You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- BPI Personal Loan Employee Program Application Form-REVISEDDocument2 pagesBPI Personal Loan Employee Program Application Form-REVISEDdexdex110% (1)
- Past Perfect Story 3 PDFDocument8 pagesPast Perfect Story 3 PDFRobin MillanNo ratings yet
- Composite Structures: Ching-Chieh Lin, Ya-Jung Lee, Chu-Sung HungDocument10 pagesComposite Structures: Ching-Chieh Lin, Ya-Jung Lee, Chu-Sung HunggemagdyNo ratings yet
- Aerodynamic Performance of Propellers 1245Document11 pagesAerodynamic Performance of Propellers 1245mikewenNo ratings yet
- Performance - Analysis - of - A - Small - Scale - Master Airscrew PropellerDocument10 pagesPerformance - Analysis - of - A - Small - Scale - Master Airscrew Propellerfelip987No ratings yet
- Articulo 3Document14 pagesArticulo 3Angel RodriguezNo ratings yet
- NotesDocument9 pagesNotesVishnu vardhanNo ratings yet
- The Prediction of Helicopter Rotor Hover Performance Using A Prescribed Wake AnalysisDocument56 pagesThe Prediction of Helicopter Rotor Hover Performance Using A Prescribed Wake AnalysiszmajchekNo ratings yet
- Numerical Simulation of Six Jet Pelton Turbine Model GRUPO 2Document9 pagesNumerical Simulation of Six Jet Pelton Turbine Model GRUPO 2Cristian Polo VallejosNo ratings yet
- Light Helicopter CalculationDocument9 pagesLight Helicopter Calculationshayant nandiNo ratings yet
- Aerodynamic Performance of A Hex-Rotor Unmanned Aerial Vehicle With Different Rotor SpacingDocument8 pagesAerodynamic Performance of A Hex-Rotor Unmanned Aerial Vehicle With Different Rotor SpacingjuanNo ratings yet
- Designing and FEM Simulation of The Helicopter Rotor and HubDocument11 pagesDesigning and FEM Simulation of The Helicopter Rotor and HubSidhartha Maurya100% (1)
- Xyd (Qjlqhhuv: "Design and Analysis of Helicopter Rotor Hub For Structural Loads"Document5 pagesXyd (Qjlqhhuv: "Design and Analysis of Helicopter Rotor Hub For Structural Loads"nagamahendraNo ratings yet
- Designing and FEM Simulation of The Helicopter Rotor and HubDocument11 pagesDesigning and FEM Simulation of The Helicopter Rotor and HubAlper DedeNo ratings yet
- Wind Tunnel Performance Tests of The Propellers WiDocument18 pagesWind Tunnel Performance Tests of The Propellers WitxcherbinhNo ratings yet
- Estimation of The Thrust Coefficient of A QuadcopterDocument8 pagesEstimation of The Thrust Coefficient of A QuadcopterElvor eskanNo ratings yet
- Full Attitude Control of An Efficient Quadrotor Tail-Sitter VTOL UAVDocument9 pagesFull Attitude Control of An Efficient Quadrotor Tail-Sitter VTOL UAVMUHAMMAD ABDULLAHNo ratings yet
- 2 - Propeller Thrust and Drag in Forward FlightDocument7 pages2 - Propeller Thrust and Drag in Forward FlightMarko PoloNo ratings yet
- Helicopter Main Rotor CorrecctDocument8 pagesHelicopter Main Rotor Correcctsaumya irugalbandaraNo ratings yet
- Influence of Propeller Configuration On Propulsion System Efficiency of Multi-Rotor Unmanned Aerial VehiclesDocument7 pagesInfluence of Propeller Configuration On Propulsion System Efficiency of Multi-Rotor Unmanned Aerial VehiclescareerNo ratings yet
- A Comparison of Helicopter Main Rotor PDFDocument18 pagesA Comparison of Helicopter Main Rotor PDFMirkoD.InterbartoloNo ratings yet
- Applmech 02 00009Document12 pagesApplmech 02 00009SubhasreeNo ratings yet
- 2021-Aerodynamic Analysis of Quadrotor UAV Propeller Using Computational Fluid DynamicDocument5 pages2021-Aerodynamic Analysis of Quadrotor UAV Propeller Using Computational Fluid DynamicJianbo JiangNo ratings yet
- He 4Document35 pagesHe 4Daxit LodaliyaNo ratings yet
- Blade Design and Performance Analysis of Wind TurbineDocument10 pagesBlade Design and Performance Analysis of Wind TurbineIJRASETPublicationsNo ratings yet
- Modification and Analysis of Twin Screw Ship SternDocument13 pagesModification and Analysis of Twin Screw Ship SternMaciej ReichelNo ratings yet
- Aerodynamic Characteristics of Rigid Coaxial Rotor by Wind Tunnel Test and Numerical CalculationDocument9 pagesAerodynamic Characteristics of Rigid Coaxial Rotor by Wind Tunnel Test and Numerical CalculationAngel RodriguezNo ratings yet
- Energies: Wind Turbine Blade Optimal Design Considering Multi-Parameters and Response Surface MethodDocument23 pagesEnergies: Wind Turbine Blade Optimal Design Considering Multi-Parameters and Response Surface MethodBOOPATHI YADAVNo ratings yet
- D Eng 21 0023 AeDocument13 pagesD Eng 21 0023 Aesaumya irugalbandaraNo ratings yet
- Performance and Design Investigation of Heavy Lift Tiltrotor With Aerodynamic Interference EffectsDocument19 pagesPerformance and Design Investigation of Heavy Lift Tiltrotor With Aerodynamic Interference EffectsJr Zdenko VukojaNo ratings yet
- Drones: Virtual Modelling and Testing of The Single and Ontra-Rotating Co-Axial PropellerDocument17 pagesDrones: Virtual Modelling and Testing of The Single and Ontra-Rotating Co-Axial PropellerUsamah Abd LatifNo ratings yet
- Adeyeye - 2021 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 801 - 012020Document9 pagesAdeyeye - 2021 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 801 - 012020Yomba BorisNo ratings yet
- Me-De-4060-7522-Suyog GawareDocument5 pagesMe-De-4060-7522-Suyog GawaresarfrajNo ratings yet
- Drones 06 00091 v2Document19 pagesDrones 06 00091 v2Mark7418No ratings yet
- Advanced Control Algorithms For Reduction of Wind Turbine 2015 Renewable enDocument14 pagesAdvanced Control Algorithms For Reduction of Wind Turbine 2015 Renewable enclaralisieNo ratings yet
- Xie 2020 IOP Conf. Ser. Mater. Sci. Eng. 772 012066Document7 pagesXie 2020 IOP Conf. Ser. Mater. Sci. Eng. 772 012066cain.s.timeNo ratings yet
- Electric Propulsion System Characterization Through ExperimentsDocument9 pagesElectric Propulsion System Characterization Through Experiments呂文祺No ratings yet
- Design and Implementation of Low Cost Thrust Benchmarking System (TBS) in Application For Small Scale Electric Uav Propeller CharacterizationDocument15 pagesDesign and Implementation of Low Cost Thrust Benchmarking System (TBS) in Application For Small Scale Electric Uav Propeller CharacterizationRhenetou VirginioNo ratings yet
- Jurnal Internasional Mekanika Fluida Renold Yanspri Pratama - 21410013Document8 pagesJurnal Internasional Mekanika Fluida Renold Yanspri Pratama - 21410013Renold Yanspri PratamaNo ratings yet
- Propeller Design Conf V1Document17 pagesPropeller Design Conf V1Fan SMGNo ratings yet
- Vibration Analysis On Frame and Propeller of Drone: July 2020Document11 pagesVibration Analysis On Frame and Propeller of Drone: July 2020Nam ĐỗNo ratings yet
- Characterization and Modeling of Brushless DC Motors and Electronic Speed Controllers With A DynamometerDocument19 pagesCharacterization and Modeling of Brushless DC Motors and Electronic Speed Controllers With A DynamometerOliver RailaNo ratings yet
- Technical Memorandum 104054: Langley ResearchDocument24 pagesTechnical Memorandum 104054: Langley ResearchVenugopal Muniraju MaragondahalliNo ratings yet
- 20170000654Document12 pages20170000654tizio caglioNo ratings yet
- Preliminary Design of A Small Unmanned Battery 3570581 - Peukert - VoltageDocument12 pagesPreliminary Design of A Small Unmanned Battery 3570581 - Peukert - Voltageumunera2997No ratings yet
- Performance of Horizontal Axis Tidal Current Turbine by Blade ConfigurationDocument12 pagesPerformance of Horizontal Axis Tidal Current Turbine by Blade ConfigurationAyman ZarefyNo ratings yet
- Hover Copter AnalysisDocument3 pagesHover Copter AnalysisGustavo Nárez Jr.No ratings yet
- Morphing Wing StructuresDocument7 pagesMorphing Wing StructuresManoj RamNo ratings yet
- Parametric Research and Optimization of Ducted Propeller Aerodynamic ConfigurationDocument10 pagesParametric Research and Optimization of Ducted Propeller Aerodynamic ConfigurationPrasad PatilNo ratings yet
- Power Estimation For Four Seater HelicopterDocument13 pagesPower Estimation For Four Seater Helicoptershayant nandiNo ratings yet
- Tarea 9 - Modelado y Experimentación 2007-01-3546 Development and Application of Buckling Estimation Method in Engine Connecting RodDocument7 pagesTarea 9 - Modelado y Experimentación 2007-01-3546 Development and Application of Buckling Estimation Method in Engine Connecting RodSantiago Sánchez MaldonadoNo ratings yet
- A Model For Yawing Dynamic Optimization of A Wind Turbine StructureDocument9 pagesA Model For Yawing Dynamic Optimization of A Wind Turbine StructureRevan TaeNo ratings yet
- White Paper o P 2014 Efficient PropellerDocument12 pagesWhite Paper o P 2014 Efficient PropellerdavalgonzalezNo ratings yet
- Research Article: Blade Design Optimisation For Fixed-Pitch Fixed-Speed Wind TurbinesDocument9 pagesResearch Article: Blade Design Optimisation For Fixed-Pitch Fixed-Speed Wind TurbinesBelaynehYitayewNo ratings yet
- Vibrationanalysisof PeltonDocument6 pagesVibrationanalysisof PeltonAditya DoyaleNo ratings yet
- Thesis Statement For Wind TurbinesDocument8 pagesThesis Statement For Wind Turbinesdw9x1bxb100% (1)
- Numerical Analysis of Helicopter Rotor at 400 RPM: March 2012Document7 pagesNumerical Analysis of Helicopter Rotor at 400 RPM: March 2012Leap AeronauticsNo ratings yet
- Comments 116449 1 18 20221205Document13 pagesComments 116449 1 18 20221205ai.with.hiNo ratings yet
- A Review of Mathematical Modelling Techniques For Advanced Rotorcraft ConfigurationsDocument74 pagesA Review of Mathematical Modelling Techniques For Advanced Rotorcraft ConfigurationsMert ANo ratings yet
- An Approach For Rational Design and Structural Analysis of A Hexa-CopterDocument12 pagesAn Approach For Rational Design and Structural Analysis of A Hexa-CopterTJPRC PublicationsNo ratings yet
- Star Delta Connection Information PDFDocument6 pagesStar Delta Connection Information PDFGiang BùiNo ratings yet
- Fyp-Obstacle Avoiding RobotDocument50 pagesFyp-Obstacle Avoiding RobotGiang BùiNo ratings yet
- Fre 700Document320 pagesFre 700Giang BùiNo ratings yet
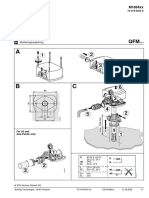
- Duct Sensor For Rel. Humidity - Temperature QFM.. - DaDocument1 pageDuct Sensor For Rel. Humidity - Temperature QFM.. - DaGiang BùiNo ratings yet
- Android Mobile Devices Based Automation System: Ahmet Aksoz, Ali SayginDocument7 pagesAndroid Mobile Devices Based Automation System: Ahmet Aksoz, Ali SayginGiang BùiNo ratings yet
- Simatic Net Telecontrol Telecontrol Server BasicDocument108 pagesSimatic Net Telecontrol Telecontrol Server BasicGiang BùiNo ratings yet
- Catalog Bien Tan Mitsubishi FR E700 InverterDocument104 pagesCatalog Bien Tan Mitsubishi FR E700 InverterGiang BùiNo ratings yet
- BA - TCS BASIC V3 - 76 Operating InstructionsDocument166 pagesBA - TCS BASIC V3 - 76 Operating InstructionsGiang BùiNo ratings yet
- MR J4 CatalogueDocument302 pagesMR J4 CatalogueGiang BùiNo ratings yet
- SINAMICS G120 PN at S7-1200 DOCU V1d4 enDocument62 pagesSINAMICS G120 PN at S7-1200 DOCU V1d4 enGiang BùiNo ratings yet
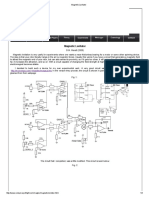
- Magnetic Levitator 1Document3 pagesMagnetic Levitator 1Giang BùiNo ratings yet
- PLC - 1 (CPU 1214C DC/DC/DC) : Totally Integrated Automation PortalDocument29 pagesPLC - 1 (CPU 1214C DC/DC/DC) : Totally Integrated Automation PortalGiang BùiNo ratings yet
- Us 20070170798Document17 pagesUs 20070170798Giang BùiNo ratings yet
- Ulster Bank Interview Questions and Answers 40548Document11 pagesUlster Bank Interview Questions and Answers 40548qwertyNo ratings yet
- Name of Employee: Position: Review Period: Bureau/Center/Service/DivisionDocument25 pagesName of Employee: Position: Review Period: Bureau/Center/Service/DivisionPAUL GONZALES90% (10)
- Mode of AppealsDocument7 pagesMode of AppealsJan Michael LorenzoNo ratings yet
- NRDC Report: Synergies in Swimming Pool EfficiencyDocument34 pagesNRDC Report: Synergies in Swimming Pool EfficiencyGreenSafePool100% (3)
- v16 - GE-1015 Jane's Aero Engine March 2000Document11 pagesv16 - GE-1015 Jane's Aero Engine March 2000Marcelo Roberti Rocha FantaguzziNo ratings yet
- Accounting Standard 34Document34 pagesAccounting Standard 34Kisi Ka Dar NahiNo ratings yet
- Gartner Reprint - Object Storageoct21Document20 pagesGartner Reprint - Object Storageoct21Wolf RichardNo ratings yet
- 2010 EarningsDocument144 pages2010 EarningsaroenNo ratings yet
- Pirst Page of Report (Abul Khair Tobacoo)Document14 pagesPirst Page of Report (Abul Khair Tobacoo)md.jewel ranaNo ratings yet
- Nelly Incident ReportDocument4 pagesNelly Incident Reportkristen_hinmanNo ratings yet
- 30313208-PD8100-2015 Smart Cities Overview British StandardDocument40 pages30313208-PD8100-2015 Smart Cities Overview British StandardDarlene GanubNo ratings yet
- A Background Debugging Mode Driver Package For Modular MicrocontrollersDocument16 pagesA Background Debugging Mode Driver Package For Modular MicrocontrollersNuc LeusNo ratings yet
- SOLAR AplicacionesDocument19 pagesSOLAR AplicacionesferminNo ratings yet
- GMPE Shallow Crustal EQ-paper (Sadigh Chang Egan 1997) PDFDocument10 pagesGMPE Shallow Crustal EQ-paper (Sadigh Chang Egan 1997) PDFZens Irving Huamani RodriguezNo ratings yet
- SPP - CondensedDocument83 pagesSPP - Condensedu9099 powNo ratings yet
- SZD Perkoz Flight Manual - 542.4.01 FM - Issue - II - April 2014 - Rev - 1-1 PDFDocument90 pagesSZD Perkoz Flight Manual - 542.4.01 FM - Issue - II - April 2014 - Rev - 1-1 PDFAndresLopezMllanNo ratings yet
- Brother InkJet DCP-MFC DCP6690CW MFC6490CW MFC6890CDW Parts and Service ManualDocument537 pagesBrother InkJet DCP-MFC DCP6690CW MFC6490CW MFC6890CDW Parts and Service ManuallftrevNo ratings yet
- Annex5-Declaration On Honour On Exclusion Criteria and Selection Criteria PDFDocument5 pagesAnnex5-Declaration On Honour On Exclusion Criteria and Selection Criteria PDFMAngels Colomer CugatNo ratings yet
- Function K1301 K1302 K1305A K1305B K1306 K06A K06B K06C K12A K12B K12CDocument2 pagesFunction K1301 K1302 K1305A K1305B K1306 K06A K06B K06C K12A K12B K12CValentino Budi PratamaNo ratings yet
- 6 Network and Systems Infrascture UpgradeDocument11 pages6 Network and Systems Infrascture Upgradeakram_alqadasiitNo ratings yet
- Traffic Jam Thesis StatementDocument4 pagesTraffic Jam Thesis Statementxnehytwff100% (1)
- Intelligent Systems Design and ApplicatiDocument1,134 pagesIntelligent Systems Design and Applicatirajmeet singhNo ratings yet
- mgn-581 Unit 5Document27 pagesmgn-581 Unit 5Ashish kumar ThapaNo ratings yet
- 12072022211703ASP - Mineral - Sept 2022Document4 pages12072022211703ASP - Mineral - Sept 2022Mahendra KumarNo ratings yet
- Social Media in The Workplace:: Issues and Strategic QuestionsDocument6 pagesSocial Media in The Workplace:: Issues and Strategic QuestionsCarolle LaoNo ratings yet
- Villavert vs. Employees ComissionDocument4 pagesVillavert vs. Employees ComissionCatherine DimailigNo ratings yet
- Ethanol Internal Combustion Engines: Ighlights P T SDocument6 pagesEthanol Internal Combustion Engines: Ighlights P T Syohannes kedirNo ratings yet
- Oop JavaDocument184 pagesOop Javastroud777No ratings yet