You might also like
- View-Dependent Polyhedral 3D DisplayDocument5 pagesView-Dependent Polyhedral 3D DisplaymaiakidNo ratings yet
- Output Devices:: Graphics Displays, Sound Displays & Haptic FeedbackDocument37 pagesOutput Devices:: Graphics Displays, Sound Displays & Haptic FeedbackSravan KumarNo ratings yet
- Virtual Presence PresentationDocument11 pagesVirtual Presence Presentationmini369No ratings yet
- AVIE: A Versatile Multi-User Stereo 360°°°° Interactive VR TheatreDocument5 pagesAVIE: A Versatile Multi-User Stereo 360°°°° Interactive VR Theatrediogo.chagas02No ratings yet
- Virtual Retinal Display Technology 1998Document6 pagesVirtual Retinal Display Technology 1998pradi66554433No ratings yet
- 2011 Encumbrance-Free Telepresence System With Real-Time 3D Capture and Display Using Commodity Depth Cameras PDFDocument10 pages2011 Encumbrance-Free Telepresence System With Real-Time 3D Capture and Display Using Commodity Depth Cameras PDFSaNo ratings yet
- 3d TV Technology NewDocument21 pages3d TV Technology Newvivek gangwar0% (1)
- Emerging Technics in TelevisionDocument11 pagesEmerging Technics in TelevisionDinesh VijayNo ratings yet
- Wide-View Visual Systems For Flight Simulation: Dubravko MiljkovićDocument6 pagesWide-View Visual Systems For Flight Simulation: Dubravko MiljkovićtranxuanminhNo ratings yet
- Photonics 08 00381Document11 pagesPhotonics 08 00381Pablo RoeschNo ratings yet
- Hitesh Report FinalDocument25 pagesHitesh Report FinalHitesh ShelkeNo ratings yet
- Immersive Light Field Video With A LayeredMeshRepresentationDocument15 pagesImmersive Light Field Video With A LayeredMeshRepresentationOoon NattaonNo ratings yet
- Representation, Coding and Interactive Rendering of High-Resolution Panoramic Images and Video Using MPEG-4Document6 pagesRepresentation, Coding and Interactive Rendering of High-Resolution Panoramic Images and Video Using MPEG-4amin mohNo ratings yet
- DSX510 510 PDFDocument28 pagesDSX510 510 PDFRepresentaciones y Distribuciones FALNo ratings yet
- IGLANCE Interactive Free Viewpoint For 3Document4 pagesIGLANCE Interactive Free Viewpoint For 3Pedro David Vasquez NietoNo ratings yet
- MEMS - A New Electronic Device That Combines Both Electronic and No-Electronic DevicesDocument4 pagesMEMS - A New Electronic Device That Combines Both Electronic and No-Electronic DevicesSoha SalamaNo ratings yet
- Practical SVBRDF Capture in The Frequency DomainDocument12 pagesPractical SVBRDF Capture in The Frequency DomainZStepan11No ratings yet
- 3D Graphics RenderingDocument59 pages3D Graphics RenderingAnurag Tiwari100% (2)
- A GPU Sub-Pixel Algorithm For Autostereoscopic Virtual RealityDocument7 pagesA GPU Sub-Pixel Algorithm For Autostereoscopic Virtual RealityeGzoNo ratings yet
- VR Systems: An Overview of Virtual Reality Components and TechnologiesDocument105 pagesVR Systems: An Overview of Virtual Reality Components and TechnologiesG KalaiarasiNo ratings yet
- Off-Axis Layered Displays Hybrid Direct-View Near-Eye Mixed Reality With Focus CuesDocument10 pagesOff-Axis Layered Displays Hybrid Direct-View Near-Eye Mixed Reality With Focus Cuespradi66554433No ratings yet
- Overview and Applications: Yasir O. Sinada Olivier SteigerDocument14 pagesOverview and Applications: Yasir O. Sinada Olivier Steigersid100% (1)
- 3D Graphics Rendering: Technology and Historical OverviewDocument55 pages3D Graphics Rendering: Technology and Historical OverviewKathirrvelu SubramanianNo ratings yet
- Design of Hologram App Using Real Time 3-D Live Video StreamingDocument5 pagesDesign of Hologram App Using Real Time 3-D Live Video StreamingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 32 Digital Image Processing - 1Document17 pages32 Digital Image Processing - 1Sirisha KhaspaNo ratings yet
- Tele-Graffiti: By: Nagendra K. (4BW07EC410)Document26 pagesTele-Graffiti: By: Nagendra K. (4BW07EC410)nagendra_ec105393100% (1)
- Accelerate Light Field Rendering with 3D Kernel Foveated RenderingDocument11 pagesAccelerate Light Field Rendering with 3D Kernel Foveated RenderingManthiramurthy ParamasivamNo ratings yet
- Holographic DisplaysDocument8 pagesHolographic DisplaysavtarNo ratings yet
- 2019.09 - 이동호 - Efficient Edge-Based Image Interpolation Method Using Neighboring Slope InformationDocument10 pages2019.09 - 이동호 - Efficient Edge-Based Image Interpolation Method Using Neighboring Slope Informationanshupriya380No ratings yet
- 2018 StefaniDocument8 pages2018 StefaniPablo Acuña EscultorNo ratings yet
- Chapter 5 - 3D Video Display TechnologiesDocument9 pagesChapter 5 - 3D Video Display TechnologiesKC EIRLNo ratings yet
- Sensors On 3d DigitizationDocument24 pagesSensors On 3d DigitizationprincegirishNo ratings yet
- Mr. M. Sakthimohanassistant Professor / Ece / Seet Kalasalingam Academy of Research and EducationDocument42 pagesMr. M. Sakthimohanassistant Professor / Ece / Seet Kalasalingam Academy of Research and Education1627sakthiNo ratings yet
- PanoWS Dresden2004 ChapmanDocument8 pagesPanoWS Dresden2004 Chapmanchandrasekhar71No ratings yet
- Aggarwal Panoramic Stereo Videos CVPR 2016 PaperDocument9 pagesAggarwal Panoramic Stereo Videos CVPR 2016 PaperTestNo ratings yet
- Esentation By: Mahesh Kumar Shrestha Mahesh Singh Madai Manisha DesharDocument42 pagesEsentation By: Mahesh Kumar Shrestha Mahesh Singh Madai Manisha Deshar1627sakthiNo ratings yet
- Son 2017Document16 pagesSon 2017Rahul MNo ratings yet
- Adhiparasakthi College of Engineering G.B. Nagar, Kalavai - 632 506 Department of Computer Science & Engg Iv Year / Cse Cs2401 - Computer GraphicsDocument13 pagesAdhiparasakthi College of Engineering G.B. Nagar, Kalavai - 632 506 Department of Computer Science & Engg Iv Year / Cse Cs2401 - Computer GraphicsBritto RajNo ratings yet
- Rotoscoping Appearance ModelsDocument9 pagesRotoscoping Appearance ModelsNeerajNo ratings yet
- Lecture Outline: Output DevicesDocument41 pagesLecture Outline: Output DevicesVijay KumarNo ratings yet
- Virtual Retinal Display: by Harish.S 1DS07CS403Document26 pagesVirtual Retinal Display: by Harish.S 1DS07CS403Harish SrinivasanNo ratings yet
- Graphics Pipeline and GraphsDocument12 pagesGraphics Pipeline and GraphsRohit TiwariNo ratings yet
- Making One Object Look Like Another Controlling Appearance Using A Projector-Camera SystemDocument8 pagesMaking One Object Look Like Another Controlling Appearance Using A Projector-Camera SystemXitocranNo ratings yet
- 3D Digitization Sensors GuideDocument22 pages3D Digitization Sensors GuideFaiz Karobari ShahDewanNo ratings yet
- cs405 02 RenderingPipeline NEWDocument24 pagescs405 02 RenderingPipeline NEWCeren HaydarogluNo ratings yet
- Kevin Margo Robert Nederhorst: CG Supervisor, Blur Studio VFX Supervisor, Svengali FXDocument4 pagesKevin Margo Robert Nederhorst: CG Supervisor, Blur Studio VFX Supervisor, Svengali FXGenie MecaNo ratings yet
- Fast Bilateral-Space Stereo For Synthetic DefocusDocument9 pagesFast Bilateral-Space Stereo For Synthetic Defocusyuheng weiNo ratings yet
- Siear Waizy Alex Roman: Taylor James Creative Studio CG ArtistDocument4 pagesSiear Waizy Alex Roman: Taylor James Creative Studio CG Artistreloaded63No ratings yet
- Computer Graphics: Lecture 10 - Computer Animation and Viewing TransformationDocument43 pagesComputer Graphics: Lecture 10 - Computer Animation and Viewing TransformationMarium FayyazNo ratings yet
- 3D Graphics RenderingDocument55 pages3D Graphics RenderingFaris AriyantoNo ratings yet
- Nerf2Real: Sim2Real Transfer of Vision-Guided Bipedal Motion Skills Using Neural Radiance FieldsDocument12 pagesNerf2Real: Sim2Real Transfer of Vision-Guided Bipedal Motion Skills Using Neural Radiance Fields武怡No ratings yet
- 3D TelevisionDocument31 pages3D Televisionscribdrajaufo100% (1)
- 3D Displays: A Guide to Stereoscopic, Autostereoscopic and Holographic Display TechnologiesDocument25 pages3D Displays: A Guide to Stereoscopic, Autostereoscopic and Holographic Display TechnologiesRene RichardsNo ratings yet
- Currency Converter SoftwareDocument8 pagesCurrency Converter SoftwareAbel DemelashNo ratings yet
- Carolina Cruz-Neira - Surround-Screen Projection-Based Virtual Reality, The Design and Implementation of The CAVE (1993)Document8 pagesCarolina Cruz-Neira - Surround-Screen Projection-Based Virtual Reality, The Design and Implementation of The CAVE (1993)Cristian SintildeNo ratings yet
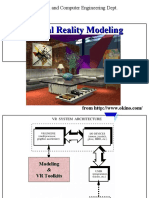
- Virtual Reality ModelingDocument163 pagesVirtual Reality ModelingHari DeivasigamaniNo ratings yet
- The 3D Holographic Projection Technology Based On Three-Dimensional Computer GraphicsDocument4 pagesThe 3D Holographic Projection Technology Based On Three-Dimensional Computer GraphicsAnurag KushwahaNo ratings yet
- Complete rendering solution with V-Ray 2.0 for 3ds MaxDocument2 pagesComplete rendering solution with V-Ray 2.0 for 3ds MaxandihernanNo ratings yet
- No21 System INVISIO Vertical FacadesDocument24 pagesNo21 System INVISIO Vertical FacadesKitanovic NenadNo ratings yet
- PCIe NVMe SSD Install Boot GuideDocument15 pagesPCIe NVMe SSD Install Boot GuideKitanovic NenadNo ratings yet
- What Are PCIe SSDs and How To Use Them As A Boot Drive For A Dell PCDocument5 pagesWhat Are PCIe SSDs and How To Use Them As A Boot Drive For A Dell PCKitanovic NenadNo ratings yet
- Gov Us Courts Casd 660353 5 0Document1 pageGov Us Courts Casd 660353 5 0Kitanovic NenadNo ratings yet
- Structural Design Data FTV StandardDocument11 pagesStructural Design Data FTV StandardKitanovic NenadNo ratings yet
- Pygame DocsDocument88 pagesPygame DocsAngel Custodio Calderon Paredes100% (1)
- Gov Uscourts Casd 660353 4 0Document3 pagesGov Uscourts Casd 660353 4 0Kitanovic NenadNo ratings yet
- No35-Inclined Roof SystemDocument24 pagesNo35-Inclined Roof SystemKitanovic NenadNo ratings yet
- Facility Guide 2006 (2.6)Document6 pagesFacility Guide 2006 (2.6)Kitanovic NenadNo ratings yet
- Structural Design Data FTV INVISIODocument16 pagesStructural Design Data FTV INVISIOKitanovic NenadNo ratings yet
- Facility Guide 2006 (2.5)Document2 pagesFacility Guide 2006 (2.5)Kitanovic NenadNo ratings yet
- Robot Getting Started Guide Eng 2011 Metric 2Document188 pagesRobot Getting Started Guide Eng 2011 Metric 2Dan Suciu100% (4)
- Facility Guide 2006 (2.4)Document4 pagesFacility Guide 2006 (2.4)Kitanovic NenadNo ratings yet
- Stanovi Sa Karakteristikama KucaDocument15 pagesStanovi Sa Karakteristikama KucaKitanovic NenadNo ratings yet
- Fast Curvature Matrix-Vector Products for Second-Order Gradient DescentDocument16 pagesFast Curvature Matrix-Vector Products for Second-Order Gradient DescentKitanovic NenadNo ratings yet
- Upustvo Za Ruter Rt-N14uDocument74 pagesUpustvo Za Ruter Rt-N14uKitanovic NenadNo ratings yet
- Facility Guide 2006 (2.3)Document7 pagesFacility Guide 2006 (2.3)Kitanovic NenadNo ratings yet
- Eurocode Handbook Explains Structural Design StandardsDocument155 pagesEurocode Handbook Explains Structural Design StandardscristinelbNo ratings yet
- Abalone Upustvo PDFDocument4 pagesAbalone Upustvo PDFKitanovic NenadNo ratings yet
- Abalone Upustvo PDFDocument4 pagesAbalone Upustvo PDFKitanovic NenadNo ratings yet
- Metodology CitiesDocument12 pagesMetodology CitiesKitanovic NenadNo ratings yet
- Bookkeeping ProcuduresDocument2 pagesBookkeeping ProcuduresKitanovic NenadNo ratings yet
- Tower 7 Uputstvo SRBDocument1,041 pagesTower 7 Uputstvo SRBcipsicc100% (4)
- Prezentacija Firme STATICUSDocument74 pagesPrezentacija Firme STATICUSKitanovic NenadNo ratings yet
- Secret Decoder: RstuvDocument1 pageSecret Decoder: RstuvXavier MartinezNo ratings yet
- Window FamilyDocument17 pagesWindow Familybabyvip123No ratings yet
- Bimstore Bible v12Document45 pagesBimstore Bible v12Dan StroescuNo ratings yet
- NETWORK HACKING - Computer Secur - Arunprasath MDocument39 pagesNETWORK HACKING - Computer Secur - Arunprasath MvidusandaNo ratings yet
- Secret Decoder: RstuvDocument1 pageSecret Decoder: RstuvXavier MartinezNo ratings yet
- NIA045462022 KL 13 AR 1130 Royal Enfield Motors LTD Classic X 350 ESDocument10 pagesNIA045462022 KL 13 AR 1130 Royal Enfield Motors LTD Classic X 350 ESAkhil DasNo ratings yet
- D.K.Pandey: Lecture 1: Growth and Decay of Current in RL CircuitDocument5 pagesD.K.Pandey: Lecture 1: Growth and Decay of Current in RL CircuitBBA UniversityNo ratings yet
- Ceramic Inlays A Case Presentation and LessonsDocument11 pagesCeramic Inlays A Case Presentation and LessonsStef David100% (1)
- Bitumen Water ProofingDocument23 pagesBitumen Water ProofingAkshthagowda848_1952No ratings yet
- 12.3 Operation Qualification Protocol For Laminar Air Flow UnitDocument4 pages12.3 Operation Qualification Protocol For Laminar Air Flow UnituzairNo ratings yet
- Reactions of Substituted Benzenes: 6 Edition Paula Yurkanis BruiceDocument72 pagesReactions of Substituted Benzenes: 6 Edition Paula Yurkanis BruiceyulliarperezNo ratings yet
- Different Project Topics of BSNLDocument3 pagesDifferent Project Topics of BSNLAbhijit Tripathy0% (1)
- Script For TourguidingDocument2 pagesScript For Tourguidingfshe2677% (125)
- Referencia 8Document130 pagesReferencia 8Kimiko SullonNo ratings yet
- TSC-2015-TAS Dec 10 PDFDocument8 pagesTSC-2015-TAS Dec 10 PDFvempadareddyNo ratings yet
- Ase Utra Military and Law Enforcement ProductsDocument12 pagesAse Utra Military and Law Enforcement ProductsjamesfletcherNo ratings yet
- Accounting For AC Winding Losses in The Electric Machine Design ProcessDocument4 pagesAccounting For AC Winding Losses in The Electric Machine Design Processjianfeng wangNo ratings yet
- A Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingDocument22 pagesA Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingFleetNo ratings yet
- Updated Guiding Overhaul Intervals for MAN B&W EnginesDocument13 pagesUpdated Guiding Overhaul Intervals for MAN B&W EnginesFernando César CarboneNo ratings yet
- Physical Education Week 1 ActivitiesDocument4 pagesPhysical Education Week 1 ActivitiesTummys TummieNo ratings yet
- CS401 Mcqs For Final TermDocument20 pagesCS401 Mcqs For Final Termsara.arshad.ch4No ratings yet
- The Process, Church of The Final Judgment - ScripturesDocument132 pagesThe Process, Church of The Final Judgment - Scripturescirclesphere100% (2)
- Providence Anadime Chorus Adc3Document1 pageProvidence Anadime Chorus Adc3wplaisNo ratings yet
- 3 Uscg BWM VRPDocument30 pages3 Uscg BWM VRPdivinusdivinusNo ratings yet
- Less Than 60 MilesDocument36 pagesLess Than 60 MilesDavid MckinleyNo ratings yet
- Interview Questions - Godrej Technical & HR Interview QuestionsDocument9 pagesInterview Questions - Godrej Technical & HR Interview Questionssasithar jaisankaranNo ratings yet
- Remote Sensing Mineral Exploration LithiumDocument16 pagesRemote Sensing Mineral Exploration LithiumGerald Darshan MogiNo ratings yet
- Troubleshooting Directory for LHB Type RMPU EOG AC CoachesDocument44 pagesTroubleshooting Directory for LHB Type RMPU EOG AC Coachesdivisional electrical engg100% (6)
- New American Paintings - December-January, 2019Document180 pagesNew American Paintings - December-January, 2019Fabio Nagual100% (1)
- Fiat Type 199 Punto Evo 3 PDFDocument9 pagesFiat Type 199 Punto Evo 3 PDFGestione SportivaNo ratings yet
- Sui Gas Connection FormsDocument1 pageSui Gas Connection Formsare50% (2)
- Carte Blanche: The New James Bond Novel by Jeffery DeaverDocument12 pagesCarte Blanche: The New James Bond Novel by Jeffery DeaverSimon and Schuster0% (1)
- Audi SSP 822703 4 2 L v8 Fsi Engine VolkswagenDocument4 pagesAudi SSP 822703 4 2 L v8 Fsi Engine Volkswagenmiriam100% (34)
- Berry phase in the simple harmonic oscillatorDocument14 pagesBerry phase in the simple harmonic oscillatora2618765No ratings yet
- The Efficient Way To Prevent Water Carryover and Keep Your Indoor Air HealthierDocument1 pageThe Efficient Way To Prevent Water Carryover and Keep Your Indoor Air HealthierAzrinshah Abu BakarNo ratings yet