You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Viper22a PDFDocument20 pagesViper22a PDFMosqueda Notarion Phil JamesNo ratings yet
- UC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllerDocument15 pagesUC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM Controllernita_alecsandruNo ratings yet
- NB676 DatasheetDocument19 pagesNB676 DatasheetRudy BudimanNo ratings yet
- Viper 12ADocument21 pagesViper 12Aahmed hussainNo ratings yet
- Ultra-Low On-Resistance and Compact Bidirectional Battery SwitchDocument8 pagesUltra-Low On-Resistance and Compact Bidirectional Battery SwitchrosaNo ratings yet
- SIP41109 VishaySiliconixDocument7 pagesSIP41109 VishaySiliconixEric Lenin Marin MoncadaNo ratings yet
- 5V/12V Synchronous-Rectified Buck Controller With Reference InputDocument19 pages5V/12V Synchronous-Rectified Buck Controller With Reference InputIgor LabutinNo ratings yet
- TC4420 TC4429 6A High-Speed Mosfet Drivers: Features General DescriptionDocument2 pagesTC4420 TC4429 6A High-Speed Mosfet Drivers: Features General DescriptionKSNo ratings yet
- SLA7024MDocument12 pagesSLA7024MEddy SulbaranNo ratings yet
- Green-Mode PWM Controller With High Voltage Startup Circuit: Preliminary GR8875 SeriesDocument14 pagesGreen-Mode PWM Controller With High Voltage Startup Circuit: Preliminary GR8875 SeriesaliNo ratings yet
- Synchronous Buck PWM DC-DC Controller: Fitipower Integrated Technology LNCDocument14 pagesSynchronous Buck PWM DC-DC Controller: Fitipower Integrated Technology LNCEchefisEchefisNo ratings yet
- Synchronous Buck PWM DC-DC Controller: Fitipower Integrated Technology LNCDocument14 pagesSynchronous Buck PWM DC-DC Controller: Fitipower Integrated Technology LNCJob LinuxNo ratings yet
- Schneider Electric Altivar 21 Quick StartDocument4 pagesSchneider Electric Altivar 21 Quick StartMahdi HadadzadehNo ratings yet
- Tps 54140Document52 pagesTps 54140niceautomation8831No ratings yet
- Datasheet PDFDocument15 pagesDatasheet PDFDhiran NishantNo ratings yet
- 3A Bus Termination Regulator: Features DescriptionDocument14 pages3A Bus Termination Regulator: Features DescriptionZak zsNo ratings yet
- LT 8364Document32 pagesLT 8364gtcv805No ratings yet
- Sensorless BLDC Controller A4960: Description Features and BenefitsDocument34 pagesSensorless BLDC Controller A4960: Description Features and BenefitsadilNo ratings yet
- Onsemi FSCQ0765RTYDTU DatasheetDocument33 pagesOnsemi FSCQ0765RTYDTU DatasheetsamynnxpNo ratings yet
- Off-Line Current Mode PWM Control Circuit With Undervoltage LockoutDocument7 pagesOff-Line Current Mode PWM Control Circuit With Undervoltage LockoutSero StivNo ratings yet
- lnk302 - 304 306 179954 PDFDocument19 pageslnk302 - 304 306 179954 PDFBimMarius0% (1)
- Lm46000 Simple Switcher 3.5 V To 60 V 0.5 A Synchronous Step-Down Voltage ConverterDocument52 pagesLm46000 Simple Switcher 3.5 V To 60 V 0.5 A Synchronous Step-Down Voltage ConverterJoseph BernardNo ratings yet
- TPS54620 4.5-V To 17-V Input, 6-A, Synchronous, Step-Down SWIFT™ ConverterDocument47 pagesTPS54620 4.5-V To 17-V Input, 6-A, Synchronous, Step-Down SWIFT™ ConverterShakti SinghNo ratings yet
- Lm43600 Simple Switcher 3.5 V To 36 V 0.5 A Synchronous Step-Down Voltage ConverterDocument53 pagesLm43600 Simple Switcher 3.5 V To 36 V 0.5 A Synchronous Step-Down Voltage ConverterJoseph BernardNo ratings yet
- UC3842B, UC3843B, UC2842B, UC2843B High Performance Current Mode ControllersDocument22 pagesUC3842B, UC3843B, UC2842B, UC2843B High Performance Current Mode ControllersAnilVarmaNo ratings yet
- Linkswitch-Lp Family DatasheetDocument18 pagesLinkswitch-Lp Family Datasheetdeepak_singla227No ratings yet
- Max5090A/B/C 2A, 76V, High-Efficiency Maxpower Step-Down DC-DC ConvertersDocument17 pagesMax5090A/B/C 2A, 76V, High-Efficiency Maxpower Step-Down DC-DC ConvertersDuc VoquangNo ratings yet
- FAN7380 Half-Bridge Gate Driver: Features DescriptionDocument12 pagesFAN7380 Half-Bridge Gate Driver: Features Descriptionflo72afNo ratings yet
- A4960 A Automotive DatasheetDocument34 pagesA4960 A Automotive DatasheetCanerNo ratings yet
- Uc2842b-45b Uc3842b-45b STDocument15 pagesUc2842b-45b Uc3842b-45b STAлександр ФедорчукNo ratings yet
- And Automotive 3-Phase BLDC Controller and MOSFET Driver: Description Features and BenefitsDocument21 pagesAnd Automotive 3-Phase BLDC Controller and MOSFET Driver: Description Features and BenefitsCanerNo ratings yet
- Ba6a Tips and TrixDocument10 pagesBa6a Tips and TrixDerick FernandesNo ratings yet
- 4.5V To 23V Input, 3-A Synchronous Step-Down SWIFT™ Converter With Eco-Mode™Document21 pages4.5V To 23V Input, 3-A Synchronous Step-Down SWIFT™ Converter With Eco-Mode™Egor FedorenkoNo ratings yet
- 4.5V To 23V Input, 3-A Synchronous Step-Down SWIFT™ Converter With Eco-Mode™Document23 pages4.5V To 23V Input, 3-A Synchronous Step-Down SWIFT™ Converter With Eco-Mode™temarioNo ratings yet
- Data SheetDocument16 pagesData SheetAnangNo ratings yet
- STPA003: 4 X 52 W Quad Bridge Power Amplifier With High Side Driver and Low Voltage OperationDocument25 pagesSTPA003: 4 X 52 W Quad Bridge Power Amplifier With High Side Driver and Low Voltage OperationBrian morenoNo ratings yet
- Using The TPS43061 Boost Evaluation Module (EVM) : User's GuideDocument20 pagesUsing The TPS43061 Boost Evaluation Module (EVM) : User's GuidePaulo chagas paulo ratoNo ratings yet
- AVR ComparisionDocument7 pagesAVR ComparisionGrupos GeradoresNo ratings yet
- Ads1000 User Manual Atten 1 0Document17 pagesAds1000 User Manual Atten 1 0Fidel E Ticse100% (1)
- Fairchild - Semiconductor FAN73611MX DatasheetDocument14 pagesFairchild - Semiconductor FAN73611MX DatasheetDeddy WilopoNo ratings yet
- Power Amplifier: Toa 900 Series IiDocument12 pagesPower Amplifier: Toa 900 Series IiRamiro Gonzalez MNo ratings yet
- 2059771linksw ln306gnDocument18 pages2059771linksw ln306gnRegulo GomezNo ratings yet
- Sluu284b 125035Document20 pagesSluu284b 125035gulhshan khanNo ratings yet
- Ap 3843 CPDocument13 pagesAp 3843 CPJesus ChaileNo ratings yet
- PS Technical Specifications 2014Document11 pagesPS Technical Specifications 2014Nihat KahvecioNo ratings yet
- MV Trafo SB SMC STP Ti en 11 SmaDocument7 pagesMV Trafo SB SMC STP Ti en 11 SmasaneleNo ratings yet
- GS EVB LLC 3KW GS Technical Manual 202105Document20 pagesGS EVB LLC 3KW GS Technical Manual 202105die6o_brNo ratings yet
- Gate Driver L6385EDocument16 pagesGate Driver L6385EĆazim SinanagićNo ratings yet
- S-816 Series: External Transistor Type Cmos Voltage RegulatorDocument24 pagesS-816 Series: External Transistor Type Cmos Voltage RegulatorTuto JhakornNo ratings yet
- Linkcv Family DatasheetDocument18 pagesLinkcv Family DatasheetaisanasNo ratings yet
- NCP81253 5 V MOSFET Driver Compatible With Single-Phase IMVP8 ControllersDocument11 pagesNCP81253 5 V MOSFET Driver Compatible With Single-Phase IMVP8 ControllersTom TomNo ratings yet
- NCP81253 5 V MOSFET Driver Compatible With Single-Phase IMVP8 ControllersDocument10 pagesNCP81253 5 V MOSFET Driver Compatible With Single-Phase IMVP8 ControllersBlue StacksNo ratings yet
- L 6386 eDocument19 pagesL 6386 ePedro IsmaelNo ratings yet
- DRV8306Document46 pagesDRV8306Lu HoaNo ratings yet
- DatasheetDocument20 pagesDatasheetمحمد محمدNo ratings yet
- Chloride Chloride Chloride Chloride Chloride: IndexDocument16 pagesChloride Chloride Chloride Chloride Chloride: IndexQuangNguyenNo ratings yet
- Nb679a MpsDocument19 pagesNb679a MpswarkeravipNo ratings yet
- STR-A6252M: Switching RegulatorsDocument13 pagesSTR-A6252M: Switching RegulatorsAntonioPeriniNo ratings yet
- Nee2102 Experiment Report 4Document7 pagesNee2102 Experiment Report 4Lynndon VillamorNo ratings yet
- Single Axis Solar Tracker Project ReportDocument26 pagesSingle Axis Solar Tracker Project ReportHemchandru MKNo ratings yet
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDocument21 pagesMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonNo ratings yet
- IOT Pet Feeder Using The Blynk Mobile App An ESP82Document25 pagesIOT Pet Feeder Using The Blynk Mobile App An ESP82manju989No ratings yet
- PLT424 Laboratory 1Document8 pagesPLT424 Laboratory 1Muhammad Anaz'sNo ratings yet
- Automated Sensor-Driven Parallel-Parking System (A.S.P.S.)Document16 pagesAutomated Sensor-Driven Parallel-Parking System (A.S.P.S.)Asha RanaNo ratings yet
- Design Develpment of A Software ToolDocument57 pagesDesign Develpment of A Software ToolMohaimenul IslamNo ratings yet
- 2-Days Gesture Controlled Robotics WorkshopDocument4 pages2-Days Gesture Controlled Robotics WorkshopSpice MobileNo ratings yet
- 3D Printed DIY Remote Controlled Tank With OperatiDocument98 pages3D Printed DIY Remote Controlled Tank With OperatitarijkNo ratings yet
- Hardware Engineers Guide To A Brushless-DC Motor Controller Design and ChallengesDocument6 pagesHardware Engineers Guide To A Brushless-DC Motor Controller Design and Challengesuzair aminNo ratings yet
- Application Note 36: Electroluminescent Displays - The BasicsDocument8 pagesApplication Note 36: Electroluminescent Displays - The BasicsKiss IstvánNo ratings yet
- Automatic Speed Control and Accident Avoidance of Vehicle UsingDocument34 pagesAutomatic Speed Control and Accident Avoidance of Vehicle UsingK HariNo ratings yet
- DRV 8833Document31 pagesDRV 8833Viktor VanoNo ratings yet
- Quasi Z SourceDocument9 pagesQuasi Z SourceMark-George RuthaNo ratings yet
- VNHD7008AY: H-Bridge Motor Driver For Automotive DC Motor DrivingDocument44 pagesVNHD7008AY: H-Bridge Motor Driver For Automotive DC Motor DrivingFırat Dede (Robotus)No ratings yet
- Ecm 0555 080 0703Document17 pagesEcm 0555 080 0703Anderson megusta el juegoNo ratings yet
- Obstacle Avoiding RobotDocument24 pagesObstacle Avoiding Robotmkafle101No ratings yet
- An-CM-302 SPWM Generator For Inverter DesignDocument18 pagesAn-CM-302 SPWM Generator For Inverter DesignRana ThakurNo ratings yet
- Selected (A1) Project of Automatic Temperature Control SystemDocument54 pagesSelected (A1) Project of Automatic Temperature Control SystemBelete GetachewNo ratings yet
- 4 Interfacing DC Motor With AVR Microcontroller Atmega16Document4 pages4 Interfacing DC Motor With AVR Microcontroller Atmega16AmiruddinNo ratings yet
- Automatic Coil Winding MachineDocument46 pagesAutomatic Coil Winding Machinetechnowave electronics100% (1)
- A3959 DatasheetDocument12 pagesA3959 DatasheetOctavio ParedesNo ratings yet
- In House Training Report: Sant Longowal Institute of Engineering and TechnologyDocument56 pagesIn House Training Report: Sant Longowal Institute of Engineering and Technologygaurav joshiNo ratings yet
- Automatic Car ParkingDocument38 pagesAutomatic Car ParkingBelete GetachewNo ratings yet
- Bluetooth Based 360 Degree Rotating MachineDocument69 pagesBluetooth Based 360 Degree Rotating Machinesakethdandu628No ratings yet
- Two-Stage Vs One-Stage Design For A Bidirectional 400V 12V 6kW Auxiliary Power Module in Electric VehiclesDocument5 pagesTwo-Stage Vs One-Stage Design For A Bidirectional 400V 12V 6kW Auxiliary Power Module in Electric VehiclesKostas GekasNo ratings yet
- C5. DC-AC Converter - UpdateDocument50 pagesC5. DC-AC Converter - UpdateHoàng TrươngNo ratings yet
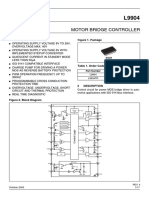
- Motor Bridge Controller: 1 Features Figure 1. PackageDocument17 pagesMotor Bridge Controller: 1 Features Figure 1. PackageNoelNo ratings yet
- Voice Wheel Chair Gps GPCDocument65 pagesVoice Wheel Chair Gps GPCsakthi velNo ratings yet
- DRV8833 Dual H-Bridge Motor Driver: 1 Features 3 DescriptionDocument32 pagesDRV8833 Dual H-Bridge Motor Driver: 1 Features 3 DescriptionlaukejasNo ratings yet