You might also like
- 01234706Document7 pages01234706memotronikNo ratings yet
- Detailed Modeling of CIGRÉ HVDC Benchmark System Using PSCADEMTDC and PSBSIMULINKDocument10 pagesDetailed Modeling of CIGRÉ HVDC Benchmark System Using PSCADEMTDC and PSBSIMULINKArturo Isidro Conde PérezNo ratings yet
- 2010 Silva Power Grid Simulation (15132)Document10 pages2010 Silva Power Grid Simulation (15132)Fidel ParedesNo ratings yet
- SVC Dynamic Modeling for Stability AnalysisDocument1 pageSVC Dynamic Modeling for Stability Analysiswvargas926No ratings yet
- Objects Tab For Power Systems ModelingDocument8 pagesObjects Tab For Power Systems ModelingVHLIMEUNo ratings yet
- Dunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Document10 pagesDunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Easy Energy SACNo ratings yet
- Generator Model Extension For Higher Accuracy Simulation of Powe 2017Document7 pagesGenerator Model Extension For Higher Accuracy Simulation of Powe 2017Fernando SalinasNo ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Phasor Modeling Approaches and Simulation Guidelines of Voltage-Source Converters in Grid-Integration StudiesDocument13 pagesPhasor Modeling Approaches and Simulation Guidelines of Voltage-Source Converters in Grid-Integration Studiesdemy antonyNo ratings yet
- Effects of Limits in Small Signal Stability Analysis of Power SystemsDocument6 pagesEffects of Limits in Small Signal Stability Analysis of Power SystemsAshish DuttaNo ratings yet
- Valve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodDocument8 pagesValve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodsivaNo ratings yet
- Loewner Method PDFDocument10 pagesLoewner Method PDFkillerbee96No ratings yet
- Model Predictive Control of Distillation Column Based Recursive Parameter Estimation Method Using HYSYS SimulationDocument4 pagesModel Predictive Control of Distillation Column Based Recursive Parameter Estimation Method Using HYSYS Simulationdicky julistianNo ratings yet
- Use These Methods Synthesis of Damp-: Try ForDocument5 pagesUse These Methods Synthesis of Damp-: Try ForFelix GamarraNo ratings yet
- Specification-Guided Controller Synthesis For Linear Systems and Safe Linear-Time Temporal LogicDocument10 pagesSpecification-Guided Controller Synthesis For Linear Systems and Safe Linear-Time Temporal LogicmatzeSCRIBDNo ratings yet
- Alfonso-Gil Et Al 2013Document12 pagesAlfonso-Gil Et Al 2013PRCNo ratings yet
- Modellinfg of Pmu PDFDocument10 pagesModellinfg of Pmu PDFRamesh KannanNo ratings yet
- A Modeling Methodology For Robust Stability Analysis of Nonlinear Electrical Power Systems Under Parameter UncertaintiesDocument10 pagesA Modeling Methodology For Robust Stability Analysis of Nonlinear Electrical Power Systems Under Parameter UncertaintiesShivam SinghNo ratings yet
- FACTS Stability DIgSILENTDocument6 pagesFACTS Stability DIgSILENTAlberto JimenezNo ratings yet
- Modern Distribution Management System Volt/Var ControlDocument7 pagesModern Distribution Management System Volt/Var ControlAsja AvdićNo ratings yet
- Application of Singular Perturbations Theory To Power System Modeling and Stability AnalysisDocument7 pagesApplication of Singular Perturbations Theory To Power System Modeling and Stability AnalysisGayathri GnanaiyaNo ratings yet
- Technichal Report: Adaptive Control For Linearizable Systems Using On-Policy Reinforcement LearningDocument17 pagesTechnichal Report: Adaptive Control For Linearizable Systems Using On-Policy Reinforcement LearningNguyễn Xuân KhảiNo ratings yet
- DCDC JohnsonDocument10 pagesDCDC JohnsonJulio Cesar Tapia ReyesNo ratings yet
- Information Sciences: Gérard Bloch, Fabien Lauer, Guillaume Colin, Yann ChamaillardDocument15 pagesInformation Sciences: Gérard Bloch, Fabien Lauer, Guillaume Colin, Yann ChamaillardThejaswiniNo ratings yet
- Multi ConverterDocument17 pagesMulti Convertersan_misusNo ratings yet
- Gaussian Process-Based Predictive ControDocument12 pagesGaussian Process-Based Predictive ContronhatvpNo ratings yet
- Complex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersDocument15 pagesComplex State-Space Modeling and Nonlinear Control of Active Front-End ConvertersMaikPortnoyNo ratings yet
- Robustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopDocument8 pagesRobustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopMuhammad Mazhar BashirNo ratings yet
- Measurement: Ankush Chakrabarty, Suvadeep Banerjee, Sayan Maity, Amitava ChatterjeeDocument14 pagesMeasurement: Ankush Chakrabarty, Suvadeep Banerjee, Sayan Maity, Amitava ChatterjeeKhuleedShaikhNo ratings yet
- Tolerante A FallosDocument10 pagesTolerante A FallosDaniel SanchezNo ratings yet
- se-02Document8 pagesse-02lauraaaNo ratings yet
- A Comprehensive Computer Program For Small Signal Stability Analysis of Power SystemsDocument8 pagesA Comprehensive Computer Program For Small Signal Stability Analysis of Power SystemsphieuxuatkhoNo ratings yet
- Distributed Real Time Architecture For D PDFDocument8 pagesDistributed Real Time Architecture For D PDFskwNo ratings yet
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDocument7 pagesGain and Phase Margin Multiloop LQG Regulators: TheoryReta JibatNo ratings yet
- Robust Control IssuesDocument61 pagesRobust Control IssuesinnoodiraNo ratings yet
- Ocean Engineering: Josh Davidson, Simone Giorgi, John V. RingwoodDocument9 pagesOcean Engineering: Josh Davidson, Simone Giorgi, John V. RingwoodAmelia Agista PutriNo ratings yet
- On Projection-Based Algorithms For Model-Order Reduction of InterconnectsDocument23 pagesOn Projection-Based Algorithms For Model-Order Reduction of InterconnectsKb NguyenNo ratings yet
- 2010 MdRozali PID Controller Design For An Industrial HydraulicDocument6 pages2010 MdRozali PID Controller Design For An Industrial Hydraulicnur husnina mohd aliNo ratings yet
- Adaptive Model Predictive Control of Multivariable Time-Varying SystemsDocument13 pagesAdaptive Model Predictive Control of Multivariable Time-Varying SystemsDavid AkomolafeNo ratings yet
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocument6 pagesTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoNo ratings yet
- Design of Robust Repetitive Controllers Based On Convex Optimization With An Application To Power ElectronicsDocument4 pagesDesign of Robust Repetitive Controllers Based On Convex Optimization With An Application To Power ElectronicsAndré Lima CitadinNo ratings yet
- Multimachine Power System Stabiliser Design Based On New ApproachDocument9 pagesMultimachine Power System Stabiliser Design Based On New ApproachUsman AliNo ratings yet
- Sparse and Numerically Stable Implementation of A Distribution System State Estimation Based On Multifrontal QR FactorizationDocument8 pagesSparse and Numerically Stable Implementation of A Distribution System State Estimation Based On Multifrontal QR FactorizationM8ow6fNo ratings yet
- Robust and Adaptive Estimation of State of Charge For Lithium-Ion BatteriesDocument10 pagesRobust and Adaptive Estimation of State of Charge For Lithium-Ion Batteriesi.lachgar9407No ratings yet
- Supply Chain Simulation: Experiences From Two Case Studies: KeywordsDocument6 pagesSupply Chain Simulation: Experiences From Two Case Studies: KeywordsJoel MtimaNo ratings yet
- On The Practical Design of A Sliding Mode Voltage Controlled Buck ConverterDocument13 pagesOn The Practical Design of A Sliding Mode Voltage Controlled Buck ConverterJessica RossNo ratings yet
- Paper4 Asian Journal of Control Volume 7 Issue Number 3 Page(s) 323-329Document7 pagesPaper4 Asian Journal of Control Volume 7 Issue Number 3 Page(s) 323-329Nguyen Quang ThuanNo ratings yet
- A Gradient-Based Approach For Power System Design Using Electromagnetic Transient SimulationDocument5 pagesA Gradient-Based Approach For Power System Design Using Electromagnetic Transient SimulationBarron JhaNo ratings yet
- Application of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionDocument10 pagesApplication of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionROHIT SINGHNo ratings yet
- 06142134Document10 pages06142134ebrahimNo ratings yet
- Control Design of Mixed Sensitivity Problem For EdDocument14 pagesControl Design of Mixed Sensitivity Problem For EdRahmi ArslanNo ratings yet
- IET Power Electronics - 2021 - Saadat - Adaptive Neuro Fuzzy Inference Systems ANFIS Controller Design On Single PhaseDocument14 pagesIET Power Electronics - 2021 - Saadat - Adaptive Neuro Fuzzy Inference Systems ANFIS Controller Design On Single PhaseMahdi HERMASSINo ratings yet
- A4 Vovos Amathematicalmodelfordynamic....Document10 pagesA4 Vovos Amathematicalmodelfordynamic....Tharun KumarNo ratings yet
- Applying Model Checking in The Verification of A Clock Masking UnitDocument5 pagesApplying Model Checking in The Verification of A Clock Masking UnitNguyen Van ToanNo ratings yet
- Jiang 2017Document14 pagesJiang 2017Luis CarvalhoNo ratings yet
- LMI relaxations for data-driven control of switched affine systemsDocument21 pagesLMI relaxations for data-driven control of switched affine systemssumeet sahuNo ratings yet
- Aircraft Electrical System DesignDocument7 pagesAircraft Electrical System Designgyanendra_vatsa4380No ratings yet
- State-space model of grid-connected inverters under current controlDocument10 pagesState-space model of grid-connected inverters under current controloussama sadkiNo ratings yet
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- Review of TSR As A SVC For Reactive Power Compensation in Transmission LineDocument3 pagesReview of TSR As A SVC For Reactive Power Compensation in Transmission Linehamza mandlwiNo ratings yet
- MATLAB in 6 HoursDocument46 pagesMATLAB in 6 Hourshamza mandlwiNo ratings yet
- Power System Stability: by A. Prof. Dr. Mohammed Jasim MDocument33 pagesPower System Stability: by A. Prof. Dr. Mohammed Jasim Mhamza mandlwiNo ratings yet
- Mitigation of SMIB Oscillations Using PSS Based On Particle Swarm Optimization AlgorithmDocument7 pagesMitigation of SMIB Oscillations Using PSS Based On Particle Swarm Optimization Algorithmhamza mandlwiNo ratings yet
- Understanding VSC-HVDC Controller Tuning TechniquesDocument8 pagesUnderstanding VSC-HVDC Controller Tuning TechniqueslalitbickNo ratings yet
- Size of DOL-Star Delta Starter Parts (10.6.13)Document11 pagesSize of DOL-Star Delta Starter Parts (10.6.13)hamza mandlwiNo ratings yet
- Simulation and Implementation of FC-TCR: Sumit K Rathor (IEEE Member), Chintan Patel, Mithila S ZodapeDocument10 pagesSimulation and Implementation of FC-TCR: Sumit K Rathor (IEEE Member), Chintan Patel, Mithila S Zodapehamza mandlwiNo ratings yet
- Performance Simulation of Very Long Transmission Line With SVC at Mid PointDocument3 pagesPerformance Simulation of Very Long Transmission Line With SVC at Mid Pointeng powerNo ratings yet
- Automatic Tuning of Proportional-Integral-Derivative (Pid) Controller Using Particle Swarm Optimization (Pso) AlgorithmDocument10 pagesAutomatic Tuning of Proportional-Integral-Derivative (Pid) Controller Using Particle Swarm Optimization (Pso) AlgorithmAdam HansenNo ratings yet
- Performance Simulation of Very Long Transmission Line With SVC at Mid PointDocument3 pagesPerformance Simulation of Very Long Transmission Line With SVC at Mid Pointeng powerNo ratings yet
- Wire Size Calculator - Calculate Voltage Drop and Required Wire GaugeDocument2 pagesWire Size Calculator - Calculate Voltage Drop and Required Wire Gaugehamza mandlwiNo ratings yet
- Selection of Main CB and Branch CBDocument25 pagesSelection of Main CB and Branch CBhamza mandlwiNo ratings yet
- Undersanding Power FactorDocument35 pagesUndersanding Power FactorAdel Abd-ElhamidNo ratings yet
- محولات توزيع 11-0.4 كي فيDocument13 pagesمحولات توزيع 11-0.4 كي فيhamza mandlwiNo ratings yet
- Interarea Oscillations & Chimera in Power Systems Modeled by CC-Kuramoto FrameworkDocument11 pagesInterarea Oscillations & Chimera in Power Systems Modeled by CC-Kuramoto Frameworkhamza mandlwiNo ratings yet
- 36 VoltageDocument6 pages36 VoltageriteshtiroleNo ratings yet
- Power System Performance Improvement by Using An SVC Device: February 2015Document7 pagesPower System Performance Improvement by Using An SVC Device: February 2015hamza mandlwiNo ratings yet
- Aim: Apparatus Required: Theory:-: Demonstration Dynamic Response of The STATCOMDocument4 pagesAim: Apparatus Required: Theory:-: Demonstration Dynamic Response of The STATCOMhamza mandlwiNo ratings yet
- ECE57Document6 pagesECE57وليد ابو شاكرNo ratings yet
- RL RLC Load 222Document3 pagesRL RLC Load 222hamza mandlwiNo ratings yet
- Simulate Simple CircuitDocument3 pagesSimulate Simple Circuithamza mandlwiNo ratings yet
- Group 7 SVC and StatcomDocument15 pagesGroup 7 SVC and Statcomhamza mandlwiNo ratings yet
- Application of The PSAT An Open Source Software For Educational and Research PurposesDocument8 pagesApplication of The PSAT An Open Source Software For Educational and Research Purposeshamza mandlwiNo ratings yet
- LQR Tuning of Static Var Compensator ForDocument6 pagesLQR Tuning of Static Var Compensator Forhamza mandlwiNo ratings yet
- Simulate Simple CircuitDocument3 pagesSimulate Simple Circuithamza mandlwiNo ratings yet
- Static VAR Compensator: Merus - SVCDocument8 pagesStatic VAR Compensator: Merus - SVChamza mandlwiNo ratings yet
- Improving Power Transfer Capability and Oscillation Damping of Parallel Transmission Lines by Using Interline Unified Power Flow ControllerDocument10 pagesImproving Power Transfer Capability and Oscillation Damping of Parallel Transmission Lines by Using Interline Unified Power Flow Controllerhamza mandlwiNo ratings yet
- Raj Duhan1Document4 pagesRaj Duhan1hamza mandlwiNo ratings yet
- User GuideDocument14 pagesUser Guidenayla amarNo ratings yet
- Holt Physics Equations SummaryDocument2 pagesHolt Physics Equations SummaryMAXWELL VOGEL50% (2)
- Manual: BP13370 - NT - 10000 - Englisch 23.11.2005 17:40 Uhr Seite 1Document82 pagesManual: BP13370 - NT - 10000 - Englisch 23.11.2005 17:40 Uhr Seite 1Tokamanis HarrisNo ratings yet
- CHAPTER 2 Electric FieldsDocument36 pagesCHAPTER 2 Electric FieldsSathya Gananaathaa SattiamurtiNo ratings yet
- Street Light AutomationDocument2 pagesStreet Light AutomationYamral WubetuNo ratings yet
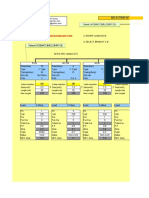
- Diagramas Unifilares 25055Document6 pagesDiagramas Unifilares 25055Yerko Navarro FloresNo ratings yet
- Electrical ExamDocument4 pagesElectrical ExamShahida Babeesh100% (1)
- Phase Sequence Relays, 200 - 500 V AC, 50/60 HZ Part No. EMR6-F500-G-1 Catalog No. 184789 Eaton Catalog No. EMR6-F500-G-1Document3 pagesPhase Sequence Relays, 200 - 500 V AC, 50/60 HZ Part No. EMR6-F500-G-1 Catalog No. 184789 Eaton Catalog No. EMR6-F500-G-1quangp4No ratings yet
- FP 6321Document11 pagesFP 6321Ahmed HussainNo ratings yet
- Radionics The Black Box and Other Psychic GeneratorsDocument14 pagesRadionics The Black Box and Other Psychic GeneratorsStellaEstel100% (1)
- Manual Hardware Lenovo Yoga BookDocument68 pagesManual Hardware Lenovo Yoga BookRADU OCTAVIAN100% (2)
- MAGLEV - Magnetic Levitation TechnologyDocument25 pagesMAGLEV - Magnetic Levitation TechnologyAyanBiswas22No ratings yet
- 2.5l Petrol Engine, DAZA: Current Flow DiagramDocument24 pages2.5l Petrol Engine, DAZA: Current Flow DiagramildefonsoNo ratings yet
- Lab ProjectDocument4 pagesLab ProjectdevakisvaniNo ratings yet
- Flyer Ingepac RioDocument2 pagesFlyer Ingepac RioJuanma García EspinosaNo ratings yet
- V-Pol - 4 Stacked Center Fed Dipole Array - Elliptical - 8.5 DBDDocument1 pageV-Pol - 4 Stacked Center Fed Dipole Array - Elliptical - 8.5 DBDpandavision76No ratings yet
- Electrical Installation Inspection PlanDocument17 pagesElectrical Installation Inspection PlanPiyawat Pimol67% (3)
- Reb5 EDocument468 pagesReb5 EFeigin Leonid100% (1)
- Physics - PN Junction Diode and its ApplicationsDocument15 pagesPhysics - PN Junction Diode and its ApplicationsNidhiNo ratings yet
- Colour Television Video Combination TX-21GV1C TX-14GV1C Z-421V ChassisDocument63 pagesColour Television Video Combination TX-21GV1C TX-14GV1C Z-421V ChassisRony PmlNo ratings yet
- EN50272 enDocument1 pageEN50272 enRadu JuneNo ratings yet
- Man optoCONTROL 2500 en PDFDocument62 pagesMan optoCONTROL 2500 en PDFAdrian Prashantha WeerakkodyNo ratings yet
- SMPS Charge pump power supply for tubesDocument5 pagesSMPS Charge pump power supply for tubesmoma52No ratings yet
- Powerware 9155 - 8-30 - kVA - and - 9355 - 8-40 - kVADocument8 pagesPowerware 9155 - 8-30 - kVA - and - 9355 - 8-40 - kVASERVISNo ratings yet
- BDS-40 Install Guide 4200 045 R6 IIDocument64 pagesBDS-40 Install Guide 4200 045 R6 IIJairo Alirio Cultid InsuastyNo ratings yet
- Signal Conditioning Op-AmpsDocument41 pagesSignal Conditioning Op-AmpsSaleem Haddad100% (1)
- 1SDC200006D0209 - Emax en PDFDocument276 pages1SDC200006D0209 - Emax en PDFAhmad Hamouda100% (1)
- Acopian 2012 CatalogDocument96 pagesAcopian 2012 Catalogcuriqueo88No ratings yet
- Question Bank Class Xii PhysicsDocument151 pagesQuestion Bank Class Xii PhysicsYogesh BansalNo ratings yet
- Mutual InductanceDocument13 pagesMutual Inductancecrazy sdNo ratings yet
- Experiments - VLab - Physics (BS-PH191)Document2 pagesExperiments - VLab - Physics (BS-PH191)Dr.Krishna BhowalNo ratings yet