this predefined
units, to avoid later conflicts when dynamic calculations shall be carried out.
Example:
v ·9.81
z y
o
45
x
Input of v = ( 0., -1., -1. ) which is converted within the program to (0., -0.707, -0.707 )
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 37
The pane is lying in x-y plane, but the dead weight (gravity vector) is acting onto it, as if the
pane has been rotated by 45° against the horizontal .
Alternatively it’s possible to define the angle of rotation about the x-axis in degree. This will
calculate the vector of acceleration automatically. When setting dead weights onto rotated
panes, not only perpendicular forces will arise! As well forces in plane will occure and must
be supported such, that a statically determined system is set.
4.7.5 Temperature constraints
A temperature difference in the layers of a laminated glass pane (or a general sandwich)
forms a constraining force state and bending of the pane is caused. This behaviour may be
considered by taking a constant temperature per layer into account. A temperature gradient
within one layer (difference between top and bottom side of a layer) can not be applied. A
temperature gradient in a laminated pane can only be represented by a layer wise constant
temperature gradient.
T3
T2 = 0
T1
Constraining forces due to temperature differences in the layers
Each temperature difference will lead to an elongation or a shortening of the panel. When
they are glued together this change in length will lead to bending, in dependency to the in-
termediate gluing stiffness.
Necessary for this calculation is the coefficient of thermal expansion "T for the layer material.
4.7.6 Pressure hit
The use of pressure hit allows to vary face loads and point loads by time. This calculation is
carried out dynamically. Measured or free data points can be given. The value of the y-co-
ordinate is taken as a load factor to be multiplied with previously given loads, before there
are applied to the system within the regarded actual time step.
When a face load is set to 1., the y co-ordinate can be given in the unit of N/mm². When
measured values are given in kN/m² the values can be converted to N/mm² by giving the
face load as 0.001. As well the loading co-ordinate can be regarded as loading factor in be-
tween the values 0 and 1 (100%).
The calculation shall always start with forces of value zero, that no sudden load applying can
occur. As in reality it’s not possible to apply loads within no time duration!
The corner smoothing is a value which describes the rounding of sharp curve edges as an
inserted arc of given radius.
The time stepping will take place as shown in the card <pendulum impact>. With the given
time step length the values of the curve are interpolated and applied to the system until no
more values can be read or the given duration has been reached.
With this card it’s possible to simulate wind blasts or detonations and there effects to glass
panels.
This load option can be used with all other possibilities within the program except the pendu-
lum calculation.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 38
4.7.7 Load case calculation
(New in version 3.0)
The calculation of load cases allows the combination of different loads, which all are applied
automatically within one stiffness assembly. Calculations which are neither non-linear nor
needs iterations due to contact conditions, can be solved very shortly, as the stiffness matrix
must be assembled only once and after one solutions process only back substitutions are
needed. When non-linear calculation are set, the solution process will be increased, because
now the system can’t be solved in on step.
Additional to new setting of loads like dead weight, wind, snow, point loads or climatic loads
these values can be combined with safety factors, valid for each of those loads within the set
load case.
The setting of safety factor for climatic loads needs some additional explanations:
A climatic load consists of temperature changes within the gap filled with gas, the arising
pressure difference in the gap, which will result from changes of the barometric air pressure
and a possibly difference of height between assembly and installation of this insulation glass,
which will also change the outside air pressure.
Climatic behaviour of insulation glass
The gap gas temperature changing can be multiplied directly by the safety factor, as it’s the
case for the difference of height. As in SJ MEPLA no approximations are used and the real
gas pressure law is regarded, that any system can be solved, the effect of a safety factor γ
set onto pressure difference must be recalculated from the acting outside and inside pres-
sures, which are normally used directly.
Therefore the following calculation from γ to get a new factor γ* is performed:
pa + ( pi − pa ) ⋅ γ
γ *=
pi
pa: barometric outside pressure
pi: inside pressure within the gap (the pressure when closing/sealing the gap)
This new factor γ* can now be used to set directly onto the inside pressure pi to describe the
original effect of the factor γ acting onto pressure difference.
pi * = pi ⋅ γ *
The outside pressure will be hold constant and the inside pressure is chosen such, that the
same effect is achieved.
When the factor γ is set to zero, the pressure difference is levelled and the ouside pressure is
equal to the inside pressure of the insulation glass.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 39
When the factor is set to 1.0 the pressure difference between the preset load cases for pi and
pa (winter/summer condition) will be kept.
5 Comparisions
5.1 Convergence study
The accuracy of a finite element calculation depends on the fineness of the used mesh. At
the following, one example how the mesh density affects the result and a good result is
achieved is presented.
The following system will be used:
- square plate with the measures 1000x1000mm
- layers:
5.0 mm, E = 70000. N/mm², < = 0.23 (top layer)
5.0 mm, E = 5. N/mm², < = 0.40 (intermediate layer)
5.0 mm, E = 70000. N/mm²,< = 0.23 (bottom layer)
- face load: -0.005 N/mm²
- simply supported
- non-linear calculation (large displacements)
Reference calculations with the finite element program MARC [32] by making use of 300 and
2400 volume-elements leads to the following results:
10x10x3 = 300 20x20x6 = 2400 elements
elements
displacement, centre of plate [mm]
-5.72 -5.73
2
stresses, centre top side [N/mm ]
-11.00 -11.04
2
stresses, centre bottom side [N/mm ]
15.37 15.18
Under variation of the mesh refinements, the 9-node multi-layered element in SJ MEPLA
leads to the following results:
mesh refinement 1x1 2x2 3x3 4x4 5x5 6x6 8x8 10x10
displacement, centre -4.05 -5.86 -5.69 -5.69 -5.70 -5.70 -5.70 -5.70
of plate [mm]
stresses, centre top -10.82 -11.58 -11.72 -9.95 -11.39 -10.48 -10.71 -10.82
side [N/mm2]
stresses, centre bot- 6.51 23.02 14.10 16.21 14.78 15.50 15.30 15.22
tom side [N/mm2]
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 40
The high accuracy of the 9-node element is shown. Using more than 25 elements, the accu-
racy for the stresses is better than 2.6%. The deformations converge very much faster onto
the required value of 5.73 mm. For standard calculations (simply supported plates) a mesh
subdivision of 8x8 = 64 to 10x10 = 100 elements is mostly sufficient.
5.2 Pendulum impact onto a pre-stressed glass
Within the scope of the experiments in [47], some pendulum test for pre-stressed glass
(toughened glass) where carried out. In picture 5.1 the slope of the acceleration-time curve is
shown for a drop height of 700 mm onto a 8 mm glass panel:
300
Versuch
Beschleunigung des Pendels [m/s^2]
Berechnung
240
180
120
60
0
-0,005 0,005 0,015 0,025 0,035 0,045 0,055
Zeit [s]
Fig 5.1: comparison between experimental and calculated acceleration
The comparison between the calculated acceleration and the measured curve shows the
high accordance with the here not broken pane.
240
Berechnung horizontal
Berechnung vertikal
Versuch horizontal
180 Versuch vertikal
Spannungen [N/mm^2]
120
60
-60
0 0,016 0,032 0,048 0,064 0,08 0,096
Zeit [s]
Fig 5.2: experimental data versus calculated stress results
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 41
The stresses in picture 5.2, measured lengthwise and in cross-direction under the impact
point, could be as well good simulated in trend.
This tests validates the simple approach for the ultimate limit state (broken glass) for such
impact tests, that the usage of twice the glass strength is a possible approach for short time
effects.
Allowable stresses for the pendulum impact (German guideline):
Float glass: 80 N/mm²
Strengthened glass: 120 N/mm²
Heat toughened glass: 170 N/mm²
Due to the short time impact duration, these stresses do generally not lead to failure of the
panes. The pendulum test is passed, when no great broken fragments fall to ground. There-
fore an additional safety for pendulum calculation exists, as only for probably failure a predi-
cation can be made with finite element calculations.
5.3 Pendulum impact on laminated safety glass
In [47] also safety glass (laminated glass) supported in a standard frame where tested. They
consists of 2x3mm float glass panes with 0.38 mm butatice (PVB). The drop height has been
450 mm.
210
Beschleunigung Mittelwert
180 monolithisch t = 6.38 mm
VSG mit G = 1 N/mm^2
monolithisch t = 6.0 mm
Beschleunigung [m/s^2]
150
VSG mit G = 4 N/mm^2
120
90
60
30
-30
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09
Zeit [s]
Fig 5.3: acceleration-time slope for pendulum impact on 6 mm strengthened glass
In picture 5.3 several approaches for calculation of laminated glass panes versus experimen-
tal data are shown. The black dashed line shows the acceleration over and under the double
tires. The unbroken black line characterizes the mean value of these measured acceleration.
In reality, laminated panes behave visco-elastically. The stiffness of butatice depends on the
load, the deformation state and the temperature. It could be shown [1,26], that for short term
load an extreme stiffening effect occurs and that the laminated panes acts as a monolithic
one.
Therefore some calculations are represented in picture 5.3, where the attempt was made to
best approximate the test results by using a linear material law instead of the real viscous-
elastic behaviour. The best compliance has been found for a monolithic approach, with the
total thickness with or without the compound layer. Even an approach for a laminated glass
pane with a shear modulus of G = 4 N/mm² still brought no sufficient agreement. The shear
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 42
modulus activated is even higher so that one can regard laminated safety panes for a pendu-
lum simulation as monolithic.
6 Notes
- In the program SJ MEPLA, the units are proposed. Towards the usual free choice of the
units in finite element programs, we work here in N and mm (if nothing other is indicated)
in order to avoid conversion mistakes in particular for dynamic calculations. From this de-
fault a unit of [tonnes/mm] results e.g. for the density.
- No further loads shall be applied for the pendulum simulation (dynamic calculation) ex-
cept the pendulum body or the pressure hit loads itself. An additional concentrated load
for the pendulum impact would lead to a suddenly applied load which is set on at infinitely
short time and actuate the system suddenly for swinging.
- Calculating several panes of glass packages with in each case several layers however, is
indeed possible, but one ought to consider that the time required for the solution can in-
crease extremely under contact approaches, especially in the case of a fine element
mesh and dynamic calculations.
- In such a way, dynamic pendulum calculations e.g. should regard the effects of the full
compound and laminated glass panels shall be calculated with a monolithic cross section
(only one layer with total pane thickness), with what the time required is reduced strongly.
- In some extreme cases, e.g. in the case of point fixing calculations with very small con-
tact tolerances applied or a system which is nearby static indefiniteness (may be caused
by contact conditions), it can occur that calculations do not converge. Therefore, the cal-
culation is ended automatically after at least 6000 unsuccessful iterations (see User´s
Manual).
- The automatic generation of the point fixing elements needs a specific space in order to
produce the element mesh. The mesh for the point fixing of type 1, 2 or 7 needs a small
distance (about 20 mm) between the disk and the pane border. Before an extensive cal-
culation, we always recommend to regard the system via <system preview> and to ap-
propriate modify the mesh refinement.
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 43
7 Literature
[1] Bohmann, D.; Ein numerisches Verfahren zur Berechnung von Verbundglasscheiben,
Shaker Verlag Aachen, Schriftenreihe - Stahlbau, RWTH Aachen, Heft 43 (1999)
[2] Pica A.; Wood R. D.; Hinton E. Finite element analysis of geometrically nonlinear plate
behavior using a Mindlin formulation; Computer&Structures Vol. 11 pp. 203-215 (1980)
[3] Praktische Rheologie der Kunststoffe und Elastomere / VDI-Gesellschaft Kunststoff-
technik; Düsseldorf VDI-Verlag, (1991)
[4] Zienkiewicz O. C.; Methode der finiten Elemente; München,Wien Hanser (1984)
[5] Nádai A.; Die elastischen Platten; Berlin, Springer Verlag (1925,1968)
[6] Bathe K. J.; Finite-Elemente-Methoden, Berlin, Springer Verlag (1986)
[7] Donea J.; Lamain L. G.; A modified representation of transverse shear in Co quadrilat-
eral plate elements; Comp. Meth. Appl. Mech. Engng., 63, 183-207 (1987)
[8] Prathap G.; Ramesh Babu C.; Field-consistent strain interpolations for the quadratic
shear flexible beam element; Int. J. Numer. Meth. Engng., Vol 23 pp. 1973-1984 (1986)
[9] Prathap G.; Naganarayana B. P.; Somashekar B. R.; Field-consistency analyses of the
isoparametric eight-node plate bending element; Computer&Structures, Vol 29 No. 5 pp.
857-873 (1988)
[10] Prathap G.; Somashekar B. R.; Field- and edge-consistency synthesis of a 4-noded
quadrilateral plate bending element; Int. J. Numer. Meth. Engng. Vol. 26, 1693-1708 (1988)
[11] Whitney J. M.; Stress analyses of thick laminated composite and sandwich plates; J.
Composite Materials, Vol. 6 pp. 426-440 (1972)
[12] Bathe K.-J.; Dvorkin E. N.; Short communication, A four-node plate bending element
based on Mindlin/Reissner plate theory and mixed interpolation; Int. J. Numer. Meth. Engng.,
Vol. 21, 367-383 (1985)
[13] Kebari H.; A one point integrated assumed strain 4-node Mindlin plate element; Eng.
Comput., Vol. 7, 284-290 (1990)
[14] Huang H. C.; Hinton E.; A 9-node Lagrangian Mindlin plate element with enhanced
shear interpolation; Eng. Comput., Vol. 1, 369-379 (1984)
[15] Hinton E.; Huang H. C.; Shear forces and twisting moments in plates using Mindlin
elements; Eng. Comput.; Vol. 3, 129-142 (1986)
[16] Timoshenko S. P.; Woinowsky-Krieger S.; Theory of Plates and Shells, McGraw-Hill,
New York (1959)
[17] Owen D. R. J.; Hinton E.; Finite Elements in Plasticity: Theory and Practice; Pineridge
Press Limited, Swansea, U.K. (1980)
[18] Mukhopadhay M.; Analyses of plates using isoparametric quadratic element-shear re-
actions, patch loading and some convergence studies; Computer&Structures, Vol. 17 No. 4,
587-597 (1983)
[19] Geier B.; Composite Laminate Stiffnesses and Their Sensitivities; Forschungsbereicht,
DLR, Institut für Strukturmechanik, Braunschweig, DLR-FB 92-16
[20] Stiftinger M. A.; Semi-Analytical Finite Element Formulation for Layered Composite
Shells with Consideration of Edge Effekts; Fortschrittsberichte VDI Verlag, Reihe 18: Mecha-
nik/Bruchmechanik, Nr. 203
[21] Becker W.; Beiträge zur analytischen Behandlung ebener Laminate; Fortschrittsberich-
te VDI Verlag, Reihe 18: Mechanik/Bruchmechanik, Nr. 121
[22] Reddy J. N.; Robbins D. H. Jr.; Theories and Computational Models for Composite
Laminates; Appl. Mech. Rev., Vol. 47, No. 6, 147-169 (1994)
[23] Sarma B. S.; Varadan T. K.; Certain discussions in the finite element formulation of
nonlinear vibration analyses; Computer&Structures; Vol. 15 No. 6, pp. 643-646 (1982)
[24] Abrate S.; Sun C. T.; Dynamic analyses of geometrically nonlinear truss structures;
Computer&Structures, Vol. 17, No. 4, pp. 491-497 (1983)
[25] Chow T. S.; On the propagation of flexural waves in an orthotropic laminated plate and
its response to an impulsive load; J. Composite Materials, Vol 5 p. 306 (1971)
[26] Sobek W., Kutterer M., Messmer R. ; Rheologisches Verhalten von PVB im Schubver-
bund; Forschungsbericht 4/98, Bauen mit Glas, Institut für leichte Flächentragwerke, Stutt-
gart (1998)
SJ Software GmbH Aachen
SJ MEPLA Theory Manual Version 3.0 Page 44
[27] Gross D.; Hauger W.; Schnell W.; Wriggers P; Technische Mechanik; Band 4: Hydro-
mechanik, Elemente der höheren Mechanik, Numerische Methoden; Springer-Verlag (1995)
[28] Mindlin R. D.; Influence of rotary inertia and shear on flexural motions of isotropic
plates; J. Appl. Mech., 18, 31-38 (1951)
[29] Beyle H. P.; Prüfbericht Nr. 98 - 3022; Labor für Stahl- und Leichtmetallbau, FH Mün-
chen, Prof. Dr.-Ing. Ö. Bucak, Auftraggeber: Verroplan GmbH (1998)
[30] Huang H.-C.; Static and Dynamic Analyses of Plates and Shells; Springer Verlag
[31] ABAQUS; Version 5.7, Hibbitt, Karlsson & Sorensen, Inc. Pawtucket, USA (1998)
[32] MARC/MENTAT;Version 7.2/3.22, MARC Analysis Research Corporation, Palo Alto,
USA (1998)
[33] Maksimovic S., Komnenovic M; Improved nonlinear finite element analysis of layered
composite structures using third-order theory, CIVIL-COMP Ltd. Edinburgh, Scottland, Ad-
vances in non-linear finite element methods, 251-261 (1994)
[34] Campos A.D., Kurban A.E.A.; Vibrations of laminated beams, CIVIL-COMP Ltd. Edin-
burgh, Scottland, Advances in non-linear finite element methods, 243-250 (1994)
[35] Bisegna P., Sacco E.; A layer-wise laminate theory rationally decuded from the three-
dimensional elasticity, J. Appl. Mech., Vol 64, 538-545 (1997)
[36] Levinson M.; An accurate, simple theory of the statics and dynamics of elastic plates,
Mech. Res. Com., Vol 7, 343-350 (1980)
[37] Hinton. E; The flexural analysis of laminated composites using a parabolic isometric
plate bending element, Numer. Meth. Engng., Vol 11, No 1, 174-179 (1975)
[38] Sedlacek G., Bohmann D., Schäfer E.; Untersuchung zum Schwingverhalten von Ver-
bundglasscheiben, Lehrstuhl für Stahlbau, RWTH Aachen; (unveröffentlicht) (1998)
[39] Gawehn W.; Finite-Elemente-Methode, Lehrbuch, Vieweg, Braunschweig (1985)
[40] Gummert P., Reckling K.-A.; Mechanik, Vieweg, Braunschweig (1986)
[41] HT Troplast AG; Technische Daten zur Trosifol PVB-Folie
[42] Sedlacek G., Hortmanns M.; Wellershoff F.; Windkanaluntersuchung zur Bestimmung
der Fassadenlasten am Staatlichen Bauamt Dortmund, Lehrstuhl für Stahlbau, RWTH Aa-
chen (1998)
[43] Deutsches Ingenieurblatt, Neue Produkte, Mitteilungen von HT Troplast und DuPont,
Dezember (1998)
[44] Güsgen, J.; Bemessung tragender Bauteile aus Glas, Shaker Verlag Aachen, Schrif-
tenreihe - Stahlbau, RWTH Aachen, Heft 42 (1998)
[45] Fa. Wendker & Selders, Steinglas-Verbundsysteme, patentierte Marmor- Glas Ver-
bundanwendung (1998)
[46] Sedlacek G., Blank K., Laufs W., Güsgen J.; Glas im konstruktiven Ingenieurbau,
Ernst&Sohn (1999)
[47] Wörner J.-D., Schneider J.; Zwischenbericht zur Durchführung von Versuchen zum
weichen Stoß mit dem Pendelkörper nach DIN EN 12600, Institut für Statik, Darmstadt
(1999)
[48] Pölling, R; Grundsatzuntersuchung von Einscheiben- und Verbundglas als Tragele-
ment, Diplomarbeit, Ruhruniversität Bochum, (1996)
[49] Schutte A., Hanenkamp W.; Zum Tragverhalten von Verbund- und Verbundsicher-
heitsglas bei erhöhten Temperaturen unter Einwirkung von statischen und dynamischen Las-
ten, Ernst&Sohn, Bautechnik 76, Heft 1, (1999)
[50] Laufs, W.; Ein Bemessungskonzept zur Festigkeit thermisch vorgespannter Gläser,
Shaker Verlag Aachen, Schriftenreihe - Stahlbau, RWTH Aachen, Heft 45 (2000)
[51] Dercks, Ch.; Isolierglasscheiben unter Klimalasten, Diplomarbeit RWTH Aachen, Lehr-
stuhl für Stahlbau, (1997)
[52] Bohmann, D.; FEM – New Ways in Glass Design and Engineering, Internet Forum der
Glass Processing Days (www.glassfiles.com), Tampere, Finland, 2001
[53] Schneider, J.; Bohmann D.; Glasscheiben unter Stoßbelastung, Experimentelle und
theoretische Untersuchungen für absturzsichernde Verglasungen bei weichem Stoß, Bauin-
genieur, Springer Verlag, Band 77, Dez, 2002
SJ Software GmbH Aachen
You might also like
- Chemistry in Focus A Molecular View of Our World 6th Edition Tro Solutions Manual 1Document12 pagesChemistry in Focus A Molecular View of Our World 6th Edition Tro Solutions Manual 1alison100% (39)
- EML 4507 Spring 2017 HW11 SolutionDocument7 pagesEML 4507 Spring 2017 HW11 SolutionUnmil PatelNo ratings yet
- SJ Mepla: Theory ManualDocument46 pagesSJ Mepla: Theory ManualSudhakar KrishnamurthyNo ratings yet
- SJ Mepla Manual Theory EngDocument55 pagesSJ Mepla Manual Theory Engconsultoria.arkNo ratings yet
- Anomalies in Quantum Field Theory: Marco SeroneDocument48 pagesAnomalies in Quantum Field Theory: Marco SeronetrevorscheopnerNo ratings yet
- Chapter 3 - EnglishDocument160 pagesChapter 3 - EnglishThời DươngNo ratings yet
- Advanced Solid Mechanics - Theory, Worked Examples and ProblemsDocument248 pagesAdvanced Solid Mechanics - Theory, Worked Examples and ProblemsValentina Gabor100% (2)
- Finite Element Technology: Lecture NotesDocument63 pagesFinite Element Technology: Lecture NotesJuan Francisco Acuña ContrerasNo ratings yet
- AFEM Ch03Document19 pagesAFEM Ch03Kristinochka SlavenkovnaNo ratings yet
- SLP_Report_FinalDocument37 pagesSLP_Report_Finalparwanigopal137No ratings yet
- Mertens-Turiaci2021 Article LiouvilleQuantumGravityHolograDocument71 pagesMertens-Turiaci2021 Article LiouvilleQuantumGravityHolograFajar NugrahantoNo ratings yet
- Chapter-1: Title Pg. No. Nomenclature List of FiguresDocument6 pagesChapter-1: Title Pg. No. Nomenclature List of FiguresRammohan ReddyNo ratings yet
- Torsion PDFDocument20 pagesTorsion PDFBryan VillalobosNo ratings yet
- University of Liege Department Mécanique Des Matériaux & StructuresDocument34 pagesUniversity of Liege Department Mécanique Des Matériaux & StructuresDaniel PedrosaNo ratings yet
- $RKTDCZODocument23 pages$RKTDCZOXhoniNo ratings yet
- Topic Moment Tensor Inversion and Moment Tensor InterpretationDocument37 pagesTopic Moment Tensor Inversion and Moment Tensor InterpretationMarco QuirozNo ratings yet
- Chapter 03Document89 pagesChapter 03KIÊN HOÀNG TRUNGNo ratings yet
- Beam Theories With Solutions... Must Read PDFDocument39 pagesBeam Theories With Solutions... Must Read PDFRajendra PraharajNo ratings yet
- MPM118 07 AishDocument10 pagesMPM118 07 AishIbrahim HasanNo ratings yet
- The Interpretation of The Shear Locking IN Beam ElementsDocument8 pagesThe Interpretation of The Shear Locking IN Beam ElementsankurNo ratings yet
- Basic Principles of Plates and SlabsDocument148 pagesBasic Principles of Plates and SlabsMarin MariusNo ratings yet
- Mit - 1998-01 (1) Shear Stress in BeamsDocument31 pagesMit - 1998-01 (1) Shear Stress in BeamsabdullahNo ratings yet
- Magnetic Break ComsolDocument24 pagesMagnetic Break ComsolCata Coman100% (1)
- 11 Upper Bound Resonances Anosov FlowsDocument40 pages11 Upper Bound Resonances Anosov FlowsFrédéric FaureNo ratings yet
- Subramani 010207783Document74 pagesSubramani 010207783ataabuasad08No ratings yet
- Elab 4 Buckling of StrutsDocument11 pagesElab 4 Buckling of StrutsKhairul NazmanNo ratings yet
- Fransson Pettersson 2000Document44 pagesFransson Pettersson 2000Mauricio LobaoNo ratings yet
- FEM - Report LUSAS SoftwareDocument27 pagesFEM - Report LUSAS SoftwareSiti Rohani IsdrisNo ratings yet
- Radmi 2009: Research and Development in Mechanical IndustryDocument6 pagesRadmi 2009: Research and Development in Mechanical IndustrySnezana VulovicNo ratings yet
- Chapter 1Document43 pagesChapter 1TeeMyglandDaoNo ratings yet
- MATH 2403 Lecture - NotesDocument64 pagesMATH 2403 Lecture - Noteskesna100% (1)
- Torsional Stress AnalysisDocument15 pagesTorsional Stress AnalysisLe Xuan HungNo ratings yet
- Final Project 2021Document97 pagesFinal Project 2021Timothy UmpoNo ratings yet
- LecturaDocument13 pagesLecturaJose BezerraNo ratings yet
- Gluing Nekrasov Partition Functions: Jian Qiu, Luigi Tizzano, Jacob Winding and Maxim ZabzineDocument39 pagesGluing Nekrasov Partition Functions: Jian Qiu, Luigi Tizzano, Jacob Winding and Maxim ZabzineJack Ignacio NahmíasNo ratings yet
- Nonlinear Impact Response of Doubly Curved Composite ShellsDocument6 pagesNonlinear Impact Response of Doubly Curved Composite ShellsVenkata Swamy Naidu NeigapulaNo ratings yet
- Solid MechanicsDocument26 pagesSolid Mechanicsmy8271688No ratings yet
- Short Notes Unit - 2-FEMDocument33 pagesShort Notes Unit - 2-FEMgurumahesh gNo ratings yet
- Math Met Fluid Dyn 2020Document39 pagesMath Met Fluid Dyn 2020Mikhail BakuninNo ratings yet
- San Pedro - Lab 2Document11 pagesSan Pedro - Lab 2Amorfina SanpedroNo ratings yet
- Nonlinear Analysis, Instability and Routes To Chaos of A Cracked Rotating ShaftDocument24 pagesNonlinear Analysis, Instability and Routes To Chaos of A Cracked Rotating ShaftSaberElAremNo ratings yet
- FEM - Assignment - 1 (Theory)Document21 pagesFEM - Assignment - 1 (Theory)xpkallexpNo ratings yet
- Lecture 3Document150 pagesLecture 3Kedir ShiferawNo ratings yet
- Tutorials Direct Stiffness Method (7 To 10)Document7 pagesTutorials Direct Stiffness Method (7 To 10)nuuheila.hjNo ratings yet
- Unit 3 NotesDocument63 pagesUnit 3 NotesDamotharan Sathesh KumarNo ratings yet
- Theory of The Four Point Dynamic Bending TestDocument80 pagesTheory of The Four Point Dynamic Bending TestLuiz Carlos Vidal CastroNo ratings yet
- 2D ElementDocument22 pages2D ElementGabriel ChungNo ratings yet
- Experimental Test and ResultsDocument19 pagesExperimental Test and ResultsrilopiyNo ratings yet
- BT 03 StudentDocument14 pagesBT 03 StudentThanh Nhật PhạmNo ratings yet
- Laboratory Report No 3Document5 pagesLaboratory Report No 3李志超No ratings yet
- Quantum and Nonlinear OpticsDocument45 pagesQuantum and Nonlinear OpticsNick NardelliNo ratings yet
- FEM ImplementDocument51 pagesFEM ImplementOlympicMarmotNo ratings yet
- Bilinear Friction Model: Sliding WedgeDocument7 pagesBilinear Friction Model: Sliding WedgeDan WolfNo ratings yet
- Melde's Standing Wave: An Experiment in Exploring The Theoretical and Applied Physical Properties of Standing WavesDocument14 pagesMelde's Standing Wave: An Experiment in Exploring The Theoretical and Applied Physical Properties of Standing WavesLA LazarohNo ratings yet
- Topic 6 - FEM - 2Document42 pagesTopic 6 - FEM - 2danis nyaNo ratings yet
- Analytical and Numerical Modeling of Plain Concrete's Post-Cracking Behavior Using A Trilinear Softening CurveDocument15 pagesAnalytical and Numerical Modeling of Plain Concrete's Post-Cracking Behavior Using A Trilinear Softening CurvevNo ratings yet
- Department of Mechanical Engineering Strength of Materials LaboratoryDocument18 pagesDepartment of Mechanical Engineering Strength of Materials LaboratorySyfull musicNo ratings yet
- Elements of Fracture Mechanics: QuestionsDocument2 pagesElements of Fracture Mechanics: Questionsalvin tehraniNo ratings yet
- Chapter 4.1 - Direct Stiffness Method - StructuralDocument49 pagesChapter 4.1 - Direct Stiffness Method - Structuralsanyam KanungaNo ratings yet
- Numerical Methods For Partial Differential EquationsDocument107 pagesNumerical Methods For Partial Differential EquationsAlexey VoroninNo ratings yet
- 02.extras Mustati StalpiDocument1 page02.extras Mustati StalpiGigiNo ratings yet
- 04.extras Armare Centuri Peste ParterDocument1 page04.extras Armare Centuri Peste ParterGigiNo ratings yet
- 02.extras Mustati StalpiDocument1 page02.extras Mustati StalpiGigiNo ratings yet
- 02.extras Mustati StalpiDocument1 page02.extras Mustati StalpiGigiNo ratings yet
- 02.extras Mustati StalpiDocument1 page02.extras Mustati StalpiGigiNo ratings yet
- 02.extras Mustati StalpiDocument1 page02.extras Mustati StalpiGigiNo ratings yet
- 05.extras Armare Centuri Peste Etaj 1Document1 page05.extras Armare Centuri Peste Etaj 1GigiNo ratings yet
- 04.extras Armare Centuri Peste ParterDocument1 page04.extras Armare Centuri Peste ParterGigiNo ratings yet
- Materiale BanuDocument1 pageMateriale BanuGigiNo ratings yet
- CORTIZO - View Crystal BalustradeDocument1 pageCORTIZO - View Crystal BalustradeGigiNo ratings yet
- 02.extras Mustati StalpiDocument1 page02.extras Mustati StalpiGigiNo ratings yet
- TL 170614 Processing HPL Compact LaminatesDocument18 pagesTL 170614 Processing HPL Compact LaminatesGigiNo ratings yet
- SJ Mepla Handbuch Grafik EngDocument15 pagesSJ Mepla Handbuch Grafik EngGigiNo ratings yet
- Fisa Tehnica KS 1000 FH CZDocument3 pagesFisa Tehnica KS 1000 FH CZGigiNo ratings yet
- SJ Mepla Handbuch Programm EngDocument75 pagesSJ Mepla Handbuch Programm EngGigiNo ratings yet
- Fisa Tehnica KS 1150 RF FP F PL - RomanaDocument4 pagesFisa Tehnica KS 1150 RF FP F PL - RomanaGigiNo ratings yet
- 254 8 Liquid Vapour EquilibriumDocument6 pages254 8 Liquid Vapour EquilibriumJustina JankauskaitėNo ratings yet
- Physics For Scientists and Engineers Foundations and Connections 1st Edition Katz Test Bank 1Document35 pagesPhysics For Scientists and Engineers Foundations and Connections 1st Edition Katz Test Bank 1nell100% (44)
- Charcteristics of Volcanoes According To Record of EruptionDocument8 pagesCharcteristics of Volcanoes According To Record of EruptionJuan UnoNo ratings yet
- Application of Nonlinear Fluid-Structure Interaction Methods To Seismic Analysis of Anchored and Unanchored TanksDocument15 pagesApplication of Nonlinear Fluid-Structure Interaction Methods To Seismic Analysis of Anchored and Unanchored TanksRAKSHITH NNo ratings yet
- M SC - ChemistryDocument89 pagesM SC - ChemistrySaurabh ShubhamNo ratings yet
- Salt Fouling FCCDocument6 pagesSalt Fouling FCCVenkatesh Kumar RamanujamNo ratings yet
- Gold Nanoparticles For Physics, Chemistry and Biology 2012Document37 pagesGold Nanoparticles For Physics, Chemistry and Biology 2012Adrian TolayukNo ratings yet
- Classification of Reservoir and Reservoir FluidsDocument10 pagesClassification of Reservoir and Reservoir Fluidsugiyf eu6e6uNo ratings yet
- Perturbation Theory Stationary Perturbation MethodsDocument6 pagesPerturbation Theory Stationary Perturbation MethodsSaurav GOYALNo ratings yet
- Analytical Chemistry Laboratory: Qualitative Analysis & Metal Flame Emission Lab ReportDocument4 pagesAnalytical Chemistry Laboratory: Qualitative Analysis & Metal Flame Emission Lab ReportLu'lu Abdi Aziiz HassanNo ratings yet
- Scientific Modeling ReadingDocument4 pagesScientific Modeling ReadingAshis karNo ratings yet
- Boiling ChipsDocument3 pagesBoiling Chipskyra_kay226No ratings yet
- The Motion of ColorDocument6 pagesThe Motion of Colorapi-374832521No ratings yet
- Soal KRKK NewDocument6 pagesSoal KRKK NewGita WulandariNo ratings yet
- Exercise: ResonanceDocument36 pagesExercise: ResonanceRavi Ranjan ThąķůrNo ratings yet
- Multi-Cut Intelligent Control Cabinet Instructions System:X8Document4 pagesMulti-Cut Intelligent Control Cabinet Instructions System:X8Klever CampoverdNo ratings yet
- MSDS Chesterton 274Document5 pagesMSDS Chesterton 274Orlando RojasNo ratings yet
- Application Note: Determination of Nitrogen/Protein in Feeds, Grains, and Pet FoodDocument3 pagesApplication Note: Determination of Nitrogen/Protein in Feeds, Grains, and Pet FoodG_ASantosNo ratings yet
- 2-Propylheptanol: Decyl Alcohol (All Isomers)Document1 page2-Propylheptanol: Decyl Alcohol (All Isomers)Life with Our planetNo ratings yet
- Effects of Origins and Fermentation Time On The Antioxidant Activities of KombuchaDocument6 pagesEffects of Origins and Fermentation Time On The Antioxidant Activities of KombuchaLoïc QuéguinerNo ratings yet
- Laboratory Errors in Analytical LaboratoryDocument30 pagesLaboratory Errors in Analytical LaboratorySathish Vemula100% (1)
- Complexation Reactions and TitrationDocument34 pagesComplexation Reactions and TitrationS. MartinezNo ratings yet
- Astm B 221M-06Document15 pagesAstm B 221M-06Ahmad KhreisatNo ratings yet
- PaperDocument6 pagesPapermohitNo ratings yet
- Acsomega 7b02062Document10 pagesAcsomega 7b02062SiddharthBhasneyNo ratings yet
- SWOT Analysis Infographics by SlidesgoDocument38 pagesSWOT Analysis Infographics by SlidesgoCésar POnceNo ratings yet
- Compatibilidad - SB - TB03-05-2Document2 pagesCompatibilidad - SB - TB03-05-2Cesar G.No ratings yet
- Name: Shintiya Gangsar Rahayu Class:2D/D4 I.Question AnswerDocument2 pagesName: Shintiya Gangsar Rahayu Class:2D/D4 I.Question AnswerAnisa SudarmajiNo ratings yet
- Optimization of Pleated Filter Designs Using A Finite Element Numerical ModelDocument13 pagesOptimization of Pleated Filter Designs Using A Finite Element Numerical ModelCristian DabuNo ratings yet