You might also like
- Seducing Women Manual - Dating Book For Men, Seduction, Attraction, Daygame & How To Talk To GirlsDocument121 pagesSeducing Women Manual - Dating Book For Men, Seduction, Attraction, Daygame & How To Talk To GirlsJoe Edwards0% (1)
- Application of Quality by Design Principles To The Drug Product Technology Transfer ProcessDocument35 pagesApplication of Quality by Design Principles To The Drug Product Technology Transfer Processv9991 v9991No ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- Physcie Q4 Week2Document53 pagesPhyscie Q4 Week2Lea Mae MimayNo ratings yet
- Lecture 03 - SKDocument17 pagesLecture 03 - SKMUHAMMAD RASHIDNo ratings yet
- Standard Test SignalsDocument11 pagesStandard Test SignalsSAJAL SRIVASTAVANo ratings yet
- Lecture 5 Time Domain Analysis of 1st Order SystemsDocument46 pagesLecture 5 Time Domain Analysis of 1st Order SystemsStieve NjorogeNo ratings yet
- Digital and Non-Linear Control: Time Domain AnalysisDocument87 pagesDigital and Non-Linear Control: Time Domain AnalysisAzim UcinNo ratings yet
- Lecture 3Document53 pagesLecture 3Mohammad JamiuNo ratings yet
- Lecture Transient Response AnalysisDocument42 pagesLecture Transient Response Analysis3re0oooNo ratings yet
- Linear Control Systems: Time Domain Analysis of 1 Order SystemsDocument55 pagesLinear Control Systems: Time Domain Analysis of 1 Order SystemsRIMSHA KHURSHIDNo ratings yet
- Lecture 12-13 Time Domain Analysis of 1st Order SystemsDocument56 pagesLecture 12-13 Time Domain Analysis of 1st Order SystemsKemal ZhafNo ratings yet
- Lecture 6-Time Domain Analysis of Control SystemsDocument144 pagesLecture 6-Time Domain Analysis of Control SystemsNoor AhmedNo ratings yet
- Time Domain Analysis PDFDocument86 pagesTime Domain Analysis PDF20BEE056 NEHA INDORIYANo ratings yet
- Lecture-5 Transient Response Analysis of Control SystemsDocument120 pagesLecture-5 Transient Response Analysis of Control SystemsIzhar Ahmed NoohpotoNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument146 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu SinghNo ratings yet
- Transient and Steady State Response Analysis 1Document113 pagesTransient and Steady State Response Analysis 1layike alemayehuNo ratings yet
- Lecture 8 - 9 - 10 - Time Domain AnalysisDocument132 pagesLecture 8 - 9 - 10 - Time Domain AnalysisSiraye AbirhamNo ratings yet
- Week 2Document90 pagesWeek 2Raising StarNo ratings yet
- Lecture 3: Transfer Function & Response: Process Dynamic & ControlDocument34 pagesLecture 3: Transfer Function & Response: Process Dynamic & Controlyussra amerNo ratings yet
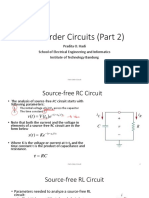
- 10 First-Order Circuits (Part 2) NotedDocument22 pages10 First-Order Circuits (Part 2) NotedBrandon CilNo ratings yet
- Electrical Engineering Engineering Control Systems Time Response of Feedback Control System NotesDocument43 pagesElectrical Engineering Engineering Control Systems Time Response of Feedback Control System NotesRishabh KhandelwalNo ratings yet
- Lecture 3Document52 pagesLecture 3mani shankarNo ratings yet
- Time Response Analysis of Control SystemsDocument5 pagesTime Response Analysis of Control SystemsAmyiel FloresNo ratings yet
- Time Response Analysis of Control SystemsDocument6 pagesTime Response Analysis of Control SystemsAnoop Kumar JairathNo ratings yet
- Network Analysis & Synthesis (NEC-301) Unit-I: X (T) X (T) X (T)Document9 pagesNetwork Analysis & Synthesis (NEC-301) Unit-I: X (T) X (T) X (T)Ravi Prakash YadavNo ratings yet
- Time-Domain Analysis of The Linear SystemsDocument32 pagesTime-Domain Analysis of The Linear SystemskamalNo ratings yet
- Lecture Time Domain Analysis of Control SystemsDocument15 pagesLecture Time Domain Analysis of Control SystemsFahadKhNo ratings yet
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocument27 pagesLecture-9 Time Domain Analysis of 1st Order Systemsusama asifNo ratings yet
- Time Response Analysis: Transient and Steady State Response, Standard Test Input Functions For Dynamic SystemsDocument13 pagesTime Response Analysis: Transient and Steady State Response, Standard Test Input Functions For Dynamic SystemsmumtazNo ratings yet
- Control Systems (CS)Document14 pagesControl Systems (CS)Suyash Dahake VlogsNo ratings yet
- 4 Transient Response 19 NovDocument90 pages4 Transient Response 19 NovheroNo ratings yet
- Time Domain Analysis of Control SystemDocument49 pagesTime Domain Analysis of Control Systemanasmos danielNo ratings yet
- TIME DOMAIN ANALYSIS Part-1Document67 pagesTIME DOMAIN ANALYSIS Part-1Mr. Amit Kumar SinghNo ratings yet
- I. Mathematical Models: Controller SensorDocument19 pagesI. Mathematical Models: Controller SensorKelvin KongNo ratings yet
- Communication Signals and System Design: K L UniversityDocument11 pagesCommunication Signals and System Design: K L UniversitykarthikNo ratings yet
- Chapter 4.1 Response Ist Order SystemsDocument35 pagesChapter 4.1 Response Ist Order SystemsShah AdnanNo ratings yet
- Introduction To Signal & SystemsDocument40 pagesIntroduction To Signal & Systemsusama tariq0% (1)
- CE - Unit 2 - Time Response of System and Time Domain SpecificationsDocument38 pagesCE - Unit 2 - Time Response of System and Time Domain SpecificationsP POORNA CHANDRA REDDYNo ratings yet
- Signals Systems PDFDocument93 pagesSignals Systems PDFrohithNo ratings yet
- Ch2 Modeling in Frequency DomainDocument66 pagesCh2 Modeling in Frequency DomainWei-Hsin CheinNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- 6 Time Response of 1st Order Systems LAPTOP A46LNE2Qs Conflicted Copy 2019-03-06Document35 pages6 Time Response of 1st Order Systems LAPTOP A46LNE2Qs Conflicted Copy 2019-03-06Eliel Basco100% (1)
- TCRDocument21 pagesTCRvishal9119No ratings yet
- Time Domain Analysis of Control SystemDocument25 pagesTime Domain Analysis of Control SystemEti'el Films / ኢትኤል ፊልሞችNo ratings yet
- C-Transient ResponseDocument17 pagesC-Transient ResponseAnanthan SrijithNo ratings yet
- CS1 - Chapter 2Document24 pagesCS1 - Chapter 2AnNo ratings yet
- Differential Equation & Transfer Function: Dinamika Sistem & SimulasiDocument39 pagesDifferential Equation & Transfer Function: Dinamika Sistem & SimulasiDesliana RamadoniNo ratings yet
- Signal-&-System NoteDocument31 pagesSignal-&-System NotePartha BanerjeeNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- C1Slide02 - Elementary SignalsDocument8 pagesC1Slide02 - Elementary Signalsfarhatul qistinaNo ratings yet
- Cs PPT - 1Document9 pagesCs PPT - 1EEE ACEECNo ratings yet
- ET-353, Lecture 25 (Sampling)Document39 pagesET-353, Lecture 25 (Sampling)Jahanzaib MushtaqNo ratings yet
- Pengolahan SinyalDocument19 pagesPengolahan Sinyalrafi zahranNo ratings yet
- FN CH 1Document52 pagesFN CH 1Md. Nurul AlamNo ratings yet
- C3 Signalspace2013 PDFDocument34 pagesC3 Signalspace2013 PDFthanhvinhegnNo ratings yet
- Distributions of Residence Times For Chemical ReactorsDocument52 pagesDistributions of Residence Times For Chemical ReactorsSasmilah KandsamyNo ratings yet
- Chapter 1 - v4Document29 pagesChapter 1 - v4方包No ratings yet
- Department of Electrical and Computer EngineeringDocument126 pagesDepartment of Electrical and Computer Engineeringkibrom atsbhaNo ratings yet
- Minggu 1-Klasifikasi SinyalDocument19 pagesMinggu 1-Klasifikasi SinyalImasAgustinSyarifNo ratings yet
- Electrical Signal and Syatem BeginnerDocument87 pagesElectrical Signal and Syatem Beginnerজীবন আহমেদNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Dunzo CasestudyDocument20 pagesDunzo Casestudyrprasannaa2002No ratings yet
- Customer Evolution Outside in Transformation Vol 6Document116 pagesCustomer Evolution Outside in Transformation Vol 6rprasannaa2002No ratings yet
- Bodily Ownership of Independent Supernumory LimbDocument11 pagesBodily Ownership of Independent Supernumory Limbrprasannaa2002No ratings yet
- EC8093 Unit 2Document10 pagesEC8093 Unit 2rprasannaa2002No ratings yet
- Reh All Unit MaterialDocument114 pagesReh All Unit Materialrprasannaa2002No ratings yet
- Daftar PustakaDocument5 pagesDaftar PustakarusniridwanNo ratings yet
- Ohp Week 8Document34 pagesOhp Week 8farah_natasha_5No ratings yet
- Python数据科学速查表 - KerasDocument1 pagePython数据科学速查表 - KerasKeith NgNo ratings yet
- Balance Chemical Equation - Online BalancerDocument2 pagesBalance Chemical Equation - Online BalancershoyebNo ratings yet
- Computer 9 - Learning Plan - WWLDocument7 pagesComputer 9 - Learning Plan - WWLMayflor CayetanoNo ratings yet
- East Asian ArtDocument4 pagesEast Asian ArtMenchie PaynorNo ratings yet
- 1625330538330Document3 pages1625330538330kossi abaloNo ratings yet
- Sample Informational Interview ChecklistDocument1 pageSample Informational Interview ChecklistPhạm TúUyênNo ratings yet
- Functions of Parts of An Animal CellDocument2 pagesFunctions of Parts of An Animal CellashuraqueenNo ratings yet
- Educ 103Document2 pagesEduc 103Nina RkiveNo ratings yet
- Book Report Project GuidelinesDocument2 pagesBook Report Project GuidelinesArmando Jose Medina MirandaNo ratings yet
- Pedagogical Practice in Teaching - Learning Mathematics in Secondary in School LevelDocument8 pagesPedagogical Practice in Teaching - Learning Mathematics in Secondary in School LevelapfgNo ratings yet
- Museum Design HandoutDocument1 pageMuseum Design HandoutSHERAZ BHATTINo ratings yet
- Angl 5Document24 pagesAngl 5Latika ChoudhuryNo ratings yet
- PHD Dissertation in English LiteratureDocument5 pagesPHD Dissertation in English LiteraturePaperWritersOnlineNorthLasVegas100% (1)
- Trees That Count West Coast Regional GuideDocument3 pagesTrees That Count West Coast Regional GuideJohn MurdochNo ratings yet
- Primer TC PDFDocument3 pagesPrimer TC PDFFrancois-No ratings yet
- Processes of Ideal GasesDocument20 pagesProcesses of Ideal Gasesemmarie llantinoNo ratings yet
- MRI Safety August 2009 V6Document11 pagesMRI Safety August 2009 V6Paulo Henrique Vizoná de OliveiraNo ratings yet
- Volumen 4Document7 pagesVolumen 4Willians MariscalNo ratings yet
- National Institute of Technology, DelhiDocument2 pagesNational Institute of Technology, DelhiAdhiraj choudharyNo ratings yet
- Processes 08 01485 v2Document17 pagesProcesses 08 01485 v2Aktiv RudarNo ratings yet
- MAT1175Document7 pagesMAT1175Naruto UwzumakiNo ratings yet
- AOL 2 Mod 4Document41 pagesAOL 2 Mod 4Canlas Aniel Jesper C.No ratings yet
- Lexicology Unit 8Document24 pagesLexicology Unit 8Business EnglishNo ratings yet
- Krauss, R., Hollier, D., Michelson, A., Foster, H., Kolbowski, S., Buskirk, M., & Buchloh, B. (1994) - The Reception of The Sixties. October, 69, 3.Document20 pagesKrauss, R., Hollier, D., Michelson, A., Foster, H., Kolbowski, S., Buskirk, M., & Buchloh, B. (1994) - The Reception of The Sixties. October, 69, 3.jkNo ratings yet
- Advisor Gold User ManualDocument5 pagesAdvisor Gold User Manualruizinho 1No ratings yet