You might also like
- Basic Number Theory - Andre Weil PDFDocument336 pagesBasic Number Theory - Andre Weil PDFOmar Guzman67% (3)
- Robust MPC for Discrete-Time MJLSs With Operation Mode DisorderingDocument13 pagesRobust MPC for Discrete-Time MJLSs With Operation Mode DisorderingnhatvpNo ratings yet
- Mathematics 11 00487 v3Document14 pagesMathematics 11 00487 v3Algoritma PemrogramanNo ratings yet
- A Novel Fractional Order Multiple ModelDocument19 pagesA Novel Fractional Order Multiple Modeldavid teacherNo ratings yet
- TSP Cmes 41283Document25 pagesTSP Cmes 41283ranim najibNo ratings yet
- Decentralized Adaptive Control of Nonlinear Large-Scale Pure-Feedback Interconnected Systems With Time-Varying DelaysDocument17 pagesDecentralized Adaptive Control of Nonlinear Large-Scale Pure-Feedback Interconnected Systems With Time-Varying DelaysMakis MathsNo ratings yet
- Extended Dissipative Sliding Mode Control For Nonlinear Networked Control Systems Via Event-Triggered Mechanism With Random Uncertain MeasurementDocument16 pagesExtended Dissipative Sliding Mode Control For Nonlinear Networked Control Systems Via Event-Triggered Mechanism With Random Uncertain MeasurementBharathNo ratings yet
- Local_robust_stability_on_compact_set_for_nonlineaDocument11 pagesLocal_robust_stability_on_compact_set_for_nonlineaasadNo ratings yet
- Observer-Based Adaptive Fuzzy Backstepping Dynamic Surface Control For A Class of MIMO Nonlinear SystemsDocument12 pagesObserver-Based Adaptive Fuzzy Backstepping Dynamic Surface Control For A Class of MIMO Nonlinear Systemstidjani73No ratings yet
- Optimization Landscape of Quantum Control SystemsDocument14 pagesOptimization Landscape of Quantum Control SystemsLucas Adriano Maciel Dos SantosNo ratings yet
- Designing stable observers for LTI systems and Lipschitz systems with bounded nonlinearitiesDocument12 pagesDesigning stable observers for LTI systems and Lipschitz systems with bounded nonlinearitiesPanagiotis PapageorgiouNo ratings yet
- 01 International Journal of Control 2017 Robust Model Predictive Control For Constrained Continuous Time NonlinearDocument17 pages01 International Journal of Control 2017 Robust Model Predictive Control For Constrained Continuous Time NonlinearNguyễn Xuân KhảiNo ratings yet
- LMI relaxations for data-driven control of switched affine systemsDocument21 pagesLMI relaxations for data-driven control of switched affine systemssumeet sahuNo ratings yet
- Robust stabilization of underactuated mechanical systemsDocument18 pagesRobust stabilization of underactuated mechanical systemsAsdewq LocoNo ratings yet
- Information Sciences: Xiaoqi Song, James Lam, Bohao Zhu, Chenchen FanDocument16 pagesInformation Sciences: Xiaoqi Song, James Lam, Bohao Zhu, Chenchen Fan陈爱军No ratings yet
- 2019 Free-Body-Diagram Method For The Uniqueness Analysis - PekalDocument18 pages2019 Free-Body-Diagram Method For The Uniqueness Analysis - PekalboomchikiboomingNo ratings yet
- Model Predictive Controller Tuning Via Eigenvalue Placement: Jorge L. Garriga and Masoud SoroushDocument6 pagesModel Predictive Controller Tuning Via Eigenvalue Placement: Jorge L. Garriga and Masoud Soroushapi-197704391No ratings yet
- Model Predictive Control For Nonlinear Systems in Takagi-Sugeno's Form Under Round-Robin ProtocolDocument20 pagesModel Predictive Control For Nonlinear Systems in Takagi-Sugeno's Form Under Round-Robin ProtocolLuis CarvalhoNo ratings yet
- Robust Model Predictive Control ThesisDocument4 pagesRobust Model Predictive Control Thesisafhbgohob100% (2)
- Design of A Stabilizing Controller For Discrete-Time Switched Delay Systems With Affine Parametric UncertaintiesDocument9 pagesDesign of A Stabilizing Controller For Discrete-Time Switched Delay Systems With Affine Parametric Uncertaintiesomar.aguilarNo ratings yet
- Vedula Xu 2009Document13 pagesVedula Xu 2009Vladimir VelascoNo ratings yet
- Chang 2002Document22 pagesChang 2002citianz2011No ratings yet
- (Deception) Sensor Our WRKDocument27 pages(Deception) Sensor Our WRKBharathNo ratings yet
- Information Sciences: Shaocheng Tong, Shuai Sui, Yongming LiDocument16 pagesInformation Sciences: Shaocheng Tong, Shuai Sui, Yongming LiAravindan MohanNo ratings yet
- Nonstationary Control For TS Fuzzy Markovian Switching Systems With Variable Quantization DensityDocument11 pagesNonstationary Control For TS Fuzzy Markovian Switching Systems With Variable Quantization Densitycscscs.789456No ratings yet
- Novel Explicit Time Integration Schemes For Effi 2020 International JournalDocument16 pagesNovel Explicit Time Integration Schemes For Effi 2020 International JournalWooram KimNo ratings yet
- Mechanical Systems and Signal Processing: Oriol Guasch, Carlos Garcı A, Jordi Jove, Pere Artı SDocument17 pagesMechanical Systems and Signal Processing: Oriol Guasch, Carlos Garcı A, Jordi Jove, Pere Artı SHarish ChandraNo ratings yet
- Automation 03 00003 With CoverDocument38 pagesAutomation 03 00003 With CoverMarcel NicolaNo ratings yet
- Robust Exponential Stability of Switched Delay Interconnected Systems Under Arbitrary SwitchingDocument18 pagesRobust Exponential Stability of Switched Delay Interconnected Systems Under Arbitrary SwitchingNo FaceNo ratings yet
- Dechter Constraint ProcessingDocument40 pagesDechter Constraint Processingnani subrNo ratings yet
- Optimal Control of Nonlinear Systems To Given OrbitsDocument14 pagesOptimal Control of Nonlinear Systems To Given OrbitsMi Đỗ Hoàng NgânNo ratings yet
- Jiang 2017Document14 pagesJiang 2017Luis CarvalhoNo ratings yet
- AIAA 2013 2567 CharestDocument21 pagesAIAA 2013 2567 Charestapoorvs75No ratings yet
- Intl J Robust Nonlinear - 2024 - Chang - Adaptive prescribed performance trackDocument19 pagesIntl J Robust Nonlinear - 2024 - Chang - Adaptive prescribed performance trackphanduNo ratings yet
- Observer Based Adaptive Neural Network Backstepping Sliding Mode Control For Switched Fractional Order Uncertain Nonlinear Systems With Unmeasured StatesDocument14 pagesObserver Based Adaptive Neural Network Backstepping Sliding Mode Control For Switched Fractional Order Uncertain Nonlinear Systems With Unmeasured StatesGzam RaïfaNo ratings yet
- Particle method refines control for nonlinear systems trackingDocument9 pagesParticle method refines control for nonlinear systems trackingatif6421724No ratings yet
- 2020 Utilization of The Moore-Penrose Inverse in The Modeling of - WojtyraDocument19 pages2020 Utilization of The Moore-Penrose Inverse in The Modeling of - WojtyraboomchikiboomingNo ratings yet
- Robust Multi-Model Predictive Controller for Distributed Parameter SystemsDocument50 pagesRobust Multi-Model Predictive Controller for Distributed Parameter SystemsCristian CanazaNo ratings yet
- Simulation Studies On The Design of Optimum PID Controllers To Suppress Chaotic Oscillations in A Family of Lorenz-Like Multi-Wing AttractorsDocument21 pagesSimulation Studies On The Design of Optimum PID Controllers To Suppress Chaotic Oscillations in A Family of Lorenz-Like Multi-Wing AttractorsjamesNo ratings yet
- (Studies in Systems Decision and Control 115) Fridman, Leonid_ Li, Shihua_ Man, Zhihong_ Wang, Xiangyu_ Yu, Xing Huo-Advances in Variable Structure Systems and Sliding Mode Control -- Theory and AppliDocument414 pages(Studies in Systems Decision and Control 115) Fridman, Leonid_ Li, Shihua_ Man, Zhihong_ Wang, Xiangyu_ Yu, Xing Huo-Advances in Variable Structure Systems and Sliding Mode Control -- Theory and AppliHipólito AguilarNo ratings yet
- The Existence of Optimal Control For Continuous-Time Markov Decision Processes in Random EnvironmentsDocument24 pagesThe Existence of Optimal Control For Continuous-Time Markov Decision Processes in Random EnvironmentsJose Gregorio Rodriguez VilarrealNo ratings yet
- Paper Semi MarkovDocument10 pagesPaper Semi MarkovQunalNo ratings yet
- 10 1109@pmaps 2018 8440361Document6 pages10 1109@pmaps 2018 8440361samundra24No ratings yet
- Luo 2018Document18 pagesLuo 2018Aritra DasguptaNo ratings yet
- Non-Markovian Quantum State Diffusion For Spin EnvironmentsDocument11 pagesNon-Markovian Quantum State Diffusion For Spin EnvironmentsMartta TervakoskiNo ratings yet
- Position Control For Permanent Magnet Synchronous Motor Based On Neural Network and Terminal Sliding Mode ControlDocument9 pagesPosition Control For Permanent Magnet Synchronous Motor Based On Neural Network and Terminal Sliding Mode ControlLê Đức ThịnhNo ratings yet
- Algoritmos GenéticosDocument10 pagesAlgoritmos GenéticosErick VegaNo ratings yet
- Thèse 2024-2Document3 pagesThèse 2024-2marco andres auzaNo ratings yet
- Direct Stability Analysis of Electric Power Systems Using Energy FunctionsDocument3 pagesDirect Stability Analysis of Electric Power Systems Using Energy Functionsez55No ratings yet
- A New Robust LMI-based Model Predictive Control For Continuous-Time Uncertain Nonlinear SystemsDocument13 pagesA New Robust LMI-based Model Predictive Control For Continuous-Time Uncertain Nonlinear SystemsLuis CarvalhoNo ratings yet
- Anticipating Synchronization With Machine LearningDocument10 pagesAnticipating Synchronization With Machine Learningchenyeyuge94No ratings yet
- Rossini MPSPBC 2011Document23 pagesRossini MPSPBC 2011Paulo BedaqueNo ratings yet
- Data-driven computation of molecular reaction coordinatesDocument24 pagesData-driven computation of molecular reaction coordinateshuevonomar05No ratings yet
- Electrical Power and Energy Systems: Hamed Shakouri G., Hamid Reza RadmaneshDocument11 pagesElectrical Power and Energy Systems: Hamed Shakouri G., Hamid Reza RadmaneshMahra Rizvani PratamaNo ratings yet
- Continuous-Review Tracking Policies For Dynamic Control of Stochastic NetworksDocument36 pagesContinuous-Review Tracking Policies For Dynamic Control of Stochastic Networksthu tranNo ratings yet
- Estimate Security Margins Using ANN on Simulation DataDocument4 pagesEstimate Security Margins Using ANN on Simulation Datafirst lastNo ratings yet
- Reliable Mixed H∞ and Passivity Control for Fuzzy Markovian Switching SystemsDocument12 pagesReliable Mixed H∞ and Passivity Control for Fuzzy Markovian Switching Systemsbalraj dNo ratings yet
- Stability Assessment of Power-Converter-Based AC Systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance EstimationDocument13 pagesStability Assessment of Power-Converter-Based AC Systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance EstimationLiz CastilloNo ratings yet
- Adaptive Super-Twisting Control for Mobile Wheeled Inverted Pendulum SystemsDocument17 pagesAdaptive Super-Twisting Control for Mobile Wheeled Inverted Pendulum SystemsHuy VũNo ratings yet
- 1 s2.0 S0266892023000607 MainDocument14 pages1 s2.0 S0266892023000607 MainIvan PrayogaNo ratings yet
- Computational Methods for Nonlinear Dynamical Systems: Theory and Applications in Aerospace EngineeringFrom EverandComputational Methods for Nonlinear Dynamical Systems: Theory and Applications in Aerospace EngineeringNo ratings yet
- Exercise Sheet 1 COMP-255 C++ Additional Exercises (Book Ch. 1, 2, 3, 4)Document2 pagesExercise Sheet 1 COMP-255 C++ Additional Exercises (Book Ch. 1, 2, 3, 4)prince12No ratings yet
- Digital Filters: Realization, Transfer Function and Frequency ResponseDocument13 pagesDigital Filters: Realization, Transfer Function and Frequency ResponsegezahegnNo ratings yet
- Numerical MethodsDocument8 pagesNumerical MethodsTanilay özdemirNo ratings yet
- Finding Divisors, Number of Divisors and Summation of DivisorsDocument8 pagesFinding Divisors, Number of Divisors and Summation of DivisorsMDRAKIB180 107No ratings yet
- EEE 3rd Semester Lesson Plan on Network Theory (BEES2211Document3 pagesEEE 3rd Semester Lesson Plan on Network Theory (BEES2211selvakumar2k20% (1)
- AdvancedCalculusJWThomas PDFDocument261 pagesAdvancedCalculusJWThomas PDFdamiesiksNo ratings yet
- Proof of Beal's ConjectureDocument4 pagesProof of Beal's ConjectureMichael TintNo ratings yet
- Principles of Combinatorics: N R N R N R N NDocument2 pagesPrinciples of Combinatorics: N R N R N R N NSilviuNo ratings yet
- Me N Mine Mathematics PDFDocument186 pagesMe N Mine Mathematics PDFVilva VivithaNo ratings yet
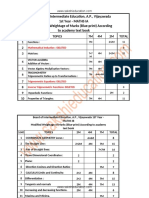
- Board of Intermediate Education, A.P., Vijayawada 1st Year - MATHS IA Modified Weightage BlueprintDocument4 pagesBoard of Intermediate Education, A.P., Vijayawada 1st Year - MATHS IA Modified Weightage BlueprintNookala Yaswanth123No ratings yet
- Klein BottleDocument7 pagesKlein BottleStella Seremetaki Pure MathematicianNo ratings yet
- Lelm 2nd PUCDocument81 pagesLelm 2nd PUCAarav MantripragadaNo ratings yet
- Imaginary and Complex NumbersDocument28 pagesImaginary and Complex NumbersZenonissya Galwan BataraNo ratings yet
- Paulus 11Document2 pagesPaulus 11Daniel BoenfieNo ratings yet
- LAS WEEK 2A-The NTH Term of A SequenceDocument2 pagesLAS WEEK 2A-The NTH Term of A SequenceZyra Catherine MoralesNo ratings yet
- L 06 Hankel TransformDocument11 pagesL 06 Hankel TransformimtiazNo ratings yet
- Polynomial Division JigsawDocument7 pagesPolynomial Division Jigsawapi-308627801No ratings yet
- JR Inter Pre Final - 1 Maths 1b QP Saibaba SirDocument2 pagesJR Inter Pre Final - 1 Maths 1b QP Saibaba SirSumanth RamisettyNo ratings yet
- HyperbolaDocument25 pagesHyperbolaparita adhiaNo ratings yet
- Revision Proof by InductionDocument15 pagesRevision Proof by InductionSaifulahmed49No ratings yet
- Calculus of A Single Variable MA 172Document86 pagesCalculus of A Single Variable MA 172Emmanuel NtiamoahNo ratings yet
- 73 VECTOR & 3D PART 6 of 6 PDFDocument9 pages73 VECTOR & 3D PART 6 of 6 PDFAbhiram ShajiNo ratings yet
- Curved, isoparametric quadrilateral elements improve finite element analysisDocument12 pagesCurved, isoparametric quadrilateral elements improve finite element analysisxkbukNo ratings yet
- Quadratic Equation - 01-60Document60 pagesQuadratic Equation - 01-60Pranjal ChawdaNo ratings yet
- Surds and Indices Chapter SummaryDocument28 pagesSurds and Indices Chapter SummaryashnaNo ratings yet
- Math Algebra 1 ExamDocument6 pagesMath Algebra 1 Examsabri lalaNo ratings yet
- For More Important Questions Visit:: Matrices and DeterminantsDocument16 pagesFor More Important Questions Visit:: Matrices and DeterminantsRishabhNo ratings yet
- Fraction NotesDocument51 pagesFraction NoteskushiNo ratings yet