You might also like
- Control Manual Lab 8Document12 pagesControl Manual Lab 8Hussain HadiNo ratings yet
- PID Control: Modeling Controls Tutorials Menu Root LocusDocument9 pagesPID Control: Modeling Controls Tutorials Menu Root LocusXavier Freire ZamoraNo ratings yet
- PID Design Method for DC Motor Speed ControlDocument10 pagesPID Design Method for DC Motor Speed ControlAbdullahNo ratings yet
- PID Design Method for DC Motor Speed ControlDocument10 pagesPID Design Method for DC Motor Speed ControlAbdullahNo ratings yet
- PID Control TheoryDocument17 pagesPID Control TheoryManuel Santos MNo ratings yet
- PI and PID Controllers for Cruise Control SystemDocument11 pagesPI and PID Controllers for Cruise Control SystemMuhammad AbbasiNo ratings yet
- Mizan Tepi Campus Lab Report Speed Control of DC MotorDocument16 pagesMizan Tepi Campus Lab Report Speed Control of DC MotorMelaku DinkuNo ratings yet
- Group 4 Lab 5Document16 pagesGroup 4 Lab 5Melaku DinkuNo ratings yet
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDocument6 pagesReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderNo ratings yet
- PracticalDocument10 pagesPracticalSec ArcNo ratings yet
- Experiment No. 02 Name of The Experiment: Modeling of Physical Systems and Study of Their Closed Loop Response ObjectiveDocument6 pagesExperiment No. 02 Name of The Experiment: Modeling of Physical Systems and Study of Their Closed Loop Response ObjectiveMd SayemNo ratings yet
- Paper 2 PDFDocument4 pagesPaper 2 PDFJose MedinaNo ratings yet
- Tuning of A PID Controller Using Ziegler-Nichols MethodDocument7 pagesTuning of A PID Controller Using Ziegler-Nichols MethodTomKish100% (1)
- Lab Report 3: Labs 6 & 7 MEM459/MEM540-Control Applications of DSPDocument25 pagesLab Report 3: Labs 6 & 7 MEM459/MEM540-Control Applications of DSPBryan Badillo RamosNo ratings yet
- Lab 7-CSDocument8 pagesLab 7-CSkashafNo ratings yet
- InTech-Pid Control TheoryDocument17 pagesInTech-Pid Control TheoryAbner BezerraNo ratings yet
- PID Controlled Synchronous Motor For Power Factor CorrectionDocument5 pagesPID Controlled Synchronous Motor For Power Factor CorrectionigoreliasNo ratings yet
- IMC Tuned PID Controller Improves DC Motor ControlDocument6 pagesIMC Tuned PID Controller Improves DC Motor ControljayaseelanNo ratings yet
- PID Controller DesignDocument14 pagesPID Controller DesignWashington Luiz Leite SousaNo ratings yet
- Internal Model Control (Imc) and Imc Based Pid ControllerDocument52 pagesInternal Model Control (Imc) and Imc Based Pid ControllermanikandaprabhuNo ratings yet
- 54 PDFDocument4 pages54 PDFJay ParkheNo ratings yet
- Fuzzy PID Controller Improves Speed Control of DC Motor in LabVIEWDocument7 pagesFuzzy PID Controller Improves Speed Control of DC Motor in LabVIEWGunpla GandamuNo ratings yet
- Tuning PID controllers using SimulinkDocument9 pagesTuning PID controllers using SimulinkMuh. ILHAM. Hasby. HNo ratings yet
- Temperature Control Waterbath Control System Using PID ControllerDocument5 pagesTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufNo ratings yet
- Chapter 6 PIDDocument43 pagesChapter 6 PIDkibrom atsbhaNo ratings yet
- PID ControllerDocument44 pagesPID ControllerJasper SeeNo ratings yet
- Comparative Speed Control Study Using PID and Fuzzy Logic ControllerDocument4 pagesComparative Speed Control Study Using PID and Fuzzy Logic ControllerAhmed AlhadyNo ratings yet
- Tuning of PID Controllers Using SimulinkDocument9 pagesTuning of PID Controllers Using SimulinkVarun MishraNo ratings yet
- Lab 5 ReportDocument12 pagesLab 5 ReportMelaku DinkuNo ratings yet
- Paper 1Document7 pagesPaper 1Oscar Ruiz SerranoNo ratings yet
- Lab3 Group2 19000637Document14 pagesLab3 Group2 19000637You have been hackedNo ratings yet
- Real-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using LabviewDocument6 pagesReal-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using Labviewvikalp guptaNo ratings yet
- Design and Comparison of A Multi Purpose Pid Controller Using Classical and Zeigler Nichols Technique IJERTV6IS050361Document3 pagesDesign and Comparison of A Multi Purpose Pid Controller Using Classical and Zeigler Nichols Technique IJERTV6IS050361arslan arslanNo ratings yet
- DC-DC Power Converter With Digital PID ControllerDocument4 pagesDC-DC Power Converter With Digital PID ControllerAmritaSinghNo ratings yet
- DC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerDocument6 pagesDC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerFirman IlyasNo ratings yet
- Lab 09 PDFDocument8 pagesLab 09 PDFAbdul Rehman AfzalNo ratings yet
- Speed Control of Brushless DC Motor Using Fuzzy ControllerDocument9 pagesSpeed Control of Brushless DC Motor Using Fuzzy ControllerKusalava SarmaNo ratings yet
- Lecture2 3Document25 pagesLecture2 3vrushalibhattNo ratings yet
- Angular Position (FULL REPORT)Document19 pagesAngular Position (FULL REPORT)Farid AsyrafNo ratings yet
- LabVIEW Based PID Design Method For DC Motor PositionDocument4 pagesLabVIEW Based PID Design Method For DC Motor PositionViswanathanBalajiNo ratings yet
- Speed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationDocument5 pagesSpeed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationWahyunggoro ONo ratings yet
- Optimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesDocument6 pagesOptimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesAnonymous WkbmWCa8MNo ratings yet
- Iterative Learning Control ReportDocument20 pagesIterative Learning Control ReportHoàng HứaNo ratings yet
- PID Controller Design: Itce470: Control Sysytem Experiment No. 4Document5 pagesPID Controller Design: Itce470: Control Sysytem Experiment No. 4HALIMANo ratings yet
- Drive Unit 4 Closed Loop Control of DC DriveDocument22 pagesDrive Unit 4 Closed Loop Control of DC DriveswamNo ratings yet
- Speed Control of DC Motor Using Pid Controller Based On MatlabDocument8 pagesSpeed Control of DC Motor Using Pid Controller Based On MatlabAlexander DeckerNo ratings yet
- Tuning PID Controllers with Fuzzy Logic for Improved ControlDocument17 pagesTuning PID Controllers with Fuzzy Logic for Improved ControlJurgen CokuNo ratings yet
- PEEE801D Question Bank CA4Document3 pagesPEEE801D Question Bank CA4Bhudev SarkarNo ratings yet
- Tuning of PID Controllers Using Simulink: January 2009Document9 pagesTuning of PID Controllers Using Simulink: January 2009aymen gulzarNo ratings yet
- SICE-ICASE International Joint Conference 2006Document6 pagesSICE-ICASE International Joint Conference 2006ShamsMohdNo ratings yet
- An Optimum Setting of Controller For A DC-DC Converter Using Bacterial Intelligence TechniqueDocument7 pagesAn Optimum Setting of Controller For A DC-DC Converter Using Bacterial Intelligence TechniqueGlan DevadhasNo ratings yet
- Servo FundamentalsDocument11 pagesServo Fundamentalsapi-3797895No ratings yet
- PIDtutorialDocument13 pagesPIDtutorialalijnubyNo ratings yet
- Multivariable Predictive Control: Applications in IndustryFrom EverandMultivariable Predictive Control: Applications in IndustryNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Practical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11From EverandPractical Embedded Controllers: Design and Troubleshooting with the Motorola 68HC11No ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- 7 Principles of System EngineeringDocument9 pages7 Principles of System Engineeringlorindal100% (1)
- Automatic Control Exam SolutionsDocument6 pagesAutomatic Control Exam SolutionsAl-ShukaNo ratings yet
- Specialized Process ModelsDocument19 pagesSpecialized Process ModelsRhyngel100% (1)
- Icitst 2018Document2 pagesIcitst 2018himagirisaiNo ratings yet
- Problem Sheet On Discrete Time SystemDocument5 pagesProblem Sheet On Discrete Time SystemSourav PradhanNo ratings yet
- Winter - Semester - Course - Allocation - 201920 Allocated As On 01nov2019Document295 pagesWinter - Semester - Course - Allocation - 201920 Allocated As On 01nov2019Parishrut17No ratings yet
- TQM and Business Innovation: How Quality Management Supports ChangeDocument19 pagesTQM and Business Innovation: How Quality Management Supports ChangeAdhiMakayasaSaputraNo ratings yet
- Understanding Software Development ProcessesDocument15 pagesUnderstanding Software Development ProcessesNa GarenNo ratings yet
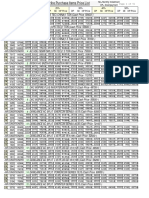
- PriceListHirePurchase NormalDocument51 pagesPriceListHirePurchase NormalMuhammad AtifNo ratings yet
- Use Case BasicUseCasesDocument16 pagesUse Case BasicUseCasessamiNo ratings yet
- Unit-1 DDBMS ArchitectureDocument14 pagesUnit-1 DDBMS ArchitectureKeshav SharmaNo ratings yet
- Control Systems1Document19 pagesControl Systems1Mohammad Gulam AhamadNo ratings yet
- Artificial Intelligence and ExamplesDocument1 pageArtificial Intelligence and ExamplesjeoNo ratings yet
- 02-15 QCS 2014Document17 pages02-15 QCS 2014Raja Ahmed HassanNo ratings yet
- Thermodynamics II Assignment 3: C R I H H I R H HDocument2 pagesThermodynamics II Assignment 3: C R I H H I R H HPriyanshuNo ratings yet
- Automation and Control LectureDocument4 pagesAutomation and Control LectureSamujawal Kumar SumanNo ratings yet
- Chapter 01 - An Overview of Organizational Behavior: Answer: TrueDocument26 pagesChapter 01 - An Overview of Organizational Behavior: Answer: TrueRey Joyce AbuelNo ratings yet
- Process Dynamics and Control (CHD 324) Assignment 3: K 100 0.2 s+1 20s K R(S) Y(s)Document2 pagesProcess Dynamics and Control (CHD 324) Assignment 3: K 100 0.2 s+1 20s K R(S) Y(s)Ashish KushwahaNo ratings yet
- Climaveneta OverviewDocument4 pagesClimaveneta OverviewNgo Nguyen Van TheNo ratings yet
- The Web of Life: A New Scientific FrameworkDocument7 pagesThe Web of Life: A New Scientific FrameworkInga MkhitaryanNo ratings yet
- Learning Ecosystems: Case Studies Exploring New Models of EducationDocument107 pagesLearning Ecosystems: Case Studies Exploring New Models of EducationJessica Besser-RosenbergNo ratings yet
- Mtab AristopdfDocument1 pageMtab Aristopdfalagar krishna kumar0% (1)
- (AP2) PFC Control AutoclaveDocument10 pages(AP2) PFC Control AutoclaveAleksander PreglejNo ratings yet
- Assignment Method Group 7 BAEDocument20 pagesAssignment Method Group 7 BAESharmaine Altezo CarranzaNo ratings yet
- Quality Management IntroDocument26 pagesQuality Management IntroSharizal Sanik100% (1)
- Fault Tree Analysis - FTADocument6 pagesFault Tree Analysis - FTAmark_vyzNo ratings yet
- Work Interactions DPP-02 (Of Lecture 04 & 05) Shreshth GATE 2025 Mechanical Weekday (Hinglish)Document3 pagesWork Interactions DPP-02 (Of Lecture 04 & 05) Shreshth GATE 2025 Mechanical Weekday (Hinglish)Vivek KumarNo ratings yet
- Chapter 2 Heat ConductionDocument26 pagesChapter 2 Heat ConductionFarooq AhmadNo ratings yet
- E Actcld 23Document11 pagesE Actcld 23DIGITAL TELUGUNo ratings yet
- Thermodynamics PDFDocument104 pagesThermodynamics PDFasNo ratings yet