You might also like
- Lecture 6 (Flight Planning)Document40 pagesLecture 6 (Flight Planning)Bill Dominique BuljatinNo ratings yet
- Flight PlanningDocument32 pagesFlight PlanningPraveen Meena60% (5)
- DGS OF ULTRASONICS EvulationDocument28 pagesDGS OF ULTRASONICS Evulationlram70No ratings yet
- Aerial TriangulationDocument37 pagesAerial TriangulationRussel Clarete100% (1)
- Lectuers 6-8 (Compatibility Mode)Document34 pagesLectuers 6-8 (Compatibility Mode)minimailNo ratings yet
- OrthophotosDocument33 pagesOrthophotosSaurabh SumanNo ratings yet
- DarkMoonAppdix PDFDocument25 pagesDarkMoonAppdix PDFMarcelino MartínezNo ratings yet
- Did We Land On The Moon? (Appendix)Document25 pagesDid We Land On The Moon? (Appendix)Marcelino MartínezNo ratings yet
- Lecture 3: Cameras & Their Geometry: © 2019 Dr. Sarhat M AdamDocument27 pagesLecture 3: Cameras & Their Geometry: © 2019 Dr. Sarhat M AdamMohannad S ZebariNo ratings yet
- Aerialphotography 220920130348 1b827bf0Document88 pagesAerialphotography 220920130348 1b827bf0reta birhanuNo ratings yet
- Flight PlanningDocument32 pagesFlight PlanningJay Ann100% (1)
- Best Practices DroneDocument23 pagesBest Practices DroneRudimar PetterNo ratings yet
- Photogrammetry PDFDocument8 pagesPhotogrammetry PDFArham SheikhNo ratings yet
- Scale in ApDocument7 pagesScale in ApmadhuspatitripathyNo ratings yet
- Aerial SurveyingDocument43 pagesAerial SurveyingRishabh Singh100% (1)
- Chapter 7 Terrestrial Photogrammetry Chapter 8 Digital PhotogrammetryDocument33 pagesChapter 7 Terrestrial Photogrammetry Chapter 8 Digital PhotogrammetryKarungi AroneNo ratings yet
- Flight Planning For Aerial PhotographyDocument5 pagesFlight Planning For Aerial PhotographyMichael Mutale100% (1)
- Introduction On Photogrammetry by Koert SijmonsDocument124 pagesIntroduction On Photogrammetry by Koert SijmonsVishal MishraNo ratings yet
- Image Correction: Geometric Correction Sut 4 13 April 2021Document42 pagesImage Correction: Geometric Correction Sut 4 13 April 2021Fanelo FelicityNo ratings yet
- Measuring The Geometry of Propellers: Using A Pitch GaugeDocument4 pagesMeasuring The Geometry of Propellers: Using A Pitch Gaugekishor jagtapNo ratings yet
- RpictDocument8 pagesRpicted chambersNo ratings yet
- Idoc Pub - Manual-Maxsurf (121-144) Es enDocument24 pagesIdoc Pub - Manual-Maxsurf (121-144) Es enAllan MarkovicNo ratings yet
- A Review of Photogrammetric PrinciplesDocument72 pagesA Review of Photogrammetric PrinciplesAna NadhirahNo ratings yet
- Measurement of The Spatial Frequency Response SFRDocument10 pagesMeasurement of The Spatial Frequency Response SFRpabloNo ratings yet
- 3dsurvey Ground-Control-Setup v002Document3 pages3dsurvey Ground-Control-Setup v002Assuenio AlvesNo ratings yet
- Geoinformatics - Unit - 1Document48 pagesGeoinformatics - Unit - 1Rituraj RastogiNo ratings yet
- Chapter 6: Basic RenderingDocument70 pagesChapter 6: Basic RenderingHimesh GargNo ratings yet
- Improvement of Spatial Resolution With Staggered Arrays As Used in The Airborne Optical Sensor Ads40Document6 pagesImprovement of Spatial Resolution With Staggered Arrays As Used in The Airborne Optical Sensor Ads40Kobalt von KriegerischbergNo ratings yet
- Lecture 10Document90 pagesLecture 10Al NashibNo ratings yet
- SAA SpecificationsDocument23 pagesSAA SpecificationsJean PDNo ratings yet
- Lecture 04Document35 pagesLecture 04abdul basitNo ratings yet
- DIFFERENTTYPESOFWINGLETSANDTHEIRCORRESPONDINGVORTICESDocument23 pagesDIFFERENTTYPESOFWINGLETSANDTHEIRCORRESPONDINGVORTICESqwertyuiopNo ratings yet
- L4-4 Automated Survey DesignDocument39 pagesL4-4 Automated Survey DesignSuryadi WijayaNo ratings yet
- Irt Image ResolutionDocument49 pagesIrt Image ResolutionDinesh Gupta100% (1)
- Maximizing Depth Buffer Range and PrecisionDocument10 pagesMaximizing Depth Buffer Range and PrecisionJonathan JohnsonNo ratings yet
- Aerial PhotographyDocument56 pagesAerial PhotographyRajan TiwariNo ratings yet
- Pix4D White Paper - How Accurate Are UAV Surveying Methods PDFDocument8 pagesPix4D White Paper - How Accurate Are UAV Surveying Methods PDFpisterNo ratings yet
- Chapter 2-CDocument78 pagesChapter 2-CAxel RiveraNo ratings yet
- Bölüm5 1Document18 pagesBölüm5 1ramazanvank40No ratings yet
- Pix4D White Paper How Accurate Are UAV Surveying MethodsDocument8 pagesPix4D White Paper How Accurate Are UAV Surveying MethodsvocaltorrezNo ratings yet
- Waldo Tobler 1987Document5 pagesWaldo Tobler 1987jp8c64f9ggNo ratings yet
- ATPL Viva Questions........Document6 pagesATPL Viva Questions........Saurabh Gupta100% (3)
- Ils SnowDocument77 pagesIls Snowliu50310% (1)
- Photogrammetry (1) Lec 03Document44 pagesPhotogrammetry (1) Lec 03sebastion jensonNo ratings yet
- Assignment No. 5 - RCS and MTI: Radar and Remote SensingDocument2 pagesAssignment No. 5 - RCS and MTI: Radar and Remote SensingValerio LanieriNo ratings yet
- 5.RS - Lec.5 - UAV & DTMDocument15 pages5.RS - Lec.5 - UAV & DTMSarah ZNo ratings yet
- 3 Chapter 3 Part 1 Remote Sensing Systems PDFDocument60 pages3 Chapter 3 Part 1 Remote Sensing Systems PDFRojina ThapamagarNo ratings yet
- 5th Sem SEC3T Aerial Photograph (Types, Geometry and Principle) Goutam Kumar Das 08-02-2021Document26 pages5th Sem SEC3T Aerial Photograph (Types, Geometry and Principle) Goutam Kumar Das 08-02-2021Karthick. GNo ratings yet
- Pteryx Mapping SecretsDocument66 pagesPteryx Mapping SecretsYanuar RezaNo ratings yet
- RS2 LecturenoteDocument14 pagesRS2 LecturenoteBenjamin NutatiNo ratings yet
- NAV 5 - Prelim Quiz 2 (ABUCEJO, Antonie Peter Q.)Document3 pagesNAV 5 - Prelim Quiz 2 (ABUCEJO, Antonie Peter Q.)Antonie Peter AbucejoNo ratings yet
- Edge-Based Approach To Estimate The Drift of A Helicopter During FlightDocument12 pagesEdge-Based Approach To Estimate The Drift of A Helicopter During FlightTrickster bvekNo ratings yet
- Navitar Info Sheet Outline Drawing 1 24207Document2 pagesNavitar Info Sheet Outline Drawing 1 24207Kumar Rbk RbkNo ratings yet
- Photogrammetry 2Document48 pagesPhotogrammetry 2A RNo ratings yet
- Click To Edit Master Title StyleDocument29 pagesClick To Edit Master Title StylewulanluvspinkNo ratings yet
- 3DDisplay USCICT SIGGRAPH2007Document10 pages3DDisplay USCICT SIGGRAPH2007Kitanovic NenadNo ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
- Gene-Definition, Concept of Gene-Classical and Modern ConceptsDocument4 pagesGene-Definition, Concept of Gene-Classical and Modern ConceptsAarthi shreeNo ratings yet
- Properties of Mono SacchardiesDocument16 pagesProperties of Mono SacchardiesAarthi shreeNo ratings yet
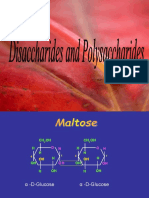
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- Structure of MonosacchardiesDocument7 pagesStructure of MonosacchardiesAarthi shreeNo ratings yet
- M. AARTHI SHREE 2020012001: Answer KeyDocument3 pagesM. AARTHI SHREE 2020012001: Answer KeyAarthi shreeNo ratings yet
- Overview of Central Dogma of LifeDocument4 pagesOverview of Central Dogma of LifeAarthi shreeNo ratings yet
- FLIR E60 (Incl. Wi-Fi) : Technical DataDocument1 pageFLIR E60 (Incl. Wi-Fi) : Technical DataYasmine SalehNo ratings yet
- In-Sight 9912 Vision System: Large Field of View Without Sacrificing ResolutionDocument5 pagesIn-Sight 9912 Vision System: Large Field of View Without Sacrificing ResolutionKushal KoiralaNo ratings yet
- Thermographic TestingDocument14 pagesThermographic TestingArluky NovandyNo ratings yet
- Magnity Intelligent Infrared Screening System For Fever Detection PDFDocument11 pagesMagnity Intelligent Infrared Screening System For Fever Detection PDFGustavo AHNo ratings yet
- DS-2CE16H0T-ITPFS 5 MP Audio CameraDocument4 pagesDS-2CE16H0T-ITPFS 5 MP Audio CameraChristian Rios GuevaraNo ratings yet
- Mitutoyo Objective CatalogDocument32 pagesMitutoyo Objective Catalogilanben2003No ratings yet
- DS 2XM6222G1 I (D) (M) ( - ND 20230222Document7 pagesDS 2XM6222G1 I (D) (M) ( - ND 20230222Nurrul AhmadNo ratings yet
- Datasheet Gocator 2000 Web enDocument2 pagesDatasheet Gocator 2000 Web enerNo ratings yet
- DS-2CD1047G2H-LIUF Datasheet 20230927Document5 pagesDS-2CD1047G2H-LIUF Datasheet 20230927tpepmtto01No ratings yet
- Prepar3D View GroupsDocument22 pagesPrepar3D View GroupsTrevorHaleNo ratings yet
- DS-2CD3T23G0-2'4ISM Datasheet V5.5.60 20180820Document4 pagesDS-2CD3T23G0-2'4ISM Datasheet V5.5.60 20180820l1f3b00kNo ratings yet
- ZKTeco-Quốc - Phone 0904848459Document10 pagesZKTeco-Quốc - Phone 0904848459Ks QuốcNo ratings yet
- Aerofly RC 7 Manual EnglishDocument46 pagesAerofly RC 7 Manual EnglishSergio ImotoNo ratings yet
- DS-2DE4425IW-DE (S6) 4 MP 25× Network IR Speed DomeDocument7 pagesDS-2DE4425IW-DE (S6) 4 MP 25× Network IR Speed DomeAsnake TegenawNo ratings yet
- OT02 Optics BasicsDocument35 pagesOT02 Optics Basicschars choirNo ratings yet
- ADS40Document24 pagesADS40André LapaNo ratings yet
- DS-2CE17H0T-IT5F (C) 5 MP CameraDocument3 pagesDS-2CE17H0T-IT5F (C) 5 MP Cameraايمن الهدامNo ratings yet
- Hexagon MI Aicon Scanning Solutions Brochure ENDocument24 pagesHexagon MI Aicon Scanning Solutions Brochure ENekopujiantoeNo ratings yet
- NightOwl ZM Datasheet enDocument2 pagesNightOwl ZM Datasheet ennabilNo ratings yet
- TTLM Develop Basic Integrated Security SystemDocument133 pagesTTLM Develop Basic Integrated Security Systemየመጨረሻዉ ሰዉ ነኝNo ratings yet
- DS-2CE12DF0T-LFS Datasheet 20231113Document5 pagesDS-2CE12DF0T-LFS Datasheet 20231113nkoyoyojohnpaul56No ratings yet
- Origins of CinemaDocument9 pagesOrigins of CinemaDejan SamardzicNo ratings yet
- 2MP Lens ChartsDocument16 pages2MP Lens Chartskürşad ersagunNo ratings yet
- Day 1-Video Training - Camera, Analytics, Matrix - 02-Feb-2014Document159 pagesDay 1-Video Training - Camera, Analytics, Matrix - 02-Feb-2014Arman Ul NasarNo ratings yet
- Trimble FX Controller User Guide PDFDocument147 pagesTrimble FX Controller User Guide PDFNinfa SuarezNo ratings yet
- CAM340plus BrochureDocument2 pagesCAM340plus BrochureauditcirclekhanewalNo ratings yet
- Omnivision Ovm6948Document2 pagesOmnivision Ovm6948johan janssensNo ratings yet
- Spec of Dome DS 2CD2121G0 IDocument4 pagesSpec of Dome DS 2CD2121G0 Ikakyo29433No ratings yet
- Flir t620 Datasheet PDFDocument2 pagesFlir t620 Datasheet PDFPuppy Ayu JatmikoNo ratings yet
- CT Image QualityDocument25 pagesCT Image QualityRa'eel Khan100% (2)