You might also like
- Photovoltaics | 101: The hands-on beginner's guide for designing an on-grid or off-grid PV systemFrom EverandPhotovoltaics | 101: The hands-on beginner's guide for designing an on-grid or off-grid PV systemNo ratings yet
- Mobile Charger Based On Solar Energy With Solar Tracking SystemDocument6 pagesMobile Charger Based On Solar Energy With Solar Tracking SystemKarthik RamarathinamNo ratings yet
- Off Grid Solar Power: The Ultimate Step by Step Guide to Install Solar Energy Systems. Cut Down on Expensive Bills and Make Your House Completely Self-SustainableFrom EverandOff Grid Solar Power: The Ultimate Step by Step Guide to Install Solar Energy Systems. Cut Down on Expensive Bills and Make Your House Completely Self-SustainableNo ratings yet
- Design, Modeling and Testing of A Standalone Single-Axis Active Solar Tracker Using MATLAB/SimulinkDocument20 pagesDesign, Modeling and Testing of A Standalone Single-Axis Active Solar Tracker Using MATLAB/SimulinkVishal FernandesNo ratings yet
- My I Cece 2010 PaperDocument5 pagesMy I Cece 2010 Papercheenu15No ratings yet
- Design and Construction of An Automatic Solar Tracking SystemDocument5 pagesDesign and Construction of An Automatic Solar Tracking SystemAnonymous 3wzIrvMNo ratings yet
- 'Chapter One 1. Background: Dual Axis Solar TrackerDocument59 pages'Chapter One 1. Background: Dual Axis Solar Trackerabel tibebuNo ratings yet
- ThesisDocument5 pagesThesisKaryl Shaine MacombisNo ratings yet
- Project Solar Tracking SystemDocument29 pagesProject Solar Tracking SystemJacob B Chacko100% (1)
- Dual Axis Solar Tracker With IoT Monitoring SystemDocument8 pagesDual Axis Solar Tracker With IoT Monitoring SystemDARSHANI WAGHMARENo ratings yet
- A Project Report ON Solar Lighting System: Submitted byDocument38 pagesA Project Report ON Solar Lighting System: Submitted byshivakumarNo ratings yet
- Arduino Solar TrackerDocument36 pagesArduino Solar TrackerSyed Arefin67% (3)
- Solar Power Monitoring Using IoT (Report Book)Document41 pagesSolar Power Monitoring Using IoT (Report Book)Moin NordenNo ratings yet
- Hydraulic Solar Tracking System Maximizes Solar Panel EfficiencyDocument17 pagesHydraulic Solar Tracking System Maximizes Solar Panel EfficiencywonitiNo ratings yet
- Design & Development of Bidirectional Solar Tracking System Implemented in Western Region of MaharashtraDocument5 pagesDesign & Development of Bidirectional Solar Tracking System Implemented in Western Region of MaharashtraIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Dual Axis Solar TrackerDocument24 pagesDual Axis Solar Trackerpatel_nirav1992No ratings yet
- Btech EEE Major Project Report On Automatic Solar Tracking SystemDocument31 pagesBtech EEE Major Project Report On Automatic Solar Tracking System12deep2001No ratings yet
- Dual Axis Solar Tracking System With Weather SensorDocument5 pagesDual Axis Solar Tracking System With Weather SensorEditor IJTSRDNo ratings yet
- Dual Axis Solar Tracker With CleanerDocument6 pagesDual Axis Solar Tracker With CleanerIJRASETPublicationsNo ratings yet
- Automatic Cleaning System For Solar PanelDocument8 pagesAutomatic Cleaning System For Solar PanelSHIELDNo ratings yet
- Manu PDFDocument4 pagesManu PDFVipin palNo ratings yet
- Implementation of Dual Axis Solar Tracker Model by Using MicrocontrollerDocument5 pagesImplementation of Dual Axis Solar Tracker Model by Using MicrocontrollerAbdul KutaNo ratings yet
- 3D Solar Cell Technology PresentationDocument15 pages3D Solar Cell Technology PresentationPankaj DeshmukhNo ratings yet
- Institute of Engineering & Science Ips Academy Indore: Major Project ReportDocument33 pagesInstitute of Engineering & Science Ips Academy Indore: Major Project Reportshruti20_mittalNo ratings yet
- Mini Project DocumentationDocument28 pagesMini Project DocumentationRajeevReddyNareddulaNo ratings yet
- SOLAR PV PLANT PROPOSALDocument12 pagesSOLAR PV PLANT PROPOSALkartik kapoorNo ratings yet
- 2 Solar Tracking System-2.Document33 pages2 Solar Tracking System-2.m durga prasannaNo ratings yet
- Automatic Solar Panel Positioning and Maintenance SystemDocument9 pagesAutomatic Solar Panel Positioning and Maintenance SystemIJRASETPublicationsNo ratings yet
- IJCRT2205627Document8 pagesIJCRT2205627Sai DhanushNo ratings yet
- An Introduction to Solar Tracking SystemsDocument35 pagesAn Introduction to Solar Tracking SystemspawantwrNo ratings yet
- A Survey On Floating Solar Power SystemDocument7 pagesA Survey On Floating Solar Power SystemChandan S GanigNo ratings yet
- Solar Based Remote Car1Document36 pagesSolar Based Remote Car1kamalahasanmNo ratings yet
- Effective Solar Tracking System Maximizes Renewable EnergyDocument38 pagesEffective Solar Tracking System Maximizes Renewable EnergyPraveen KumarNo ratings yet
- Design and Implementation of An Off-Grid Solar Tracker Control System Using Proteus 8.1Document9 pagesDesign and Implementation of An Off-Grid Solar Tracker Control System Using Proteus 8.1Hachimenum AmadiNo ratings yet
- Maximizing Solar Energy Output with an Automatic Sun Tracking SystemDocument19 pagesMaximizing Solar Energy Output with an Automatic Sun Tracking SystemKarthik VanamNo ratings yet
- Dual Axis Solar Tracking System With Weather SensorDocument6 pagesDual Axis Solar Tracking System With Weather SensorIJRASETPublicationsNo ratings yet
- Chapter-1: 1.2 Why To Use Solar Tracking SystemDocument46 pagesChapter-1: 1.2 Why To Use Solar Tracking Systemmgitecetech100% (1)
- Solar Tracking System For Efficient Power Generation Using Image ProcessingDocument9 pagesSolar Tracking System For Efficient Power Generation Using Image ProcessingIJRASETPublicationsNo ratings yet
- Solar Tree-Working Principle, Arrangements-A Study: Prof - Rajashri K Patil Assistant ProfessorDocument5 pagesSolar Tree-Working Principle, Arrangements-A Study: Prof - Rajashri K Patil Assistant ProfessorSukanya NNo ratings yet
- Automated solar panel trackingDocument7 pagesAutomated solar panel trackingReymond ElopreNo ratings yet
- Renewable Energy Journal Modeling Active Solar TrackerDocument16 pagesRenewable Energy Journal Modeling Active Solar Trackerعبدالله نعمان آلزبيديNo ratings yet
- Solar PV Individual ReportDocument7 pagesSolar PV Individual ReportshathishNo ratings yet
- Rushi Bhaiya ProjectDocument29 pagesRushi Bhaiya ProjectRushikesh MundeNo ratings yet
- Literature Review Solar PanelDocument7 pagesLiterature Review Solar Panelc5r08vf7100% (1)
- Solar Project REPORTDocument15 pagesSolar Project REPORTismailNo ratings yet
- 84 ArticleText 422 1 10 20211027Document10 pages84 ArticleText 422 1 10 20211027aakash.ht007No ratings yet
- Solar TrackerDocument36 pagesSolar TrackerdivyeshNo ratings yet
- Dual Axis Solar Radiation Tracking System: Pamantasan NG Lungsod NG MaynilaDocument12 pagesDual Axis Solar Radiation Tracking System: Pamantasan NG Lungsod NG MaynilamgoldiieeeeNo ratings yet
- Tarun Jadhav - WONDERS OF SOLAR - Solar PV Guide - Design, Installation - MaintenanceDocument93 pagesTarun Jadhav - WONDERS OF SOLAR - Solar PV Guide - Design, Installation - MaintenanceRAFAEL CAISIPNo ratings yet
- Hydraulic Solar Tracking System Project ReportDocument37 pagesHydraulic Solar Tracking System Project Reportdivyesh67% (3)
- Low Cost Solar Tracking System in WesterDocument16 pagesLow Cost Solar Tracking System in WesterBrent FabialaNo ratings yet
- Solar Cell Portable Using Dynamic Rotation System: Adhi Bagus Pribadi Fauzy Satrio WibowoDocument4 pagesSolar Cell Portable Using Dynamic Rotation System: Adhi Bagus Pribadi Fauzy Satrio WibowoMuhammad Reza ImaduddinNo ratings yet
- Sun Tracking ThesisDocument7 pagesSun Tracking ThesisNeedSomeoneWriteMyPaperSingapore100% (2)
- Jurnal Otomasi Sistem Tracking Solar SystemDocument8 pagesJurnal Otomasi Sistem Tracking Solar SystemYudha Eko PrasetyoNo ratings yet
- 401-Liaket - GSTJ (BP)Document11 pages401-Liaket - GSTJ (BP)Anjan ThirteenNo ratings yet
- Track solar energy efficiency with automatic trackerDocument31 pagesTrack solar energy efficiency with automatic trackerThayswendy MartinezNo ratings yet
- 12 Vol 100 No 22Document11 pages12 Vol 100 No 22Somatic5.0 KabayanNo ratings yet
- Dual Axis Solar Tracking SystemDocument9 pagesDual Axis Solar Tracking SystemIJRASETPublicationsNo ratings yet
- Solar Sun Seeker: Project SynopsisDocument19 pagesSolar Sun Seeker: Project SynopsisRahul Kesharwani GuptaNo ratings yet
- (Anwar, Sohail PDFDocument616 pages(Anwar, Sohail PDFZarrit RidaNo ratings yet
- A. B. C. D.: 1. For The System in The Given Figure The Characteristic Equation IsDocument10 pagesA. B. C. D.: 1. For The System in The Given Figure The Characteristic Equation IsArmando LiosNo ratings yet
- Boonton Micro Wattmeters Models 42 B, BD, C, CD IEEE-488 InterfaceDocument2 pagesBoonton Micro Wattmeters Models 42 B, BD, C, CD IEEE-488 Interface240GL guyNo ratings yet
- Manual LL de Pinter ToshibbaDocument109 pagesManual LL de Pinter ToshibbaSarah MillerNo ratings yet
- Restricted Earth Fault (REF) ProtectionDocument8 pagesRestricted Earth Fault (REF) ProtectionNaveen Amarasinghe100% (1)
- 254624-400-SP-ELE-007-Rev C-FINALDocument37 pages254624-400-SP-ELE-007-Rev C-FINALEmma NuNo ratings yet
- J. Electrochem. Soc.-2017-Darling-E3081-91Document11 pagesJ. Electrochem. Soc.-2017-Darling-E3081-91Geovanny JaenzNo ratings yet
- Qdoc - Tips Solution Manual For Basic Engineering Circuit AnalDocument52 pagesQdoc - Tips Solution Manual For Basic Engineering Circuit AnalSalmansajidNo ratings yet
- ELEC3405 Lab Notes Optical Communication SystemsDocument29 pagesELEC3405 Lab Notes Optical Communication SystemssakilakumaresanNo ratings yet
- Alto MonitorDocument25 pagesAlto MonitorTiago MendesNo ratings yet
- Fire Sensor AlarmDocument20 pagesFire Sensor Alarmeafz111No ratings yet
- Wms Manual Servicio Completo Tragamonedas Jarquin Ronald PDFDocument189 pagesWms Manual Servicio Completo Tragamonedas Jarquin Ronald PDFRicardo Almeida33% (3)
- Otus 1: Single-Phase Electricity MeterDocument2 pagesOtus 1: Single-Phase Electricity Metersmart meter rusafaNo ratings yet
- Zapi h2 Pump Controller 969Document3 pagesZapi h2 Pump Controller 969SaveliyGovorkovNo ratings yet
- Chapter 15 Direct Current Circuit NewDocument28 pagesChapter 15 Direct Current Circuit NewmaiyaaNo ratings yet
- EE 151 PresentationDocument241 pagesEE 151 PresentationfierykarrNo ratings yet
- PHOTONICS COMMUNICATION: AN OVERVIEWDocument14 pagesPHOTONICS COMMUNICATION: AN OVERVIEWKavithaNo ratings yet
- Scope and Objective of The CourseDocument2 pagesScope and Objective of The CourseAnimesh ChoudharyNo ratings yet
- VSV-LVDT CalibrationDocument5 pagesVSV-LVDT Calibrationكولبي ماكينجوNo ratings yet
- Field Guide To PolarizationDocument143 pagesField Guide To PolarizationChang MingNo ratings yet
- Lunar RF Diagnostic X-Ray High Voltage Generator User ManualDocument63 pagesLunar RF Diagnostic X-Ray High Voltage Generator User Manualanand shekhawat100% (1)
- Hyperloop Transportation System: Analysis, Design, Control and ImplementationDocument9 pagesHyperloop Transportation System: Analysis, Design, Control and Implementationkumar pranavNo ratings yet
- Mosfet To TfetDocument4 pagesMosfet To TfetmuktikantaNo ratings yet
- Construction Manager Superintendent General Foreman in New York City Resume John SmithDocument5 pagesConstruction Manager Superintendent General Foreman in New York City Resume John SmithJohnSmithNo ratings yet
- Al8860 1019719Document18 pagesAl8860 1019719hansNo ratings yet
- Datasheet - MSP 452-11/11Y: Ordering DetailsDocument4 pagesDatasheet - MSP 452-11/11Y: Ordering DetailsTecno Industrias C.A.No ratings yet
- Eaton Bussmann NH 500 Volts GG Fuses Datasheet 10164 en GBDocument20 pagesEaton Bussmann NH 500 Volts GG Fuses Datasheet 10164 en GBGioj MejNo ratings yet
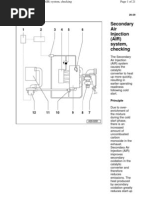
- Audi TT Sec AirDocument21 pagesAudi TT Sec Airdonghungco080% (1)
- Read device manual before use to avoid injuryDocument3 pagesRead device manual before use to avoid injuryعلي جعبريNo ratings yet
- TDA2611Document3 pagesTDA2611Gandhi HammoudNo ratings yet
- Experiment 09: N-Channel Mosfet Output and Transfer CharacteristicsDocument5 pagesExperiment 09: N-Channel Mosfet Output and Transfer CharacteristicsKani Mozhi100% (1)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)