You might also like
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Refer For UwashseattleDocument7 pagesRefer For UwashseattleYash OzaNo ratings yet
- Sampled-Data Sliding Mode Control Design of SingleLink Flexible Joint Robotic ManipulatorDocument4 pagesSampled-Data Sliding Mode Control Design of SingleLink Flexible Joint Robotic Manipulatorabidraza8No ratings yet
- Discrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismDocument10 pagesDiscrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismFernando OrnelasNo ratings yet
- Finite-Time Backstepping Control For Quadrotors With Disturbances and Input ConstraintsDocument13 pagesFinite-Time Backstepping Control For Quadrotors With Disturbances and Input ConstraintselhamNo ratings yet
- Terminal Sliding ModesDocument4 pagesTerminal Sliding ModesAldin BeganovicNo ratings yet
- Nonlinear Control of Two-Wheeled Robot Based On Novel Analysis and Design of SDRE SchemeDocument9 pagesNonlinear Control of Two-Wheeled Robot Based On Novel Analysis and Design of SDRE SchemeMohammed FawziNo ratings yet
- Quadrotor Aircraft Attitude Estimation and Control Based On Kalman FilterDocument6 pagesQuadrotor Aircraft Attitude Estimation and Control Based On Kalman FilterRifqi ZainNo ratings yet
- Adaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural NetworkDocument10 pagesAdaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural Networkdelima palwa sariNo ratings yet
- Neural-Network-Based Terminal Sliding-Mode Control of Robotic Manipulators Including Actuator DynamicsDocument9 pagesNeural-Network-Based Terminal Sliding-Mode Control of Robotic Manipulators Including Actuator DynamicsngothientuNo ratings yet
- Scirobotics Add6864Document14 pagesScirobotics Add6864Kamal KaiNo ratings yet
- Journal-Wheeled Mobile Robot Trajectory Tracking Using Sliding-2Document8 pagesJournal-Wheeled Mobile Robot Trajectory Tracking Using Sliding-2Pham ThuanNo ratings yet
- Enhanced Backstepping Controller Design With ApplicationDocument27 pagesEnhanced Backstepping Controller Design With ApplicationmohammedNo ratings yet
- Adaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsDocument13 pagesAdaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsAravindan MohanNo ratings yet
- ISA Transactions: M. Rida Mokhtari, Brahim CherkiDocument16 pagesISA Transactions: M. Rida Mokhtari, Brahim CherkiSaad HadjiNo ratings yet
- Design and Implementation of PI and Fuzzy PID Supervisory Controllers For A Flexible Link RobotDocument6 pagesDesign and Implementation of PI and Fuzzy PID Supervisory Controllers For A Flexible Link RobotMaNo ratings yet
- Three-Dimensional Crane Modelling and ControlDocument9 pagesThree-Dimensional Crane Modelling and ControlAna MusraNo ratings yet
- Paper ControlDocument8 pagesPaper ControlAndree CrNo ratings yet
- Indirect Fuzzy Adaptive Control of Robotic Manipulator Based On Sliding Mode SchemeDocument6 pagesIndirect Fuzzy Adaptive Control of Robotic Manipulator Based On Sliding Mode Scheme2022 ISSPMNo ratings yet
- ISA Transactions: M. Rida Mokhtari, Amal Choukchou Braham, Brahim CherkiDocument14 pagesISA Transactions: M. Rida Mokhtari, Amal Choukchou Braham, Brahim CherkiSaad HadjiNo ratings yet
- Energy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotDocument13 pagesEnergy Comparison of Controllers Used For A Differential Drive Wheeled Mobile RobotElias GarcíaNo ratings yet
- Drones 06 00220 v2Document20 pagesDrones 06 00220 v2Thanh Pham TuanNo ratings yet
- Project Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectoryDocument19 pagesProject Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectorySidharth Suresh KumarNo ratings yet
- Robust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Document7 pagesRobust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Chandrasekar ElankannanNo ratings yet
- Balancing Control of A Two Wheeled Mobile Robot SystemDocument7 pagesBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabNo ratings yet
- Neural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsDocument9 pagesNeural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsKuldeep KumarNo ratings yet
- Gomaa Et Al - 2022 - Nonlinear MPC Without Terminal Costs or Constraints For Multi-Rotor AerialDocument6 pagesGomaa Et Al - 2022 - Nonlinear MPC Without Terminal Costs or Constraints For Multi-Rotor AerialZhongxian XuNo ratings yet
- Attitude and Position Controller Design and Implem PDFDocument11 pagesAttitude and Position Controller Design and Implem PDFGeorge ChenNo ratings yet
- Robust Optimal Control of Quadrotor Uavs: Received February 13, 2013, Accepted April 16, 2013, Published May 10, 2013Document15 pagesRobust Optimal Control of Quadrotor Uavs: Received February 13, 2013, Accepted April 16, 2013, Published May 10, 2013keshandass4724No ratings yet
- Adaptive Stabilization and Tracking Control of A Nonholonomic Mobile Robot WithDocument8 pagesAdaptive Stabilization and Tracking Control of A Nonholonomic Mobile Robot Withhind90No ratings yet
- 2000-A Nonlinear Disturbance ObserverDocument7 pages2000-A Nonlinear Disturbance ObserverChanel For KidsNo ratings yet
- Điều khiển bệ phóng độ chính xác caoDocument14 pagesĐiều khiển bệ phóng độ chính xác caoHoàng LongNo ratings yet
- A Control Engineers Quide To Sliding Mode ControlDocument14 pagesA Control Engineers Quide To Sliding Mode ControlyalllikNo ratings yet
- TextDocument23 pagesTexttejas_4ruNo ratings yet
- Wang 2011Document5 pagesWang 2011ArunavaNo ratings yet
- Mode GlissantDocument10 pagesMode GlissantSara ZdlNo ratings yet
- Modeling and Control of A 4wheel Skid-Steering MobDocument21 pagesModeling and Control of A 4wheel Skid-Steering MobReeeeeeeeeeNo ratings yet
- Prioritized Control Allocation For Quadrotors Subject To SaturationDocument7 pagesPrioritized Control Allocation For Quadrotors Subject To SaturationARTH PATELNo ratings yet
- Low Level Control of An Omnidirectional Mobile Robot : R. Comasolivas, J. Quevedo, T. Escobet, A. Escobet and J. RomeraDocument7 pagesLow Level Control of An Omnidirectional Mobile Robot : R. Comasolivas, J. Quevedo, T. Escobet, A. Escobet and J. RomeraPrakhar SrivastavaNo ratings yet
- Adaptive Sliding Mode Control With PerturbationDocument13 pagesAdaptive Sliding Mode Control With Perturbationshakti_0001No ratings yet
- A Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingDocument6 pagesA Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingGerardo HernándezNo ratings yet
- High Speed Differential Drive Mobile Robot Path Following Control With Bounded Wheel Speed CommandsDocument6 pagesHigh Speed Differential Drive Mobile Robot Path Following Control With Bounded Wheel Speed CommandsmonikNo ratings yet
- Electronics 11 03499Document18 pagesElectronics 11 03499mezianeNo ratings yet
- Wang 2020Document10 pagesWang 2020BRUNO ALEXIS ALCANTARA TACORANo ratings yet
- Exploring Observer-Based Sliding Mode Control For Nonlinear and Uncertain Systems A Comprehensive ReviewDocument10 pagesExploring Observer-Based Sliding Mode Control For Nonlinear and Uncertain Systems A Comprehensive ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A New Variable Structure PID-Controller Design For Robot ManipulatorsDocument9 pagesA New Variable Structure PID-Controller Design For Robot ManipulatorsMehdi DalirNo ratings yet
- Robust Stabilization of Elastic Joint Robots by ESP and PID Control Theory and ExperimentsDocument8 pagesRobust Stabilization of Elastic Joint Robots by ESP and PID Control Theory and ExperimentsThanh Hai NguyenNo ratings yet
- Robust Path Tracking Control of Nonholonomic Wheeled Mobile Robot: Experimental ValidationDocument9 pagesRobust Path Tracking Control of Nonholonomic Wheeled Mobile Robot: Experimental Validationspandan_roy_1989No ratings yet
- 2 D of ManipulatorDocument7 pages2 D of ManipulatorfsdvNo ratings yet
- Slotine Li Tac 88Document9 pagesSlotine Li Tac 88Linh Chi NguyenNo ratings yet
- Robust Backstepping Sliding-Mode Control and Observer-Based Fault Estimation For A Quadrotor UAVDocument13 pagesRobust Backstepping Sliding-Mode Control and Observer-Based Fault Estimation For A Quadrotor UAVJESUS AMADORNo ratings yet
- Kadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128Document12 pagesKadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128hawicha AbomaNo ratings yet
- Fuzzy+PID Attitude Control of A Co-Axial OctocopterDocument6 pagesFuzzy+PID Attitude Control of A Co-Axial OctocopterVikNo ratings yet
- A Control Method For Hydraulic Manipulators in Automatic Emulsion FillingDocument8 pagesA Control Method For Hydraulic Manipulators in Automatic Emulsion FillingJeffrey Fernandez SalazarNo ratings yet
- 13 Reza2 ACEDocument6 pages13 Reza2 ACEGál Károly-IstvánNo ratings yet
- A Stable Tracking Control Method For An Autonomous Mobile RobotDocument6 pagesA Stable Tracking Control Method For An Autonomous Mobile RobotRaj KanoriaNo ratings yet
- Robotics 11 00080 v2Document15 pagesRobotics 11 00080 v2Francesco TedescoNo ratings yet
- Observer-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehicleDocument6 pagesObserver-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehiclemailtosshettyNo ratings yet
- 3j Yir T.!!:..: Stability Criteria in Controlling Mobile Robotic SystemsDocument7 pages3j Yir T.!!:..: Stability Criteria in Controlling Mobile Robotic SystemsdsfewsNo ratings yet
- Reuse of Greywater and Its Role in The Sustainability of Water Resources - A Study in Saudi ArabiaDocument6 pagesReuse of Greywater and Its Role in The Sustainability of Water Resources - A Study in Saudi ArabiaPriyanka KilaniyaNo ratings yet
- Utilization of Form-Stable Paraffin/Nano-Silica Phase Change Materials For Thermal Energy Storage Enhancement in MortarDocument9 pagesUtilization of Form-Stable Paraffin/Nano-Silica Phase Change Materials For Thermal Energy Storage Enhancement in MortarPriyanka KilaniyaNo ratings yet
- Design and Simulation of InGaAs/GaAsSb single quantum well structure for optical fiber application: Electronic Band Structure, Carrier Transport, and Optical Gain AnalysisDocument4 pagesDesign and Simulation of InGaAs/GaAsSb single quantum well structure for optical fiber application: Electronic Band Structure, Carrier Transport, and Optical Gain AnalysisPriyanka KilaniyaNo ratings yet
- The Role of The Microbiome in Antibiotic Resistance and Infection ControlDocument6 pagesThe Role of The Microbiome in Antibiotic Resistance and Infection ControlPriyanka KilaniyaNo ratings yet
- Design Analysis of An IoT Based Early Flood Detection and Alerting SystemDocument10 pagesDesign Analysis of An IoT Based Early Flood Detection and Alerting SystemPriyanka KilaniyaNo ratings yet
- Machine Learning Model For Attenuating Outliers in Stock DataDocument11 pagesMachine Learning Model For Attenuating Outliers in Stock DataPriyanka KilaniyaNo ratings yet
- "Determinants of Digital Financial Inclusion and Its Impact On Micro Enterprises" Ease of Doing Business, A Comprehensive ReviewDocument8 pages"Determinants of Digital Financial Inclusion and Its Impact On Micro Enterprises" Ease of Doing Business, A Comprehensive ReviewPriyanka KilaniyaNo ratings yet
- Stability and Adaptation of Soya Strains Based On Different Models in The North and Northeast RegionsDocument7 pagesStability and Adaptation of Soya Strains Based On Different Models in The North and Northeast RegionsPriyanka KilaniyaNo ratings yet
- Galala Bridge Scour Model On Ambon's Way Ruhu RiverDocument7 pagesGalala Bridge Scour Model On Ambon's Way Ruhu RiverPriyanka KilaniyaNo ratings yet
- Fixed Point Results For Single-Valued Mappings On A Set With Two Metrics Using A Dass Gupta-Type Bilateral ContractionDocument10 pagesFixed Point Results For Single-Valued Mappings On A Set With Two Metrics Using A Dass Gupta-Type Bilateral ContractionPriyanka KilaniyaNo ratings yet
- Adherence To Pharmacological Treatment of Systemic Arterial Hypertension in Primary CareDocument6 pagesAdherence To Pharmacological Treatment of Systemic Arterial Hypertension in Primary CarePriyanka KilaniyaNo ratings yet
- A Comprehensive Review On Intelligence Control For Complex SystemDocument6 pagesA Comprehensive Review On Intelligence Control For Complex SystemPriyanka KilaniyaNo ratings yet
- Evaluation of The Algerian Pilot Program of Colorectal Cancer Screening by Immunological TestDocument9 pagesEvaluation of The Algerian Pilot Program of Colorectal Cancer Screening by Immunological TestPriyanka KilaniyaNo ratings yet
- Balancing Safety, Financial Performance, and Environmental Sustainability in Ghana's Gold Mining OperationsDocument18 pagesBalancing Safety, Financial Performance, and Environmental Sustainability in Ghana's Gold Mining OperationsPriyanka KilaniyaNo ratings yet
- Evaluation With Different Amounts of Moisture and Temperature in The Substrate On The Vigor and Germination of Soybean SeedsDocument4 pagesEvaluation With Different Amounts of Moisture and Temperature in The Substrate On The Vigor and Germination of Soybean SeedsPriyanka KilaniyaNo ratings yet
- Equations of A Synchronous Machine in Phase Coordinates For Asymmetrical Short Circuits and Their SolutionsDocument11 pagesEquations of A Synchronous Machine in Phase Coordinates For Asymmetrical Short Circuits and Their SolutionsPriyanka KilaniyaNo ratings yet
- Food Supplementation For Beef Cattle Raised On Pasture in The North of Minas GeraisDocument14 pagesFood Supplementation For Beef Cattle Raised On Pasture in The North of Minas GeraisPriyanka KilaniyaNo ratings yet
- Consequences and What The Risks of AutomedicationDocument4 pagesConsequences and What The Risks of AutomedicationPriyanka KilaniyaNo ratings yet
- Elements of A New Rhetoric in Foucault's WorkDocument5 pagesElements of A New Rhetoric in Foucault's WorkPriyanka KilaniyaNo ratings yet
- DS 20221019 SG4400UD-MV-20 Datasheet V14 ENDocument2 pagesDS 20221019 SG4400UD-MV-20 Datasheet V14 ENJosue Crespo GonzalezNo ratings yet
- Black Holes in General Relativity and STDocument17 pagesBlack Holes in General Relativity and STDiogo MesquitaNo ratings yet
- 3.2training - Manual - TBN Steam Path (Bucket)Document15 pages3.2training - Manual - TBN Steam Path (Bucket)Tung Nguyen100% (1)
- Teach A Course - 3: Dcs Industry-InstrumentationDocument93 pagesTeach A Course - 3: Dcs Industry-InstrumentationAlbaryan SadewaNo ratings yet
- Digital Image Processing: Fourth EditionDocument83 pagesDigital Image Processing: Fourth EditionIshtiaqNo ratings yet
- Earthquake Analysis Concrete Gravity DamsDocument14 pagesEarthquake Analysis Concrete Gravity DamsCan EryilmazNo ratings yet
- Quantum Computing With Neutral AtomsDocument41 pagesQuantum Computing With Neutral AtomsVictor FestNo ratings yet
- Sanwa YX-360TR MultitesterDocument14 pagesSanwa YX-360TR Multitestersupun_tharanga100% (1)
- 1K Glueline: Solutions For The Application of 1K Adhesives and SealantsDocument23 pages1K Glueline: Solutions For The Application of 1K Adhesives and Sealants李钊No ratings yet
- Module 1 Measurement VectorDocument25 pagesModule 1 Measurement VectorGreen BrainNo ratings yet
- 1SDA104331R1 E2 2s E9 2500 Ekip Touch Lsi 3p FHRDocument4 pages1SDA104331R1 E2 2s E9 2500 Ekip Touch Lsi 3p FHRAhmedBDNo ratings yet
- NT 2022 Gtu PyqDocument3 pagesNT 2022 Gtu PyqSandeep kumarNo ratings yet
- TCS 01Document6 pagesTCS 01Vishnu PrajapatiNo ratings yet
- Data Sheet 3VM1010-2ED32-0AA0: ModelDocument4 pagesData Sheet 3VM1010-2ED32-0AA0: ModelACP DAVID VARGASNo ratings yet
- General Series Overhead Crane: User ManualDocument30 pagesGeneral Series Overhead Crane: User ManualjokoNo ratings yet
- STK4181 AF Power Amplifier (Split Power Supply) (45W + 45W Min, THD 0.08%)Document8 pagesSTK4181 AF Power Amplifier (Split Power Supply) (45W + 45W Min, THD 0.08%)João Carlos EspindolaNo ratings yet
- 2018 G11 Physics EM Freebooks - PK PDFDocument271 pages2018 G11 Physics EM Freebooks - PK PDFAlishba ZahidNo ratings yet
- SS2100 H S Analyzer: Hardware Installation and Maintenance Manual Hardware Installation and Maintenance ManualDocument118 pagesSS2100 H S Analyzer: Hardware Installation and Maintenance Manual Hardware Installation and Maintenance ManualEduardo MontrealNo ratings yet
- Cable Testing Seminar DhakaDocument38 pagesCable Testing Seminar DhakaSultan Uddin KhanNo ratings yet
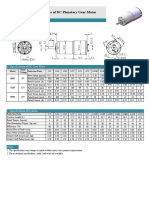
- OD32mm DC Gear Motor-1Document8 pagesOD32mm DC Gear Motor-1Humberto GalvezNo ratings yet
- Lesson2 1-LightDocument4 pagesLesson2 1-LightGrace06 LabinNo ratings yet
- Lecture 10 - HydrodynamicsDocument10 pagesLecture 10 - HydrodynamicsPercival ArcherNo ratings yet
- Leaflet VertiDrive M3Document2 pagesLeaflet VertiDrive M3Kenan mira Mohammed NasherNo ratings yet
- wch15 01 Rms 20240118Document38 pageswch15 01 Rms 20240118John WongNo ratings yet
- Rittal 9320020 Technical Details 3 2891Document3 pagesRittal 9320020 Technical Details 3 2891Gustavo GamezNo ratings yet
- European Steel and Alloy Grades: X90Crmov18 (1.4112)Document2 pagesEuropean Steel and Alloy Grades: X90Crmov18 (1.4112)farshid KarpasandNo ratings yet
- Sintering Performance of Magnetite-Hematite-GoethiDocument19 pagesSintering Performance of Magnetite-Hematite-GoethiDeidaNo ratings yet
- GravitationDocument36 pagesGravitationSATHIASEELAN SIVANANDAM, AdvocateNo ratings yet
- Science Class X Sample Test Paper 03 For Board Exam 2020 21 Answer 1Document15 pagesScience Class X Sample Test Paper 03 For Board Exam 2020 21 Answer 1jkc collegeNo ratings yet
- (PDF) Question DPP 1 - TrigonometryDocument3 pages(PDF) Question DPP 1 - TrigonometryVarun BhasinNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItFrom EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItRating: 4 out of 5 stars4/5 (25)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyFrom EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyRating: 5 out of 5 stars5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AFrom EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANo ratings yet
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeFrom EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeRating: 4 out of 5 stars4/5 (9)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Gas Turbines: A Handbook of Air, Land and Sea ApplicationsFrom EverandGas Turbines: A Handbook of Air, Land and Sea ApplicationsRating: 4 out of 5 stars4/5 (9)
- Mechanical Vibrations and Condition MonitoringFrom EverandMechanical Vibrations and Condition MonitoringRating: 5 out of 5 stars5/5 (1)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Piping Design for Industrial Facilities: Understanding Codes and StandardsFrom EverandPiping Design for Industrial Facilities: Understanding Codes and StandardsRating: 4 out of 5 stars4/5 (1)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersFrom EverandBulk Material Handling: Practical Guidance for Mechanical EngineersRating: 5 out of 5 stars5/5 (1)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet