You might also like
- FSAE Suspension OptimizationDocument32 pagesFSAE Suspension Optimizationisaiahfreerksen100% (1)
- Tire and ModelisationDocument66 pagesTire and ModelisationChaker AmirNo ratings yet
- Table of Contents for Gear Train DocumentDocument39 pagesTable of Contents for Gear Train Documentasad qureshiNo ratings yet
- Influence Analysis of The Damper Parameters To The Vehicle Lateral Dynamic Performance - Łukasz KostrzewskiDocument42 pagesInfluence Analysis of The Damper Parameters To The Vehicle Lateral Dynamic Performance - Łukasz Kostrzewskibartlomiej.ploszynski.pwrrtNo ratings yet
- Aumech Rame 107Document22 pagesAumech Rame 107Venkat MacharlaNo ratings yet
- Vertical Dynamics and Suspension SystemsDocument69 pagesVertical Dynamics and Suspension SystemsSubramanian PMNo ratings yet
- Discrete-Time For Traction: RobustDocument7 pagesDiscrete-Time For Traction: RobustfenasikarimNo ratings yet
- ME 3011 Kinematics & Dynamics Capstone ReportDocument20 pagesME 3011 Kinematics & Dynamics Capstone ReportMuhammad Hussain Bilal100% (1)
- Comparing Performance of Semi-Trailer Steering SystemsDocument20 pagesComparing Performance of Semi-Trailer Steering SystemsKocic BalicevacNo ratings yet
- Random Vibration Analysis For The Chassis Frame of Hydraulic Truck Based On AnsysDocument4 pagesRandom Vibration Analysis For The Chassis Frame of Hydraulic Truck Based On Ansysbilal sarfrazNo ratings yet
- Kinematic and Dynamic Analysis of Independent Suspension SystemDocument9 pagesKinematic and Dynamic Analysis of Independent Suspension Systemsiddhartha180987100% (3)
- Autonomous Vehicle ControlDocument41 pagesAutonomous Vehicle ControlJames GillardNo ratings yet
- Vehicle Suspension System Varnhagen Creed KahawatteDocument29 pagesVehicle Suspension System Varnhagen Creed KahawatteRanjeetNo ratings yet
- Mousetrap Project Institution Affiliated Course Title Submission DateDocument18 pagesMousetrap Project Institution Affiliated Course Title Submission DatebrianNo ratings yet
- Introduction To Chassis DynamicsDocument16 pagesIntroduction To Chassis DynamicsRajaSekarsajjaNo ratings yet
- Effects of Compliance On Vehicle Handling Properties: Society Op Automotive Engineers, IncDocument10 pagesEffects of Compliance On Vehicle Handling Properties: Society Op Automotive Engineers, IncantoNo1No ratings yet
- Redesign Bristol Fighter Car SuspensionDocument25 pagesRedesign Bristol Fighter Car SuspensionHartmann Yosef0% (1)
- Kinematics and Compliance of Sports Utility VehicleDocument7 pagesKinematics and Compliance of Sports Utility VehicleInternational Research Journal in Engineering and Emerging Technology100% (1)
- Transient Steering PDFDocument52 pagesTransient Steering PDFmdhyderaliNo ratings yet
- Evaluation of COMSOL Multiphysics For Rotordynamical AnalysisDocument49 pagesEvaluation of COMSOL Multiphysics For Rotordynamical AnalysisPushkar PanditNo ratings yet
- Optimizing Planetary Gears PDFDocument7 pagesOptimizing Planetary Gears PDFyildyusuf100% (1)
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 pagesAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNo ratings yet
- Simulation of Rear Wishbone Suspension SystemDocument51 pagesSimulation of Rear Wishbone Suspension SystemAlper KutluyuvaNo ratings yet
- Vehicle Powertrain & DynamicsDocument18 pagesVehicle Powertrain & DynamicsSaad mubeenNo ratings yet
- Aniti Roll Bar 4Document20 pagesAniti Roll Bar 4abdurhman suleimanNo ratings yet
- Vehicle Dynamics: Submitted By: 18AU02 Submitted To: P.Ghilman HaiderDocument14 pagesVehicle Dynamics: Submitted By: 18AU02 Submitted To: P.Ghilman Haiderahmad razaNo ratings yet
- Technical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004Document15 pagesTechnical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004rike.spNo ratings yet
- Rolling BearingsDocument33 pagesRolling BearingsNamNo ratings yet
- L049062069 PDFDocument8 pagesL049062069 PDFSandra MarkivNo ratings yet
- Components of The Suspension System Chapter 3Document30 pagesComponents of The Suspension System Chapter 3Imade EmadeNo ratings yet
- Design of A Parameter-Dependent Optimal Vibration Control of A Non-Linear Vehicle Suspension SystemDocument14 pagesDesign of A Parameter-Dependent Optimal Vibration Control of A Non-Linear Vehicle Suspension SystemAvik BanerjeeNo ratings yet
- Racecar Vehicle DynamicsDocument6 pagesRacecar Vehicle DynamicsMouad Ait bajbajNo ratings yet
- P 00500Document13 pagesP 00500khiladi2No ratings yet
- Design of A Two-Stage Cycloidal Gear Reducer WithDocument14 pagesDesign of A Two-Stage Cycloidal Gear Reducer WithAlejandro ChavezNo ratings yet
- Wheel Balancing MachineDocument26 pagesWheel Balancing MachinePatrick Marc Brunelle100% (2)
- Weiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangDocument6 pagesWeiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangMohd SolihinNo ratings yet
- Modern Vehicle Braking and Dynamics SimulationDocument35 pagesModern Vehicle Braking and Dynamics SimulationFaizrul YusoffNo ratings yet
- DEXTER Applications ManualDocument23 pagesDEXTER Applications ManualjasminbijedicNo ratings yet
- Modeling and Development of Antilock Braking System Project ReportDocument25 pagesModeling and Development of Antilock Braking System Project ReportSapna KumariNo ratings yet
- Mathematical Modelling and Simulation of Suspension System in MATLAB SIMULINKDocument37 pagesMathematical Modelling and Simulation of Suspension System in MATLAB SIMULINKIJRASETPublicationsNo ratings yet
- 2008-36-0219 - Balancer Shaft Development For A In-Line 4 Cylinder High Speed Diesel EngineDocument8 pages2008-36-0219 - Balancer Shaft Development For A In-Line 4 Cylinder High Speed Diesel Engineangelus256No ratings yet
- Mame2022 1 6Document6 pagesMame2022 1 6Pujo TrihantoroNo ratings yet
- The Research of Vehicle 'S Ride Comfort in The Nonlinear Suspension SystemDocument6 pagesThe Research of Vehicle 'S Ride Comfort in The Nonlinear Suspension SystemJulius RojoNo ratings yet
- Umi Umd 2817Document106 pagesUmi Umd 2817Le ThanhNo ratings yet
- Dynamics of Motorcycle Using Flexible Elements: Salvatore Massimo Oliveri, Michele Calì and Leonardo CatalanoDocument10 pagesDynamics of Motorcycle Using Flexible Elements: Salvatore Massimo Oliveri, Michele Calì and Leonardo CatalanoettypasewangNo ratings yet
- Influences of The Suspension Parameters On The Vehicle Suspension Performance For A Terrain VehicleDocument5 pagesInfluences of The Suspension Parameters On The Vehicle Suspension Performance For A Terrain VehicleAnonymous 4tBJMwwiNo ratings yet
- Car Suspension Over BumpDocument23 pagesCar Suspension Over BumpVairasivam Karisna KumarNo ratings yet
- Vehicle Steering Dynamic Calculation and SimulationDocument11 pagesVehicle Steering Dynamic Calculation and SimulationVaishnavi RoutNo ratings yet
- Parametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RDocument6 pagesParametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RInternational Journal of computational Engineering research (IJCER)No ratings yet
- 桥式起重机偏斜侧向力的研究Document78 pages桥式起重机偏斜侧向力的研究Jay ChanNo ratings yet
- Motorcycle Modeling and ControlDocument72 pagesMotorcycle Modeling and ControlkeeblerkhanNo ratings yet
- All Terrain VehicleDocument9 pagesAll Terrain VehicleAnirudh PanickerNo ratings yet
- Design and Optimization of Planetary Gears - DriveConcepts GMBHDocument12 pagesDesign and Optimization of Planetary Gears - DriveConcepts GMBHmayar mimiNo ratings yet
- Vivek Adap SuspDocument21 pagesVivek Adap SuspMohammed Asif NNo ratings yet
- Shimmy of Aircraft Main Landing Gears: I.J.M. BesselinkDocument201 pagesShimmy of Aircraft Main Landing Gears: I.J.M. BesselinkSharan RajNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Vehicle Handling Dynamics: Theory and ApplicationFrom EverandVehicle Handling Dynamics: Theory and ApplicationRating: 5 out of 5 stars5/5 (2)
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainFrom EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNo ratings yet
- Acer Aspire 4535 (Compal LA-4921P) PDFDocument57 pagesAcer Aspire 4535 (Compal LA-4921P) PDFMustafa AkanNo ratings yet
- (Jean Oliver and Alison Middleditch (Auth.) ) Funct (B-Ok - CC)Document332 pages(Jean Oliver and Alison Middleditch (Auth.) ) Funct (B-Ok - CC)Lorena BurdujocNo ratings yet
- Art for Ages 1-3 Focuses on DevelopmentDocument3 pagesArt for Ages 1-3 Focuses on DevelopmentPresley AbrauNo ratings yet
- My Demo DemoDocument19 pagesMy Demo DemoAlex LopezNo ratings yet
- Re15209 03-95Document8 pagesRe15209 03-95Kaushik GhoshNo ratings yet
- WMS INFINEON PROJECT TOWER (11Kv VCB INSTALLATION) - REV-1Document5 pagesWMS INFINEON PROJECT TOWER (11Kv VCB INSTALLATION) - REV-1tana100% (1)
- LP Science WeatheringDocument4 pagesLP Science WeatheringHazel L Ibarra100% (1)
- Architect Curriculum VitaeDocument4 pagesArchitect Curriculum VitaeMehboob AlamNo ratings yet
- 2020 Exam-Sample-Questions-Computer-ScienceDocument8 pages2020 Exam-Sample-Questions-Computer-ScienceNesrine LaradjiNo ratings yet
- Foundations On Expansive Soils: 3.1. BackgroundDocument31 pagesFoundations On Expansive Soils: 3.1. BackgroundbiniNo ratings yet
- Semiconductor Optical AmplifierDocument40 pagesSemiconductor Optical AmplifierVikas ThakurNo ratings yet
- Cell Organelles 11Document32 pagesCell Organelles 11Mamalumpong NnekaNo ratings yet
- String inverter comparisonDocument4 pagesString inverter comparisonRakesh HateyNo ratings yet
- ĐỀ THI HSGDocument13 pagesĐỀ THI HSGahmad amdaNo ratings yet
- Research 10 Mod2Document28 pagesResearch 10 Mod2Fernadez RodisonNo ratings yet
- Coaching, Mentoring & OnboardingDocument43 pagesCoaching, Mentoring & OnboardingosvehNo ratings yet
- Articulos 2022-2Document11 pagesArticulos 2022-2Nilser Enrique Valle HernandezNo ratings yet
- F2 IS Exam 1 (15-16)Document10 pagesF2 IS Exam 1 (15-16)羅天佑No ratings yet
- Pina301 Test1 Marking Memo 2023Document5 pagesPina301 Test1 Marking Memo 202322025966No ratings yet
- Actor analysis explores decision-making in environmental governanceDocument48 pagesActor analysis explores decision-making in environmental governancerizkyNo ratings yet
- ADWEA Approved Vendor List - 18.4.2013Document297 pagesADWEA Approved Vendor List - 18.4.2013Anonymous kjvaeVJNNo ratings yet
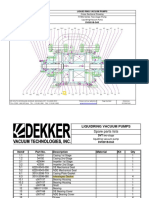
- Bomba de Vacio Part ListDocument2 pagesBomba de Vacio Part ListNayeli Zarate MNo ratings yet
- New Ss 8 OutlineDocument3 pagesNew Ss 8 Outlineapi-251874206No ratings yet
- Standard JKR Spec For Bridge LoadingDocument5 pagesStandard JKR Spec For Bridge LoadingHong Rui ChongNo ratings yet
- Mazda 6 2014 - Automatic Transaxle Workshop Manual FW6A-EL PDFDocument405 pagesMazda 6 2014 - Automatic Transaxle Workshop Manual FW6A-EL PDFFelipe CalleNo ratings yet
- 6.1.2 The Solar SystemDocument4 pages6.1.2 The Solar System205 NursyazliyanaNo ratings yet
- Four Pillars of EducationDocument42 pagesFour Pillars of EducationWinter BacalsoNo ratings yet
- Mobile Assisted Language Learning (MALL) Describes An Approach To Language LearningDocument7 pagesMobile Assisted Language Learning (MALL) Describes An Approach To Language Learninggusria ningsihNo ratings yet
- Integrated Marketing Communication PlanDocument5 pagesIntegrated Marketing Communication Planprojectwork185No ratings yet