You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Simulation Model of A Military HEV With A Highly Redundant ArchitectureDocument10 pagesSimulation Model of A Military HEV With A Highly Redundant ArchitectureSekwah HawkesNo ratings yet
- Technology Selection and Sizing of On-Board Energy Recovery Systems To Reduce Fuel Consumption of Diesel-Electric Mine Haul TrucksDocument33 pagesTechnology Selection and Sizing of On-Board Energy Recovery Systems To Reduce Fuel Consumption of Diesel-Electric Mine Haul Trucksamir sadighiNo ratings yet
- Research On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesDocument12 pagesResearch On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesedumacerenNo ratings yet
- Prodotti 7 01703710Document9 pagesProdotti 7 01703710Julius RojoNo ratings yet
- An Optimized Electric Propulsion System For Hyperloop ApplicationsDocument11 pagesAn Optimized Electric Propulsion System For Hyperloop Applicationsreenrabi3342No ratings yet
- Power Management Strategy For Battery Electric Vehicles: Hedra Saleeb, Khairy Sayed, Ahmed Kassem, Ramadan MostafaDocument10 pagesPower Management Strategy For Battery Electric Vehicles: Hedra Saleeb, Khairy Sayed, Ahmed Kassem, Ramadan MostafaDana VerejanNo ratings yet
- Development of Electric Vehicle Powertrain: Experimental Implementation and Performance AssessmentDocument7 pagesDevelopment of Electric Vehicle Powertrain: Experimental Implementation and Performance AssessmentBaldau Pratap Singh BundelaNo ratings yet
- High-Torque Motor For A Gearless Electromechanical Actuator: F.R. Ismagilov V.E. Vavilov I.F. SayakhovDocument5 pagesHigh-Torque Motor For A Gearless Electromechanical Actuator: F.R. Ismagilov V.E. Vavilov I.F. SayakhovMano DanoNo ratings yet
- Analysis and Validation of A Real-Time AC Drive Simulator, 2004.Document10 pagesAnalysis and Validation of A Real-Time AC Drive Simulator, 2004.Ali H. NumanNo ratings yet
- Ahmed 2009Document5 pagesAhmed 2009moorpvrNo ratings yet
- Journal Jpe 15-5 1658292190Document12 pagesJournal Jpe 15-5 1658292190Nuri KaraoğlanNo ratings yet
- The Theory of The Development of An Electromagnetic Engine For Automotive UseDocument8 pagesThe Theory of The Development of An Electromagnetic Engine For Automotive UseAshish KumarNo ratings yet
- Energy Conversion and Management: Jaeyun Lee, Bumkyoo ChoiDocument7 pagesEnergy Conversion and Management: Jaeyun Lee, Bumkyoo ChoiTika YuliNo ratings yet
- 2010 01 1757 PDFDocument12 pages2010 01 1757 PDFSteven SullivanNo ratings yet
- Review of High Speed Electrical Machines in Gas Turbine Electrical Power GenerationDocument9 pagesReview of High Speed Electrical Machines in Gas Turbine Electrical Power GenerationicaanmpzNo ratings yet
- A Review On Multiphase Drives For Automotive Traction ApplicationsDocument20 pagesA Review On Multiphase Drives For Automotive Traction Applicationshamza mesaiNo ratings yet
- Starter Alternator MicroHybrid CarDocument7 pagesStarter Alternator MicroHybrid CartomNo ratings yet
- Improved Three Phase Single Phase Torque Cancellation IEEEAccess2021Document10 pagesImproved Three Phase Single Phase Torque Cancellation IEEEAccess2021DEBARATI DAMNo ratings yet
- Mechanical Engineering and SciencesDocument11 pagesMechanical Engineering and ScienceswarnoiseNo ratings yet
- Etasr 4935Document9 pagesEtasr 4935Maulik ShahNo ratings yet
- Hsiao 2005Document11 pagesHsiao 2005Le Huy HoangNo ratings yet
- 00 SRM Drives Alternative e TractionDocument4 pages00 SRM Drives Alternative e TractionSung Ryoung LimNo ratings yet
- Dynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsDocument7 pagesDynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsHitesh JoshiNo ratings yet
- Dynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsDocument7 pagesDynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsHitesh JoshiNo ratings yet
- Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives For EV and HEV ApplicationsDocument10 pagesComparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives For EV and HEV Applicationskhodabandelou100% (1)
- IMECE2005-80138: Development of Hydraulic-Electric Power Units For Mobile RobotsDocument8 pagesIMECE2005-80138: Development of Hydraulic-Electric Power Units For Mobile Robotsaerokeyan82No ratings yet
- Dynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced ConverterDocument11 pagesDynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced Convertershahin mirzaeiNo ratings yet
- Egenerative Shock Absorber For Hybrid Cars: C. M. Pramodh, S. R. ShankapalDocument8 pagesEgenerative Shock Absorber For Hybrid Cars: C. M. Pramodh, S. R. ShankapalArun GargNo ratings yet
- Thermal Analysis of GeneratorDocument11 pagesThermal Analysis of GeneratorhamidrezaNo ratings yet
- Converging Technologies For Electric Hybrid Vehicles and More Electric Aircraft SystemsDocument12 pagesConverging Technologies For Electric Hybrid Vehicles and More Electric Aircraft SystemsO GoogleNo ratings yet
- Partial Overview of Projects at Texas A&MDocument31 pagesPartial Overview of Projects at Texas A&MgdvngkrishnaNo ratings yet
- Clamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachDocument10 pagesClamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachHsan HaddarNo ratings yet
- A Comparative Study of Fuzzy Logic Controllers For Wind Turbine Based On PMSGDocument7 pagesA Comparative Study of Fuzzy Logic Controllers For Wind Turbine Based On PMSGHichem HamdiNo ratings yet
- 1 s2.0 S0960148108002280 MainDocument8 pages1 s2.0 S0960148108002280 MainMohamed AlNo ratings yet
- Impact of Electric Taxiing On Hybrid-Electric Aircraft SizingDocument10 pagesImpact of Electric Taxiing On Hybrid-Electric Aircraft SizingWilliam Jaldin CorralesNo ratings yet
- Expert Systems With Applications: Gwangmin Park, Seonghun Lee, Sungho Jin, Sangshin KwakDocument13 pagesExpert Systems With Applications: Gwangmin Park, Seonghun Lee, Sungho Jin, Sangshin KwakAbhishek Sharma (B18ME002)No ratings yet
- Permanent Magnet Synchronous Generator Wind Turbine ThesisDocument7 pagesPermanent Magnet Synchronous Generator Wind Turbine Thesisconnierippsiouxfalls100% (2)
- Electric Bikes Energy Management Game Theoretic Synthesis and ImplementationDocument6 pagesElectric Bikes Energy Management Game Theoretic Synthesis and ImplementationAves de Herveo - TolimaNo ratings yet
- Modeling and Control of Electric Hybrid Vehicles - 231108 - 121158Document7 pagesModeling and Control of Electric Hybrid Vehicles - 231108 - 121158Nay ThwayNo ratings yet
- Modeling and Control of Electromagnetic Brakes For Enhanced BrakiDocument7 pagesModeling and Control of Electromagnetic Brakes For Enhanced Brakijayaprakash2eswarnNo ratings yet
- Research Paper 3Document4 pagesResearch Paper 3Bipasha ChakrabortyNo ratings yet
- Modeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2Document5 pagesModeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2SureshNo ratings yet
- Investigation of Integrated Charging and Discharging Incorporating Interior Permanent Magnet Machine With Damper Bars For Electric VehiclesDocument10 pagesInvestigation of Integrated Charging and Discharging Incorporating Interior Permanent Magnet Machine With Damper Bars For Electric Vehiclespathfinder tamlukNo ratings yet
- Electromagnetic Design of SynchronousDocument6 pagesElectromagnetic Design of SynchronousedumacerenNo ratings yet
- The Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsDocument6 pagesThe Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsEdu Daryl MacerenNo ratings yet
- Permanent-Magnets Linear Actuators Applicability in Automobile Active SuspensionsDocument9 pagesPermanent-Magnets Linear Actuators Applicability in Automobile Active SuspensionsAndré Ferraz de SouzaNo ratings yet
- Considerations On The Development of An Electric Drive For A Secondary Flight Control Electromechanical ActuatorDocument11 pagesConsiderations On The Development of An Electric Drive For A Secondary Flight Control Electromechanical Actuatormaro.sramekNo ratings yet
- PM BLDC RatingsDocument7 pagesPM BLDC RatingsBHARDA KUNJNo ratings yet
- Fan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEDocument13 pagesFan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEMarcelo Vinicius de PaulaNo ratings yet
- B4e2 PDFDocument13 pagesB4e2 PDFعلي كامل الاسديNo ratings yet
- RPG 2019 0157 FinalDocument13 pagesRPG 2019 0157 Finalقطائف العواطفNo ratings yet
- 1.2 Introduction of Electrical Machines, Drive Systems, and Their Applications 5Document16 pages1.2 Introduction of Electrical Machines, Drive Systems, and Their Applications 5gurunathan14No ratings yet
- DTC With Fuzzy Logic For Multi-Machine Systems TraDocument15 pagesDTC With Fuzzy Logic For Multi-Machine Systems Trasuntchou julesNo ratings yet
- Preliminary Analysis On Fuel Cell Power Plant Design For Racing VehiclesDocument7 pagesPreliminary Analysis On Fuel Cell Power Plant Design For Racing VehiclesneirillapjNo ratings yet
- Finken - Comparison Machines For Hybrid Vehicles PDFDocument5 pagesFinken - Comparison Machines For Hybrid Vehicles PDFOctavian MardaraseviciNo ratings yet
- On The Energy Optimized Control of Standard and High-Efficiency Induction Motors in CT and HVAC ApplicationsDocument10 pagesOn The Energy Optimized Control of Standard and High-Efficiency Induction Motors in CT and HVAC ApplicationsKise RyotaNo ratings yet
- Modeling and Analysis of Electric Motors State of The Art ReviewDocument18 pagesModeling and Analysis of Electric Motors State of The Art Reviewpradeep shindeNo ratings yet
- Regenerative Braking Modeling, Control, and Simulation of A Hybrid Energy Storage System For An Electric Vehicle in Extreme ConditionsDocument15 pagesRegenerative Braking Modeling, Control, and Simulation of A Hybrid Energy Storage System For An Electric Vehicle in Extreme ConditionsBouchendouka LiliaNo ratings yet
- A Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsDocument13 pagesA Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsNouman AhmadNo ratings yet
- Developing A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineDocument6 pagesDeveloping A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineaugustoNo ratings yet
- Design Optimization of Axial Flux Permanent Magnet Synchronous Machine Using 3d FEMDocument15 pagesDesign Optimization of Axial Flux Permanent Magnet Synchronous Machine Using 3d FEMaugustoNo ratings yet
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature Machineantriksh mahajanNo ratings yet
- Developing A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineDocument6 pagesDeveloping A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineaugustoNo ratings yet
- Tda 8944Document21 pagesTda 8944Ignacio Alonso Correa PinoNo ratings yet
- SMD PackagesDocument5 pagesSMD Packagesamreshjha22No ratings yet
- RT9602Document8 pagesRT9602ragav1234No ratings yet
- Scheme of Work 2010Document22 pagesScheme of Work 2010Sivabalan BionicNo ratings yet
- KWZ 4s.englDocument4 pagesKWZ 4s.englthanh_cdt01No ratings yet
- Nonlinear P-I Controller Design For Switchmode Dc-To-Dc Power ConvertersDocument8 pagesNonlinear P-I Controller Design For Switchmode Dc-To-Dc Power ConvertersDipanjan DasNo ratings yet
- S 2 7F NF 2.7G 2way SplitterDocument2 pagesS 2 7F NF 2.7G 2way SplitterRonald Garcia100% (1)
- Aircraft & Engine - Technical GeneralDocument16 pagesAircraft & Engine - Technical GeneralprachatNo ratings yet
- Raco 257Document1 pageRaco 257Jimmy McynsNo ratings yet
- Gmaw STTDocument4 pagesGmaw STTAnonymous 0rt9KWmNNo ratings yet
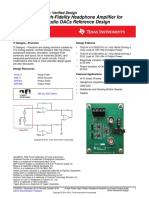
- A High Power Headphone Amplifier Reference DesignDocument41 pagesA High Power Headphone Amplifier Reference DesignGERRY LNo ratings yet
- Lab 2Document3 pagesLab 2Vu LeNo ratings yet
- ZMD310AT - Tehnički PodaciDocument6 pagesZMD310AT - Tehnički Podaciroadkill7No ratings yet
- TH Solutions TransReso April 2020Document2 pagesTH Solutions TransReso April 2020Alexander SolivenNo ratings yet
- Kx15dtam PDFDocument2 pagesKx15dtam PDFTato FloresNo ratings yet
- First-Order Circuits (7.1-7.2) : Dr. Holbert April 12, 2006Document26 pagesFirst-Order Circuits (7.1-7.2) : Dr. Holbert April 12, 20060307aliNo ratings yet
- Ner SpecificationDocument2 pagesNer SpecificationpussykhanNo ratings yet
- Features Description: LTC4315 2-Wire Bus Buffer With High Noise MarginDocument20 pagesFeatures Description: LTC4315 2-Wire Bus Buffer With High Noise MarginMoritery miraNo ratings yet
- Electric Machine - II (2014-15)Document4 pagesElectric Machine - II (2014-15)subhadip ghoshNo ratings yet
- ETL Listed Class 2 Power Supply: 12 V Power Supply With Charging Regulator and 7 Ah Sealed Rechargeable BatteryDocument2 pagesETL Listed Class 2 Power Supply: 12 V Power Supply With Charging Regulator and 7 Ah Sealed Rechargeable BatteryCarlos ArriazaNo ratings yet
- ATO SG Series Servo Driver User ManualDocument48 pagesATO SG Series Servo Driver User ManualiangarvinsNo ratings yet
- DatasheetDocument10 pagesDatasheetJose SalgueroNo ratings yet
- S.O. Pillai - Solid State Physics-New Age International (P) LTD., Publishers (2005)Document848 pagesS.O. Pillai - Solid State Physics-New Age International (P) LTD., Publishers (2005)Gsudhrvrid100% (3)
- Kappa 15LFADocument2 pagesKappa 15LFAGustavo VainsteinNo ratings yet
- Detection of Power Grid Synchronization Failure On Sensing Frequency and Voltage Beyond Acceptable RangeDocument6 pagesDetection of Power Grid Synchronization Failure On Sensing Frequency and Voltage Beyond Acceptable RangeHari PrasadNo ratings yet
- Sect 9 Charging System 1fs Ce303Document13 pagesSect 9 Charging System 1fs Ce303laura MtNo ratings yet
- TitanServiceManual PDFDocument116 pagesTitanServiceManual PDFOmar del CastilloNo ratings yet
- Metoda Pengujian GeneratorDocument52 pagesMetoda Pengujian Generatorsarwant_wantNo ratings yet
- CSS (Week 4)Document2 pagesCSS (Week 4)JasmineNo ratings yet
- 8-OPTICS-01 - TheoryDocument23 pages8-OPTICS-01 - TheoryRaju SinghNo ratings yet