You might also like
- El Naggar2013Document20 pagesEl Naggar2013dodo1986No ratings yet
- Adv. Healthcare Mater. 2021, 2101770 SIDocument10 pagesAdv. Healthcare Mater. 2021, 2101770 SIMelgious AngNo ratings yet
- A Simplified Pipeline Calculations ProgramDocument8 pagesA Simplified Pipeline Calculations ProgramRaakze Movi100% (1)
- Aubo I10 Brochure 2019 PDFDocument6 pagesAubo I10 Brochure 2019 PDFMiro Mirach PremrlNo ratings yet
- Modeling_of_parallel_manipulators_with_fDocument16 pagesModeling_of_parallel_manipulators_with_fducminhho7No ratings yet
- Lane Detection and Tracking Using A New Lane ModelDocument9 pagesLane Detection and Tracking Using A New Lane ModelDomagoj ŠpoljarNo ratings yet
- Project Management Review QuestionsDocument15 pagesProject Management Review Questions19MME-S1-323 Usman Ul Hassan PirzadaNo ratings yet
- Simulation of Short Circuit and LightninDocument14 pagesSimulation of Short Circuit and LightninDejanNo ratings yet
- Màng Oxit Kim Loại Chuyển TiếpDocument52 pagesMàng Oxit Kim Loại Chuyển TiếpNguyên Đỗ DuyNo ratings yet
- Fuzzy Adaptive Control For Direct Torque in Electric VehicleDocument10 pagesFuzzy Adaptive Control For Direct Torque in Electric VehicleKireNo ratings yet
- Archspec Canopie HPC 2020Document8 pagesArchspec Canopie HPC 2020舒敏No ratings yet
- IOP Review PaperDocument10 pagesIOP Review PaperSrinivas GNo ratings yet
- Transient and Steady-State Analysis of A SEPIC Converter by An Average State-Space ModellingDocument5 pagesTransient and Steady-State Analysis of A SEPIC Converter by An Average State-Space ModellingPablo PulacheNo ratings yet
- Research Article: Wideband, Low-Profile, Dual-Polarized Slot Antenna With An AMC Surface For Wireless CommunicationsDocument9 pagesResearch Article: Wideband, Low-Profile, Dual-Polarized Slot Antenna With An AMC Surface For Wireless CommunicationsKarthika KandasamyNo ratings yet
- The Modeling of Inverse Kinematics For 5 Dof Manipulator: SciencedirectDocument8 pagesThe Modeling of Inverse Kinematics For 5 Dof Manipulator: SciencedirectjefriNo ratings yet
- Three-Dimensional FDTD: Lecture OutlineDocument26 pagesThree-Dimensional FDTD: Lecture Outlineatalasa-1No ratings yet
- A High-Power DC-DC Converter Topology For Battery Charging ApplicationsDocument18 pagesA High-Power DC-DC Converter Topology For Battery Charging ApplicationsL CHNo ratings yet
- ICERA2020Document11 pagesICERA2020Lưu Thành PhongNo ratings yet
- Dynamic Analysis of Robot in MachiningDocument14 pagesDynamic Analysis of Robot in MachiningHưng Trần ĐứcNo ratings yet
- Digital Logic Design Lab: Experiment #5 NAND / NOR Logic Circuit ImplementationDocument9 pagesDigital Logic Design Lab: Experiment #5 NAND / NOR Logic Circuit ImplementationMohamad MonerNo ratings yet
- RP-202803 NR - eMIMO WI Summary Core - RevDocument13 pagesRP-202803 NR - eMIMO WI Summary Core - RevBill LiuNo ratings yet
- Wire Less Stepper Motor Controll Using MicrocontrollerDocument51 pagesWire Less Stepper Motor Controll Using MicrocontrollerAnil ReddyNo ratings yet
- ECE 780 Mobile Manipulator Control ComparisonDocument9 pagesECE 780 Mobile Manipulator Control ComparisonChandrasekar ElankannanNo ratings yet
- Cristoiu and Nicolescu - New Approach For Forward Kinematic Modeling of Industrial RobotsDocument9 pagesCristoiu and Nicolescu - New Approach For Forward Kinematic Modeling of Industrial RobotsindustronicaNo ratings yet
- Lattice Diagram For ReflectionDocument11 pagesLattice Diagram For Reflectionagkacdm1163No ratings yet
- LLC Converters Application - Note - Resonant LLC Converter Operation and Design - Infineon PDFDocument19 pagesLLC Converters Application - Note - Resonant LLC Converter Operation and Design - Infineon PDFFabio Pedroso de MoraisNo ratings yet
- Chapter 3. Specific Energy and Control Section: BFC21103 HydraulicsDocument79 pagesChapter 3. Specific Energy and Control Section: BFC21103 Hydraulicsnurizzati hasmiNo ratings yet
- Introduction to Finite Element Analysis for Structural and Heat Transfer ProblemsDocument5 pagesIntroduction to Finite Element Analysis for Structural and Heat Transfer ProblemsCarlos GonzalesNo ratings yet
- Simulation of Short Circuit and Lightning Transients On 110 KV Overhead and Cable Transmission Lines Using ATP-EMTPDocument14 pagesSimulation of Short Circuit and Lightning Transients On 110 KV Overhead and Cable Transmission Lines Using ATP-EMTPDejanNo ratings yet
- A Title Should Be The Fewest Possible Words That Accurately Describe The Content of The PaperDocument4 pagesA Title Should Be The Fewest Possible Words That Accurately Describe The Content of The PaperNatasha AlyaaNo ratings yet
- Deep Learning of Activation EnergiesDocument27 pagesDeep Learning of Activation EnergiesQi LIUNo ratings yet
- Computational Design of An Automotive Twist Beam: Benki Aalae, Habbal Abderrahmane, Mathis GaelDocument11 pagesComputational Design of An Automotive Twist Beam: Benki Aalae, Habbal Abderrahmane, Mathis GaelArif KurniawanNo ratings yet
- Energy Kendaraan Listrik dengan Konsumsi Daya BateraiDocument4 pagesEnergy Kendaraan Listrik dengan Konsumsi Daya BateraiSiti WajNo ratings yet
- A Testable Design of Programmable Logic Arrays With Universal Control A N D Minimal OverheadDocument15 pagesA Testable Design of Programmable Logic Arrays With Universal Control A N D Minimal Overheadgangasani lavanya reddyNo ratings yet
- f32 Book Parallel Pres pt4Document106 pagesf32 Book Parallel Pres pt4Rajesh SunarkaniNo ratings yet
- Apparatus and Demonstration Notes: Josue Njock LibiiDocument10 pagesApparatus and Demonstration Notes: Josue Njock LibiiJuan Manuel RodríguezNo ratings yet
- Apunte HidrostáticaDocument35 pagesApunte HidrostáticaMatias MoralesNo ratings yet
- Research Article: Dynamic Rocker-Bogie: Kinematical Analysis in A High-Speed Traversal Stability EnhancementDocument9 pagesResearch Article: Dynamic Rocker-Bogie: Kinematical Analysis in A High-Speed Traversal Stability EnhancementKanna MonishNo ratings yet
- End Term Examination:: Indian Institute of Technology, KharagpurDocument3 pagesEnd Term Examination:: Indian Institute of Technology, KharagpuraajmaafkaroNo ratings yet
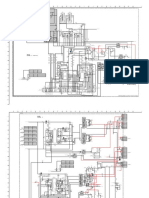
- Sony - g3l - Smps SchematicDocument4 pagesSony - g3l - Smps Schematicகுமார்No ratings yet
- Clca 2018Document6 pagesClca 2018JLuis LuNaNo ratings yet
- A Novel Design of The Roots BlowerDocument13 pagesA Novel Design of The Roots BlowerAsistencia Técnica JLFNo ratings yet
- Mechatronics: Ronghui Zhou, Argyrios Zolotas, Roger GoodallDocument15 pagesMechatronics: Ronghui Zhou, Argyrios Zolotas, Roger GoodallParthipan JayaramNo ratings yet
- Analysis Nonlinear Vibrations of The Three - Phase Composite Shallow Cylindrical ShellDocument6 pagesAnalysis Nonlinear Vibrations of The Three - Phase Composite Shallow Cylindrical ShellIJAERS JOURNALNo ratings yet
- Selection Structures and Looping in CDocument25 pagesSelection Structures and Looping in CSarahmei MeiNo ratings yet
- JaishsbsusjhsjsjshsjDocument105 pagesJaishsbsusjhsjsjshsjashajabarNo ratings yet
- Supplementary Figures: WT1 Ck7 WT1 Ck7Document21 pagesSupplementary Figures: WT1 Ck7 WT1 Ck7Valen EstevezNo ratings yet
- 3DFiniteElementAnalysisofHydraulicEngineMountIncludingFluid-StructureInteractionDocument11 pages3DFiniteElementAnalysisofHydraulicEngineMountIncludingFluid-StructureInteractionAnissa LamraniNo ratings yet
- Control of A DC-DC Buck Converter Through ContractDocument17 pagesControl of A DC-DC Buck Converter Through ContractAnshuman MohantyNo ratings yet
- Paper - Smooth Surfaces From Rational Bilinear Patches - Nº05Document20 pagesPaper - Smooth Surfaces From Rational Bilinear Patches - Nº05enzoNo ratings yet
- Finite JournalDocument7 pagesFinite JournalzahraNo ratings yet
- Panasonic th-32gs490dx Chassis 7n21t SMDocument35 pagesPanasonic th-32gs490dx Chassis 7n21t SMlejojoel321No ratings yet
- Ch. 2: Rigid Body Motions and Homogeneous Transforms: KON 318E: Introduction To Robotics 1Document43 pagesCh. 2: Rigid Body Motions and Homogeneous Transforms: KON 318E: Introduction To Robotics 1Dursun DurmasınNo ratings yet
- Time Minimum Trajectory Planning of A 2-DOF Translational Parallel Robot For Pick-And-Place OperationsDocument4 pagesTime Minimum Trajectory Planning of A 2-DOF Translational Parallel Robot For Pick-And-Place OperationsjeevaNo ratings yet
- Homutescu 2016 IOP Conf. Ser. Mater. Sci. Eng. 147 012143Document8 pagesHomutescu 2016 IOP Conf. Ser. Mater. Sci. Eng. 147 012143Sasi KanthNo ratings yet
- Position and Speed Control of Industrial Robotic Arm Using Robust ControllersDocument6 pagesPosition and Speed Control of Industrial Robotic Arm Using Robust ControllersKhôi PhiNo ratings yet
- Digital Filter Design Using Spreadsheets: Karim Y. Kabalan, Ali El-HajjDocument7 pagesDigital Filter Design Using Spreadsheets: Karim Y. Kabalan, Ali El-Hajjman_93No ratings yet
- Electrical Diagram A860 - v1 1 - 10092012 PDFDocument9 pagesElectrical Diagram A860 - v1 1 - 10092012 PDFFriends TVSHOWNo ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Hamilton-Jacobi Equation: An Intuitive ApproachDocument8 pagesHamilton-Jacobi Equation: An Intuitive Approachvahid mesicNo ratings yet
- PPU 960 Physics Note (Sem 2 Chapter 12 - Electrostatics)Document11 pagesPPU 960 Physics Note (Sem 2 Chapter 12 - Electrostatics)Josh, LRT100% (6)
- Mody Institute of Technology and Science, Lakshmangarh Faculty of Engineering and TechnologyDocument3 pagesMody Institute of Technology and Science, Lakshmangarh Faculty of Engineering and TechnologyAtul GaurNo ratings yet
- Sediment TransportDocument66 pagesSediment TransportFarah KianiNo ratings yet
- 50,000-Liter OHSR Design for Village in MohaliDocument22 pages50,000-Liter OHSR Design for Village in MohaliEr Navneet JassiNo ratings yet
- Bab 1 PDFDocument38 pagesBab 1 PDFPak WijayaNo ratings yet
- Mass & Weight 1 QP - 230820 - 162953Document10 pagesMass & Weight 1 QP - 230820 - 162953anjanamenonNo ratings yet
- Cpcdte093 PDFDocument2 pagesCpcdte093 PDFSamuel Nathan V. IringanNo ratings yet
- TempheatDocument28 pagesTempheatapi-343650677No ratings yet
- Wetted Wall ColumnDocument8 pagesWetted Wall ColumnSameer NasirNo ratings yet
- Design Report 60m High Tower1Document221 pagesDesign Report 60m High Tower1ShashankSinghNo ratings yet
- Navier Stokes EquationsDocument9 pagesNavier Stokes EquationsNikhil AgrawalNo ratings yet
- Introduction PostedDocument64 pagesIntroduction PostedPyarsingh MeenaNo ratings yet
- Assignment XiDocument3 pagesAssignment XiKamran AliNo ratings yet
- Physics Text Book Fourth Edition.Document383 pagesPhysics Text Book Fourth Edition.jessNo ratings yet
- Solutionbank M1: Edexcel AS and A Level Modular MathematicsDocument48 pagesSolutionbank M1: Edexcel AS and A Level Modular MathematicsMaruf_007No ratings yet
- Rotational motion of rigid objectsDocument63 pagesRotational motion of rigid objectsNurulWardhani11No ratings yet
- Colorado School of Mines CHEN403 Stirred Tank Heater Developing Transfer Functions From Heat & Material BalancesDocument8 pagesColorado School of Mines CHEN403 Stirred Tank Heater Developing Transfer Functions From Heat & Material BalancesSatria WijayaNo ratings yet
- Baddi University Syll of MEDocument102 pagesBaddi University Syll of MEKunal KumbhaNo ratings yet
- Lifting Beam CalculationDocument2 pagesLifting Beam Calculationராபர்ட் ஆன்றோ ரெனி100% (4)
- Automotive Brake Design Report SummaryDocument17 pagesAutomotive Brake Design Report SummaryTavi SharmaNo ratings yet
- Plastic Behaviour of Beams and FramesDocument26 pagesPlastic Behaviour of Beams and FramesTom WilkinsonNo ratings yet
- Bridge Calculation DesignDocument23 pagesBridge Calculation Designruspandi.irwanNo ratings yet
- How to Draw Free-Body Diagrams (FBDDocument16 pagesHow to Draw Free-Body Diagrams (FBDJohn WarrycraftNo ratings yet
- Lesson 1 Basics of Thermodynamics: Historical MilestonesDocument11 pagesLesson 1 Basics of Thermodynamics: Historical MilestonesJhonrick MagtibayNo ratings yet
- Pipe Friction Loss ExperimentDocument6 pagesPipe Friction Loss ExperimentSyasya Nurina Binti Mohd FadliNo ratings yet
- Shaft Exercises Problem No. 1-2Document3 pagesShaft Exercises Problem No. 1-2Ariel GamboaNo ratings yet
- Performance-Graded Asphalt Binder Using Multiple Stress Creep Recovery (MSCR) TestDocument8 pagesPerformance-Graded Asphalt Binder Using Multiple Stress Creep Recovery (MSCR) Testmohammed karasnehNo ratings yet
- Super Critical Technology in NTPCDocument24 pagesSuper Critical Technology in NTPCLakshminarayanNo ratings yet