You might also like
- Analysis and Modeling of Flooding in Urban Drainage Systems: Theo G. Schmitt, Martin Thomas, Norman EttrichDocument12 pagesAnalysis and Modeling of Flooding in Urban Drainage Systems: Theo G. Schmitt, Martin Thomas, Norman EttrichWulandari PutriNo ratings yet
- The Effect of Pressure On Leakage in Water Distribution SystemsDocument22 pagesThe Effect of Pressure On Leakage in Water Distribution SystemsThejaswiniNo ratings yet
- The Effect of Pressure On Leakage in Water Distribution SystemsDocument22 pagesThe Effect of Pressure On Leakage in Water Distribution SystemsJohn Michael Capulla CadienteNo ratings yet
- 2003 Karnery Energy Cost Leaky Pipes KarneyDocument10 pages2003 Karnery Energy Cost Leaky Pipes KarneyJuan Jose Escobar MoralesNo ratings yet
- I RJ Mets 30900023612Document8 pagesI RJ Mets 30900023612IRJMETS JOURNALNo ratings yet
- Van Zyl 2017 JWSRT Evaluating The Pressure-Leakage Behaviour of Leaks in Water Pipes PDFDocument14 pagesVan Zyl 2017 JWSRT Evaluating The Pressure-Leakage Behaviour of Leaks in Water Pipes PDFguhmoroNo ratings yet
- Lisa - KingDocument6 pagesLisa - KingamirNo ratings yet
- Sustainability 13 09119 v2Document17 pagesSustainability 13 09119 v2Sasanga HewagamaNo ratings yet
- Kaur 2017 IOP Conf. Ser. Mater. Sci. Eng. 251 012128Document9 pagesKaur 2017 IOP Conf. Ser. Mater. Sci. Eng. 251 012128gesap35224No ratings yet
- CFD Model Improves Algae Pond DesignDocument9 pagesCFD Model Improves Algae Pond DesignListian Fiqri PratamaNo ratings yet
- JAFM - Volume 12 - Issue 2 - Pages 485-494Document10 pagesJAFM - Volume 12 - Issue 2 - Pages 485-494Hicham HichamNo ratings yet
- Teaching Turbulent Flow Through Pipe Fittings Using Computational Fluid Dynamics ApproachDocument18 pagesTeaching Turbulent Flow Through Pipe Fittings Using Computational Fluid Dynamics ApproachShashank TiwariNo ratings yet
- 2020 AE - Typical Hydrodynamic Model For NettingDocument23 pages2020 AE - Typical Hydrodynamic Model For Nettingnorthern FishNo ratings yet
- (Schueler, 1995) - The Importance of ImperviousnessDocument12 pages(Schueler, 1995) - The Importance of Imperviousnessmontgomery999No ratings yet
- Artigo Cientifico CFDDocument7 pagesArtigo Cientifico CFDJanduir FilhoNo ratings yet
- Keramat 2020Document18 pagesKeramat 2020Mosameem ARNo ratings yet
- Research Article: Flood Analysis With HEC-RAS: A Case Study of Tigris RiverDocument13 pagesResearch Article: Flood Analysis With HEC-RAS: A Case Study of Tigris RiverNur HazwaniNo ratings yet
- A Contamination Risk Model For Water DisDocument7 pagesA Contamination Risk Model For Water Disaz_zakiNo ratings yet
- ch86 12 3Document82 pagesch86 12 3ab.djaidNo ratings yet
- Modeling The Effect of Downstream Drain Geometry On Seepage Throughearth DamsDocument21 pagesModeling The Effect of Downstream Drain Geometry On Seepage Throughearth DamsElizabeth huamantinco veraNo ratings yet
- Pore-scale investigation reveals factors controlling hydraulic conductivityDocument13 pagesPore-scale investigation reveals factors controlling hydraulic conductivityAli AhmadNo ratings yet
- 2 Hydrology Basic ConceptsDocument42 pages2 Hydrology Basic ConceptsrohitsinghNo ratings yet
- Analysis of Internal Fluid Motion in An Archimedes Screw Using Computational Fluid MechanicsDocument16 pagesAnalysis of Internal Fluid Motion in An Archimedes Screw Using Computational Fluid MechanicsShahzaib KhanNo ratings yet
- Modelling coastal flood inundation in Thane City, IndiaDocument11 pagesModelling coastal flood inundation in Thane City, IndiaShivkumar PujariNo ratings yet
- 1 s2.0 S2090447921000125 MainDocument12 pages1 s2.0 S2090447921000125 Mainkatyusha FioreNo ratings yet
- Impact of A Changing Environment On Drainage System PerformanceDocument8 pagesImpact of A Changing Environment On Drainage System PerformanceMuhammed Ahmed100% (1)
- Flood Risk and Social Justice: Chapter 12: Floods and Drainage SystemDocument16 pagesFlood Risk and Social Justice: Chapter 12: Floods and Drainage SystemCarlosMesaNo ratings yet
- Hydrology: An Efficient GPU Implementation of A Coupled Overland-Sewer Hydraulic Model With Pollutant TransportDocument22 pagesHydrology: An Efficient GPU Implementation of A Coupled Overland-Sewer Hydraulic Model With Pollutant TransportOliver Colmenares Cortés100% (1)
- Technical Guide to Sewerage System DesignDocument34 pagesTechnical Guide to Sewerage System Designrizkboss8312No ratings yet
- Applied Energy: C.T. Cheung, K.W. Mui, L.T. WongDocument7 pagesApplied Energy: C.T. Cheung, K.W. Mui, L.T. WongFuad Al-AwzariNo ratings yet
- Energy DissipationDocument8 pagesEnergy DissipationDost Engineering ServicesNo ratings yet
- IOP Conference Series: Earth and Environmental Science - Rainfall Infiltration ModelDocument17 pagesIOP Conference Series: Earth and Environmental Science - Rainfall Infiltration ModelwatersakanaNo ratings yet
- Pak 2017Document15 pagesPak 2017Emanuel RicardoNo ratings yet
- Capacity Reliability of Water Distribution SystemsDocument11 pagesCapacity Reliability of Water Distribution SystemsreddyNo ratings yet
- Ocean Engineering: Aly Mousaad Aly, Erin DoughertyDocument20 pagesOcean Engineering: Aly Mousaad Aly, Erin DoughertyLizbeth AMNo ratings yet
- SWMT Bahan Tayang Kuliah TamuDocument5 pagesSWMT Bahan Tayang Kuliah TamuNurul Meilani hasanNo ratings yet
- Simulating Stream-Aquifer Interactions Using HEC-RAS and MODFLOWDocument14 pagesSimulating Stream-Aquifer Interactions Using HEC-RAS and MODFLOWJohan Styweart Londoño GiraldoNo ratings yet
- Sediment Removal Efficacy of Coanda Effect ScreensDocument20 pagesSediment Removal Efficacy of Coanda Effect ScreensRizky Thezacky SevenfoldismNo ratings yet
- A Full-Scale Fluvial Flood Modelling Framework Based On A High-Performance Integrated Hydrodynamic Modelling System (HiPIMS)Document42 pagesA Full-Scale Fluvial Flood Modelling Framework Based On A High-Performance Integrated Hydrodynamic Modelling System (HiPIMS)Hari YuwonoNo ratings yet
- Journal of Water Process Engineering: SciencedirectDocument18 pagesJournal of Water Process Engineering: Sciencedirectali boubakriNo ratings yet
- NCR 42 Ncrdays2018 Bookofabstracts Web-47-48Document2 pagesNCR 42 Ncrdays2018 Bookofabstracts Web-47-48Usman Ali KhanNo ratings yet
- Impact of Networks Sectorization On Water Pressure Transient in Pipelines - Case Study of Casablanca City, MoroccoDocument20 pagesImpact of Networks Sectorization On Water Pressure Transient in Pipelines - Case Study of Casablanca City, MoroccoBadreddine EssaidiNo ratings yet
- 200220158I82IZNMRiskAnalysis NewMellingHEPDocument33 pages200220158I82IZNMRiskAnalysis NewMellingHEPAvipsha MohantyNo ratings yet
- Determination of Submergence DepthDocument8 pagesDetermination of Submergence DepthManikandanNo ratings yet
- Experimental and Numerical Modeling of Sidewall Orifices: Weiping Cheng Yongxin Shen Gang XuDocument20 pagesExperimental and Numerical Modeling of Sidewall Orifices: Weiping Cheng Yongxin Shen Gang XuRodrigo LimaNo ratings yet
- Stovin Et Al. 2012Document14 pagesStovin Et Al. 2012CarlosNo ratings yet
- Discharge Relations For Hydraulic Structures and Head Losses From Different ComponentsDocument160 pagesDischarge Relations For Hydraulic Structures and Head Losses From Different ComponentsEdgar Chuquipiondo VargasNo ratings yet
- Effects of river changesDocument8 pagesEffects of river changesJulianNo ratings yet
- Research On The Cavitation Characteristic of Kaplan Turbine Under Sediment Flow ConditionDocument10 pagesResearch On The Cavitation Characteristic of Kaplan Turbine Under Sediment Flow ConditionFabio FolpiniNo ratings yet
- Dams and Dam FailureDocument10 pagesDams and Dam FailureshivanandarcotNo ratings yet
- Dwes 13 29 2020Document13 pagesDwes 13 29 2020z1428065770No ratings yet
- Probabilistic Analysis of The Obstruction of Water Sources Due To The Occurrence of Rain-Triggered Mass MovementsDocument12 pagesProbabilistic Analysis of The Obstruction of Water Sources Due To The Occurrence of Rain-Triggered Mass MovementsLaura Ortiz GiraldoNo ratings yet
- Modeling and Applications of 3D Flow in Orifice Plate at Low Turbulent Reynolds NumbersDocument7 pagesModeling and Applications of 3D Flow in Orifice Plate at Low Turbulent Reynolds NumbersLucas BomfimNo ratings yet
- Cramer2015 - Detecting and Correcting Pipeline LeaksDocument16 pagesCramer2015 - Detecting and Correcting Pipeline LeaksHenriqueNo ratings yet
- Lecture15-16 HydrographsUpdatedDocument64 pagesLecture15-16 HydrographsUpdatedLurima FariaNo ratings yet
- Water Conservation On Drain SizingDocument15 pagesWater Conservation On Drain Sizingruvina monteiroNo ratings yet
- Design For Green Roof IrrigationDocument7 pagesDesign For Green Roof IrrigationLuke augustusNo ratings yet
- An evaluation of scour measurement device performanceDocument13 pagesAn evaluation of scour measurement device performancexxxsimonNo ratings yet
- 10 11648 J Ajce S 2015030202 22Document5 pages10 11648 J Ajce S 2015030202 22NTQ VlogsNo ratings yet
- 68 - Cartalos Et Dupuis (1993)Document11 pages68 - Cartalos Et Dupuis (1993)Hicham HichamNo ratings yet
- Spe 177459 MsDocument22 pagesSpe 177459 MsHicham HichamNo ratings yet
- SPE 78716 Computational Fluid Dynamics (CFD) As A Tool To Study Cutting Transport in WellboresDocument4 pagesSPE 78716 Computational Fluid Dynamics (CFD) As A Tool To Study Cutting Transport in WellboresHicham HichamNo ratings yet
- Wall Effects On The Terminal Velocity of Spherical Particles in Newtonian and Non-Newtonian FluidsDocument9 pagesWall Effects On The Terminal Velocity of Spherical Particles in Newtonian and Non-Newtonian FluidsHicham HichamNo ratings yet
- 43 - Hemphill Et Al. (2008)Document7 pages43 - Hemphill Et Al. (2008)Hicham HichamNo ratings yet
- Concentric Annular Flow With Centerbody Rotation of A Newtonian and A Shear-Thinning LiquidDocument7 pagesConcentric Annular Flow With Centerbody Rotation of A Newtonian and A Shear-Thinning LiquidHicham HichamNo ratings yet
- Flow of Newtonian and Non Newtonian Fluids in Concentric and Eccentric AnnuliDocument26 pagesFlow of Newtonian and Non Newtonian Fluids in Concentric and Eccentric AnnuliHicham HichamNo ratings yet
- Helical Flow of Power-Law Fluids: Dostal, Zitnf, and J. SestakDocument4 pagesHelical Flow of Power-Law Fluids: Dostal, Zitnf, and J. SestakHicham HichamNo ratings yet
- Experimental and Computational Fluid Dynamics Study of Dense-Phase, Transition Region, and Dilute-Phase SpoutingDocument8 pagesExperimental and Computational Fluid Dynamics Study of Dense-Phase, Transition Region, and Dilute-Phase SpoutingHicham HichamNo ratings yet
- 78 - Kuru Et Al. (2000)Document7 pages78 - Kuru Et Al. (2000)Hicham HichamNo ratings yet
- Snyder Et Goldstein (1965)Document6 pagesSnyder Et Goldstein (1965)Hicham HichamNo ratings yet
- 2 - Fredrickson Et Bird (1958)Document6 pages2 - Fredrickson Et Bird (1958)Hicham HichamNo ratings yet
- Accurate SolutionDocument10 pagesAccurate SolutionHicham HichamNo ratings yet
- Flow of Newtonian and Non-Newtonian Fluids in An Eccentric Annulus With Rotation of The Inner CylinderDocument11 pagesFlow of Newtonian and Non-Newtonian Fluids in An Eccentric Annulus With Rotation of The Inner CylinderHicham HichamNo ratings yet
- Flow of Newtonian and Non-Newtonian Fluids in A Concentric Annuius With Rotation of The Inner CylinderDocument7 pagesFlow of Newtonian and Non-Newtonian Fluids in A Concentric Annuius With Rotation of The Inner CylinderHicham HichamNo ratings yet
- 35 - Wan (2000) PDFDocument11 pages35 - Wan (2000) PDFHicham HichamNo ratings yet
- 133 - Bilgesu Et Al. (2007) PDFDocument7 pages133 - Bilgesu Et Al. (2007) PDFHicham HichamNo ratings yet
- 2 - Fredrickson Et Bird (1958)Document6 pages2 - Fredrickson Et Bird (1958)Hicham HichamNo ratings yet
- 7 Redberger1962 PDFDocument4 pages7 Redberger1962 PDFHicham HichamNo ratings yet
- 8 - Vaughn (1965) PDFDocument4 pages8 - Vaughn (1965) PDFHicham HichamNo ratings yet
- Casing design for well drillingDocument44 pagesCasing design for well drillingChristian Olascoaga Mori50% (2)
- Spe 64646 MSDocument12 pagesSpe 64646 MSHicham HichamNo ratings yet
- Accurate SolutionDocument10 pagesAccurate SolutionHicham HichamNo ratings yet
- 8 - Vaughn (1965) PDFDocument4 pages8 - Vaughn (1965) PDFHicham HichamNo ratings yet
- Drill Pipe Rotation Effects On Non-Newtonian Fluids Flow in Eccen-Tric AnnuliDocument6 pagesDrill Pipe Rotation Effects On Non-Newtonian Fluids Flow in Eccen-Tric AnnuliHicham HichamNo ratings yet
- Cuttings TransportDocument10 pagesCuttings TransportHicham HichamNo ratings yet
- Accurate SolutionDocument10 pagesAccurate SolutionHicham HichamNo ratings yet
- Curriculum Vitae Replace With First Name(s) Surname(s)Document2 pagesCurriculum Vitae Replace With First Name(s) Surname(s)Valentina100% (1)
- How Compile or Interpret UDFDocument8 pagesHow Compile or Interpret UDFHicham HichamNo ratings yet
- Classical Fields 2Document2 pagesClassical Fields 2Jonathan SanchezNo ratings yet
- Summative Test For Quadratic Equations2Document2 pagesSummative Test For Quadratic Equations2AsmiraMangontra0% (1)
- 6 An Indian American Woman in Space 2Document11 pages6 An Indian American Woman in Space 2Manju YadavNo ratings yet
- Compare The Political System of Kazakhstan, USA, UK PresentationDocument19 pagesCompare The Political System of Kazakhstan, USA, UK PresentationAiganym OmiraliNo ratings yet
- Armv8-A Instruction Set ArchitectureDocument39 pagesArmv8-A Instruction Set ArchitectureraygarnerNo ratings yet
- Unit 2 Water Treatment Ce3303Document18 pagesUnit 2 Water Treatment Ce3303shivaNo ratings yet
- BOOK-Deva-Oracle MaterialDocument177 pagesBOOK-Deva-Oracle MaterialPAVANN TNo ratings yet
- KJR 20 880 PDFDocument14 pagesKJR 20 880 PDFNam LeNo ratings yet
- Theory and Practice of Crown and Bridge Prosthodontics 4nbsped CompressDocument1,076 pagesTheory and Practice of Crown and Bridge Prosthodontics 4nbsped CompressYuganya SriNo ratings yet
- AlternatorDocument3 pagesAlternatorVatsal PatelNo ratings yet
- 21st Century Literary GenresDocument2 pages21st Century Literary GenresGO2. Aldovino Princess G.No ratings yet
- HEC-HMS Tutorials and Guides-V3-20210529 - 140315Document756 pagesHEC-HMS Tutorials and Guides-V3-20210529 - 140315Ervin PumaNo ratings yet
- SMC Dialog Plus Conversion To Another SMC 8 - 22 - 2014Document15 pagesSMC Dialog Plus Conversion To Another SMC 8 - 22 - 2014vivek kumarNo ratings yet
- 2014 01 RappTrans - Weight Sensors ReportDocument51 pages2014 01 RappTrans - Weight Sensors Reportsuraj dhulannavarNo ratings yet
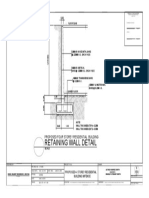
- Retaining Wall DetailsDocument1 pageRetaining Wall DetailsWilbert ReuyanNo ratings yet
- Thermal Physics A Lecture NotesDocument35 pagesThermal Physics A Lecture Notescarlo mtongiNo ratings yet
- FIL M 216 2nd Yer Panitikan NG PilipinasDocument10 pagesFIL M 216 2nd Yer Panitikan NG PilipinasJunas LopezNo ratings yet
- My Watch Runs WildDocument3 pagesMy Watch Runs WildLarissa SnozovaNo ratings yet
- The Joint Force Commander's Guide To Cyberspace Operations: by Brett T. WilliamsDocument8 pagesThe Joint Force Commander's Guide To Cyberspace Operations: by Brett T. Williamsأريزا لويسNo ratings yet
- Data DependDocument29 pagesData DependsheenaneesNo ratings yet
- Unit Rates and Cost Per ItemDocument213 pagesUnit Rates and Cost Per ItemDesiree Vera GrauelNo ratings yet
- Assessmentof Safety Cultureand Maturityin Mining Environments Caseof Njuli QuarryDocument12 pagesAssessmentof Safety Cultureand Maturityin Mining Environments Caseof Njuli QuarryAbdurrohman AabNo ratings yet
- Greek Myth WebquestDocument9 pagesGreek Myth Webquesthollyhock27No ratings yet
- Daftar Pustaka DaniDocument3 pagesDaftar Pustaka Danidokter linggauNo ratings yet
- High Speed Board Design: Signal Integrity AnalysisDocument35 pagesHigh Speed Board Design: Signal Integrity Analysissrikanth chundiNo ratings yet
- What Is Robotic Process Automation?: ERP SystemDocument5 pagesWhat Is Robotic Process Automation?: ERP SystemAna BoboceaNo ratings yet
- Atlas Ci30002Tier-PropanDocument3 pagesAtlas Ci30002Tier-PropanMarkus JeremiaNo ratings yet
- Osda Solar Module - Installation ManualDocument21 pagesOsda Solar Module - Installation ManualIOZEF1No ratings yet
- SocorexDocument6 pagesSocorexTedosNo ratings yet
- Bareos Manual Main ReferenceDocument491 pagesBareos Manual Main ReferenceAlejandro GonzalezNo ratings yet
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Machinery Lubrication Technician (MLT) I and II Certification Exam GuideFrom EverandMachinery Lubrication Technician (MLT) I and II Certification Exam GuideRating: 2 out of 5 stars2/5 (1)
- Biostratigraphic and Geological Significance of Planktonic ForaminiferaFrom EverandBiostratigraphic and Geological Significance of Planktonic ForaminiferaRating: 4 out of 5 stars4/5 (5)
- Gas-Liquid And Liquid-Liquid SeparatorsFrom EverandGas-Liquid And Liquid-Liquid SeparatorsRating: 3.5 out of 5 stars3.5/5 (3)
- Well Testing Project Management: Onshore and Offshore OperationsFrom EverandWell Testing Project Management: Onshore and Offshore OperationsNo ratings yet
- Heat Exchanger Equipment Field Manual: Common Operating Problems and Practical SolutionsFrom EverandHeat Exchanger Equipment Field Manual: Common Operating Problems and Practical SolutionsRating: 4 out of 5 stars4/5 (6)
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesFrom EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertRating: 3 out of 5 stars3/5 (2)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsFrom EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsNo ratings yet
- Internal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesFrom EverandInternal Combustion: How Corporations and Governments Addicted the World to Oil and Subverted the AlternativesRating: 4 out of 5 stars4/5 (2)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionFrom EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionRating: 4.5 out of 5 stars4.5/5 (16)
- A Practical Guide to Piping and Valves for the Oil and Gas IndustryFrom EverandA Practical Guide to Piping and Valves for the Oil and Gas IndustryRating: 5 out of 5 stars5/5 (3)
- Gas and Oil Reliability Engineering: Modeling and AnalysisFrom EverandGas and Oil Reliability Engineering: Modeling and AnalysisRating: 4.5 out of 5 stars4.5/5 (6)
- Advanced Production Decline Analysis and ApplicationFrom EverandAdvanced Production Decline Analysis and ApplicationRating: 3.5 out of 5 stars3.5/5 (4)
- Petroleum Production Engineering, A Computer-Assisted ApproachFrom EverandPetroleum Production Engineering, A Computer-Assisted ApproachRating: 4.5 out of 5 stars4.5/5 (11)
- Essentials of Coating, Painting, and Lining for the Oil, Gas and Petrochemical IndustriesFrom EverandEssentials of Coating, Painting, and Lining for the Oil, Gas and Petrochemical IndustriesRating: 5 out of 5 stars5/5 (5)