You might also like
- Explicit MPC For LPV Systems: Stability and OptimalityDocument11 pagesExplicit MPC For LPV Systems: Stability and OptimalityGodofredoNo ratings yet
- Finite Control Set Model Predictive Control With Feedback Correction For Power ConvertersDocument8 pagesFinite Control Set Model Predictive Control With Feedback Correction For Power ConvertersPhùng Tiến ĐạtNo ratings yet
- 01 International Journal of Control 2017 Robust Model Predictive Control For Constrained Continuous Time NonlinearDocument17 pages01 International Journal of Control 2017 Robust Model Predictive Control For Constrained Continuous Time NonlinearNguyễn Xuân KhảiNo ratings yet
- Jiang 2017Document14 pagesJiang 2017Luis CarvalhoNo ratings yet
- State and Output Feedback Nonlinear Model Predictive Control: An OverviewDocument17 pagesState and Output Feedback Nonlinear Model Predictive Control: An OverviewShashank SrivastavaNo ratings yet
- Adaptive MPC For Iterative TasksDocument6 pagesAdaptive MPC For Iterative TasksEga PramNo ratings yet
- Data-Driven Economic NMPC Using Reinforcement Learning PDFDocument13 pagesData-Driven Economic NMPC Using Reinforcement Learning PDFPravin BeheraNo ratings yet
- Hertneck, M., Kohler, J., Trimpe, S., and Allg Ower, F. Learning An Approximate Model Predictive Controller With Guarantees PDFDocument6 pagesHertneck, M., Kohler, J., Trimpe, S., and Allg Ower, F. Learning An Approximate Model Predictive Controller With Guarantees PDFKeerthana g.krishnanNo ratings yet
- A Study of Robust Active Queue Management Schemes For Correlated TrafficDocument11 pagesA Study of Robust Active Queue Management Schemes For Correlated Trafficnithya_narmiNo ratings yet
- Robust Multiple Model Adaptive Control With Fuzzy Posterior Probability CombinationDocument10 pagesRobust Multiple Model Adaptive Control With Fuzzy Posterior Probability Combinationnadia.imranNo ratings yet
- Paper4 Asian Journal of Control Volume 7 Issue Number 3 Page(s) 323-329Document7 pagesPaper4 Asian Journal of Control Volume 7 Issue Number 3 Page(s) 323-329Nguyen Quang ThuanNo ratings yet
- Robust Model Predictive Control For A Class of Discrete-Time Markovian Jump Linear Systems With Operation Mode DisorderingDocument13 pagesRobust Model Predictive Control For A Class of Discrete-Time Markovian Jump Linear Systems With Operation Mode DisorderingnhatvpNo ratings yet
- Kersting Et Buss - 2017 - Direct and Indirect Model Reference Adaptive ContrDocument16 pagesKersting Et Buss - 2017 - Direct and Indirect Model Reference Adaptive Contrlutterford18No ratings yet
- Review On Model Predictive Control: An Engineering PerspectiveDocument23 pagesReview On Model Predictive Control: An Engineering PerspectivehenrydclNo ratings yet
- Adaptive Learning-Based Model Predictive Control For Uncertain Interconnected Systems: A Set Membership Identification ApproachDocument11 pagesAdaptive Learning-Based Model Predictive Control For Uncertain Interconnected Systems: A Set Membership Identification ApproachOBXONo ratings yet
- Ieee VPPC NpabDocument5 pagesIeee VPPC NpabLâm BảoNo ratings yet
- PCACCSMDec 2021Document33 pagesPCACCSMDec 2021devin.ezekiel2003No ratings yet
- Task-Optimal Data-Driven Surrogate Models For eNMPC Via Differentiable Simulation and OptimizationDocument6 pagesTask-Optimal Data-Driven Surrogate Models For eNMPC Via Differentiable Simulation and OptimizationlarrylynnmailNo ratings yet
- ISA Transactions: Peyman Sindareh Esfahani, Jeffrey Kurt PieperDocument11 pagesISA Transactions: Peyman Sindareh Esfahani, Jeffrey Kurt PieperLuis CarvalhoNo ratings yet
- 2011 Garcia Vilas Santos Alonso JJPC BWDocument50 pages2011 Garcia Vilas Santos Alonso JJPC BWCristian CanazaNo ratings yet
- CSTR LMPC Vs NMPCDocument6 pagesCSTR LMPC Vs NMPCgverma9461No ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Scenario-Based MPC With Gradual Relaxation of Output ConstraintsDocument5 pagesScenario-Based MPC With Gradual Relaxation of Output ConstraintsAndrés CeverisaeNo ratings yet
- Loquasto IECDocument47 pagesLoquasto IECAllel BradleyNo ratings yet
- Neural Network MPCDocument8 pagesNeural Network MPCluzpachecoblNo ratings yet
- Fast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGADocument13 pagesFast Linear Parameter Varying Model Predictive Control of Buck DC-DC Converters Based On FPGAnhatvpNo ratings yet
- Incorporating Recurrent Reinforcement Learning Into Model PredictiveDocument7 pagesIncorporating Recurrent Reinforcement Learning Into Model Predictivekevin.k.xuNo ratings yet
- Augmenting MPC Schemes With Active Learning: Intuitive Tuning and Guaranteed PerformanceDocument7 pagesAugmenting MPC Schemes With Active Learning: Intuitive Tuning and Guaranteed PerformanceSupriya DiwanNo ratings yet
- Basic Principles of MPCDocument13 pagesBasic Principles of MPCÉdgar StaveNo ratings yet
- Distributed Control Strategy of Microgrid Based On The Concept of Cyber Physical SystemDocument23 pagesDistributed Control Strategy of Microgrid Based On The Concept of Cyber Physical SystemNAAC sstcNo ratings yet
- Local Koopman Operators For Data-Driven Control of Robotic SystemsDocument9 pagesLocal Koopman Operators For Data-Driven Control of Robotic SystemsbadrinrNo ratings yet
- A Comparison of Distributed Optimal Power Flow AlgorithmsDocument6 pagesA Comparison of Distributed Optimal Power Flow AlgorithmsVemalaiah KasiNo ratings yet
- CAN BusDocument10 pagesCAN BussamirElectroNo ratings yet
- LMI-Based Robust Predictive Load Frequency Control For Power Systems With Communication DelaysDocument10 pagesLMI-Based Robust Predictive Load Frequency Control For Power Systems With Communication Delaysjitenderkumar_goyal28No ratings yet
- Attitude Stabilization With Actuators Subject To Switching-Time Constraints Using Explicit MPCDocument8 pagesAttitude Stabilization With Actuators Subject To Switching-Time Constraints Using Explicit MPCMarcello AlmeidaNo ratings yet
- Disturbance-Observer-Based Control For Semi-Markovian Jump Systems With Generally Uncertain Transition Rate and Saturation NonlinearityDocument16 pagesDisturbance-Observer-Based Control For Semi-Markovian Jump Systems With Generally Uncertain Transition Rate and Saturation NonlinearityAravinth NarayananNo ratings yet
- Assessing Finite-Control-Set Model Predictive ControlDocument9 pagesAssessing Finite-Control-Set Model Predictive ControlPhan Thanh VanNo ratings yet
- An Implementable Stabilizing Model Predictive Controller Applied To A Rotary - COENGPRACDocument10 pagesAn Implementable Stabilizing Model Predictive Controller Applied To A Rotary - COENGPRACBruno AguiarNo ratings yet
- Robust Sliding Mode Control For Robot ManipulatorsDocument10 pagesRobust Sliding Mode Control For Robot Manipulatorshoàng nguyễnNo ratings yet
- Gao Flow Contrastive Estimation of Energy-Based Models CVPR 2020 PaperDocument11 pagesGao Flow Contrastive Estimation of Energy-Based Models CVPR 2020 PaperPhilippe EslingNo ratings yet
- Applied Sciences: Switched Auto-Regressive Neural Control (S-ANC) For Energy Management of Hybrid MicrogridsDocument23 pagesApplied Sciences: Switched Auto-Regressive Neural Control (S-ANC) For Energy Management of Hybrid Microgridsifpm saidiNo ratings yet
- Robustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopDocument8 pagesRobustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopMuhammad Mazhar BashirNo ratings yet
- An Optimal Model Predictive Control Method For FivDocument10 pagesAn Optimal Model Predictive Control Method For FivXuân Phú PhạmNo ratings yet
- A Receding Horizon Generalization of Pointwise Min-Norm ControllersDocument12 pagesA Receding Horizon Generalization of Pointwise Min-Norm ControllersdgsdfjkgdfjksnNo ratings yet
- Nonlinear Model Predictive Control - From - Theory - To - Application PDFDocument18 pagesNonlinear Model Predictive Control - From - Theory - To - Application PDFAnjing ChengNo ratings yet
- Multi-Task Correlation Particle Filter For Robust Object TrackingDocument9 pagesMulti-Task Correlation Particle Filter For Robust Object TrackingharisNo ratings yet
- MPC For MCPDocument7 pagesMPC For MCPmartinapamNo ratings yet
- Damour Et Al-2014-Fuel Cells PDFDocument8 pagesDamour Et Al-2014-Fuel Cells PDFDavid Mas LopezNo ratings yet
- Nonlinear Model Predictive Control For Mobile RoboDocument21 pagesNonlinear Model Predictive Control For Mobile RoboNguyen Duc AnhNo ratings yet
- PhyCom 2018 PDFDocument22 pagesPhyCom 2018 PDFأبو أيوب تافيلالتNo ratings yet
- Design and Implementation of Adaptive Signal Processing Systems Using Markov Decision ProcessesDocument6 pagesDesign and Implementation of Adaptive Signal Processing Systems Using Markov Decision ProcessesArif ZafarNo ratings yet
- Proceedings 0137Document6 pagesProceedings 0137Andres HernandezNo ratings yet
- A Model Predictive Current Controller With ImproveDocument12 pagesA Model Predictive Current Controller With ImproveDũng ĐàoNo ratings yet
- SVC Dynamic Analytical Model: D.Jovcic, Member, IEEE, N.Pahalawaththa, Member IEEE, M.Zavahir, Member IEEE, H.HassanDocument7 pagesSVC Dynamic Analytical Model: D.Jovcic, Member, IEEE, N.Pahalawaththa, Member IEEE, M.Zavahir, Member IEEE, H.Hassanhamza mandlwiNo ratings yet
- Main Fan Et Al. 2011Document5 pagesMain Fan Et Al. 2011mkawserNo ratings yet
- Model-Based Adaptive Critic Designs: Editor's SummaryDocument31 pagesModel-Based Adaptive Critic Designs: Editor's SummaryioncopaeNo ratings yet
- Optimal Controller Synthesis For Nonlinear Dynamical SystemsDocument7 pagesOptimal Controller Synthesis For Nonlinear Dynamical SystemsFernando OrnelasNo ratings yet
- FCMAC: A Fuzzified Cerebellar Model Articulation Controller With Self-Organizing CapacityDocument10 pagesFCMAC: A Fuzzified Cerebellar Model Articulation Controller With Self-Organizing CapacityDalia MuraddNo ratings yet
- 1.5 - Starting and Stopping Methods-4Document48 pages1.5 - Starting and Stopping Methods-4luzpachecoblNo ratings yet
- 1.2 - Simbology in Electric Drives-2Document26 pages1.2 - Simbology in Electric Drives-2luzpachecoblNo ratings yet
- Lesson 3. Manipulator DynamicsDocument31 pagesLesson 3. Manipulator DynamicsluzpachecoblNo ratings yet
- Electronics 12 00143 v2Document19 pagesElectronics 12 00143 v2luzpachecoblNo ratings yet
- Flores RPIDocument4 pagesFlores RPIluzpachecoblNo ratings yet
- Course Orientation: Teaching Beyond The Box: Empowering Science and Mathematics Teachers For Improved TeachingDocument14 pagesCourse Orientation: Teaching Beyond The Box: Empowering Science and Mathematics Teachers For Improved Teachingjose gamasNo ratings yet
- CWA-Class Work Assessment, MSA - Mid Semester Assessment, ESA - End Semester AssessmentDocument1 pageCWA-Class Work Assessment, MSA - Mid Semester Assessment, ESA - End Semester AssessmentAnjaliNo ratings yet
- Emotion Theory and Research - Highlights, Unanswered Questions, and Emerging IssuesDocument29 pagesEmotion Theory and Research - Highlights, Unanswered Questions, and Emerging IssuesAna Maria ForeroNo ratings yet
- Self-Regulation and Research Writing Competencies of Senior High School StudentsDocument11 pagesSelf-Regulation and Research Writing Competencies of Senior High School StudentsPsychology and Education: A Multidisciplinary JournalNo ratings yet
- Epp-He 6Document41 pagesEpp-He 6Daisy L. TorresNo ratings yet
- 3 Writing Business Letters and MemosDocument22 pages3 Writing Business Letters and MemosReignheart Mae BartolataNo ratings yet
- TLE IA Week3Document3 pagesTLE IA Week3Dorina N Eurellah DavidNo ratings yet
- Ni Lab Midterm Exam Reviewer PDFDocument256 pagesNi Lab Midterm Exam Reviewer PDFNigos Khim CyrilNo ratings yet
- Iso 5725-2 EspanolDocument2 pagesIso 5725-2 Espanoljael dobbyNo ratings yet
- Unit # 02Document23 pagesUnit # 02ilyasNo ratings yet
- Language and Cognition: Preface and Acknowledgments List of ContributorsDocument4 pagesLanguage and Cognition: Preface and Acknowledgments List of ContributorsMarci KalozNo ratings yet
- OHS Book of Knowledge Chapter 12.1 Systems and STDocument48 pagesOHS Book of Knowledge Chapter 12.1 Systems and STharshilpateldshsNo ratings yet
- UNIT III - Activity 2 Direction: Draft A Sample of Outcome-Based Curriculum Plan Imbued With 21 Sample OBE Curriculum PlanDocument9 pagesUNIT III - Activity 2 Direction: Draft A Sample of Outcome-Based Curriculum Plan Imbued With 21 Sample OBE Curriculum PlanMelmel TheKnight50% (2)
- Suyog Kumar Sethia: Professional SummaryDocument3 pagesSuyog Kumar Sethia: Professional SummarysarfiNo ratings yet
- Case Study of AI SystemDocument5 pagesCase Study of AI SystemPrincess Wella Mae TibonNo ratings yet
- (9789004505742 - An Introduction To Islamic Psychology) Preliminary MaterialDocument10 pages(9789004505742 - An Introduction To Islamic Psychology) Preliminary MaterialAsma HashmiNo ratings yet
- Business Research Week12Document54 pagesBusiness Research Week12Amabelle AbapoNo ratings yet
- Business Ethics &Document2 pagesBusiness Ethics &Devyn RoundyNo ratings yet
- Thesis Dissertation OutlinesDocument3 pagesThesis Dissertation OutlinesMichael AñodaNo ratings yet
- Unit 4-L1Document14 pagesUnit 4-L1technical analysisNo ratings yet
- Di Paola Hoy 2005Document12 pagesDi Paola Hoy 2005Nurulhudda ArshadNo ratings yet
- Q.1 Explain The Concept Nature and Scope of Psychology. How Does An Educational Psychology Help The Teacher For Effective Teaching? What Is Educational Psychology?Document26 pagesQ.1 Explain The Concept Nature and Scope of Psychology. How Does An Educational Psychology Help The Teacher For Effective Teaching? What Is Educational Psychology?Bukhari EnterprisesNo ratings yet
- GE6103 Living in The IT Era Midterm Quiz 1 - Attempt ReviewDocument4 pagesGE6103 Living in The IT Era Midterm Quiz 1 - Attempt ReviewChristian TeroNo ratings yet
- 1.1 WATTS Everything Is Obvious PREFACEDocument7 pages1.1 WATTS Everything Is Obvious PREFACEGerard Gracià CapelladesNo ratings yet
- Cash Stankovic Storga EDR 2016 PDFDocument17 pagesCash Stankovic Storga EDR 2016 PDFLEONARD FERNANDO ABELLA LORZA100% (1)
- What Kind of School Did You Go ToDocument11 pagesWhat Kind of School Did You Go ToHai Anh NguyenNo ratings yet
- Highest Response Ratio Next (HRRN) Vs First Come First Served (FCFS) Scheduling Algorithm in Grid EnvironmentDocument757 pagesHighest Response Ratio Next (HRRN) Vs First Come First Served (FCFS) Scheduling Algorithm in Grid EnvironmentJeevanaNo ratings yet
- Argumentative EssayDocument1 pageArgumentative EssaylucreziaNo ratings yet
- Action Research EsPDocument6 pagesAction Research EsPMar LenNo ratings yet
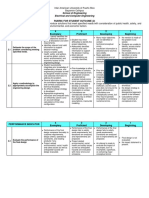
- Rubric For Student Outcome 2Document2 pagesRubric For Student Outcome 2Ruben Flores FloresNo ratings yet