You might also like
- Body Builders Guide PDFDocument216 pagesBody Builders Guide PDFvo phuongNo ratings yet
- 1990 Volvo 740 Wiring DiagramsDocument14 pages1990 Volvo 740 Wiring DiagramsDavid Cooley67% (3)
- 7) Progress PaymentDocument5 pages7) Progress Paymentkerwin jayNo ratings yet
- TechRef 3-W-Transformer 3phaseDocument40 pagesTechRef 3-W-Transformer 3phaseTorrez JeanNo ratings yet
- DVC RpuDocument28 pagesDVC RpupujFierros100% (1)
- Accenture Managed Services Future Process Led TransformationDocument12 pagesAccenture Managed Services Future Process Led TransformationYusuf KusumaNo ratings yet
- 9.1.2021 - Trajectory - Anomaly - Detection DatedDocument5 pages9.1.2021 - Trajectory - Anomaly - Detection Dateddeepak sureshNo ratings yet
- Conference PaperDocument4 pagesConference PaperHelenaNo ratings yet
- A Novel Methodology To Monitor Passenger Mobility Performance in Urban Subway StationsDocument18 pagesA Novel Methodology To Monitor Passenger Mobility Performance in Urban Subway StationsCao Giang NamNo ratings yet
- Leran How Aotomotive Susteme BuildDocument17 pagesLeran How Aotomotive Susteme BuildeeeeeeeNo ratings yet
- Mahajan Et Al 2020 Prediction of Lane Changing Maneuvers With Automatic Labeling and Deep LearningDocument12 pagesMahajan Et Al 2020 Prediction of Lane Changing Maneuvers With Automatic Labeling and Deep Learningkevin.k.xuNo ratings yet
- Multiple Lanes Identification For Advanced Driver Assistance System (ADAS)Document6 pagesMultiple Lanes Identification For Advanced Driver Assistance System (ADAS)suvarnashirkeNo ratings yet
- A Sensor-Fusion Drivable-Region and Lane-Detection System For Autonomous Vehicle Navigation in Challenging Road ScenariosDocument15 pagesA Sensor-Fusion Drivable-Region and Lane-Detection System For Autonomous Vehicle Navigation in Challenging Road ScenariosnaveenNo ratings yet
- Ijiset V3 I9 11 PDFDocument2 pagesIjiset V3 I9 11 PDFAnjang NugrohoNo ratings yet
- 1 s2.0 S0957417423014720 MainDocument15 pages1 s2.0 S0957417423014720 MainAngel David Cano RendonNo ratings yet
- Complete Panoptic Traffic Recognition System With Ensemble of YOLO Family ModelsDocument9 pagesComplete Panoptic Traffic Recognition System With Ensemble of YOLO Family ModelsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unsupervised Obstacle Detection in DriviDocument15 pagesUnsupervised Obstacle Detection in DriviSiddhant SheteNo ratings yet
- Alert SystemDocument7 pagesAlert SystemBalasaheb Bhausaheb Jadhav -No ratings yet
- Paper Transito PDFDocument9 pagesPaper Transito PDFyerson calderonNo ratings yet
- Modelling of Roundabout & Signalized Roundabout Using Simulation SoftwareDocument20 pagesModelling of Roundabout & Signalized Roundabout Using Simulation SoftwareVaibhav JainNo ratings yet
- Methods of ResearchDocument17 pagesMethods of ResearchRALPH BRENZ AGOTNo ratings yet
- Real Time InfringeDocument5 pagesReal Time InfringeThuThao NguyenNo ratings yet
- 2017 An Incremental Framework For Video-Based Traffic Sign Detection Tracking and RecognitionDocument12 pages2017 An Incremental Framework For Video-Based Traffic Sign Detection Tracking and RecognitionFilip Antonio PavlinićNo ratings yet
- JOIE Volume 11 Issue 2 Pages 77-87Document11 pagesJOIE Volume 11 Issue 2 Pages 77-87MalloxNo ratings yet
- A Model For Detecting Movement in Railway Infrastructure Using Deep Convolutional Neural NetworkDocument11 pagesA Model For Detecting Movement in Railway Infrastructure Using Deep Convolutional Neural NetworkCentral Asian StudiesNo ratings yet
- LANE Detection - 2Document15 pagesLANE Detection - 2Getz23No ratings yet
- Transportation Research Part C: Sohail Zangenehpour, Luis F. Miranda-Moreno, Nicolas SaunierDocument16 pagesTransportation Research Part C: Sohail Zangenehpour, Luis F. Miranda-Moreno, Nicolas SaunierJulio CésarNo ratings yet
- Lane - NIT-1Document11 pagesLane - NIT-1narendra29000No ratings yet
- TripVista - Triple Perspective Visual Trajectory Analytics and Its Application On Microscopic Traffic Data at A Road IntersectionDocument8 pagesTripVista - Triple Perspective Visual Trajectory Analytics and Its Application On Microscopic Traffic Data at A Road IntersectionJim C. ValenciaNo ratings yet
- Jih MSP 2012 03 005Document15 pagesJih MSP 2012 03 005DivyaSejekanNo ratings yet
- 1 s2.0 S0952197619300089 MainDocument16 pages1 s2.0 S0952197619300089 Main100NadaNo ratings yet
- Vehicle Detection For Accident PreventionDocument7 pagesVehicle Detection For Accident PreventionIJRASETPublicationsNo ratings yet
- Smart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFDocument4 pagesSmart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Optimized Hybrid Transformer-Based Technique For Real-Time Pedestrian Intention Estimation in Autonomous VehiclesDocument6 pagesAn Optimized Hybrid Transformer-Based Technique For Real-Time Pedestrian Intention Estimation in Autonomous Vehicleskarimelkasas99No ratings yet
- Cognitive FrameworkDocument17 pagesCognitive FrameworkHEPZIBAH J CSE-PG2020No ratings yet
- Analysis of Pedestrian Vehicle Interactions and Delay PDFDocument5 pagesAnalysis of Pedestrian Vehicle Interactions and Delay PDFvalNo ratings yet
- Traffic Sign Detection in Weather Conditions: Agothi Vaibhav Anjani KumarDocument3 pagesTraffic Sign Detection in Weather Conditions: Agothi Vaibhav Anjani KumarR.abhinava sarath chandraNo ratings yet
- Sensors 23 00789Document21 pagesSensors 23 00789varbash1419No ratings yet
- A Review On Iot Based Energy Monitoring and Controlling SystemDocument4 pagesA Review On Iot Based Energy Monitoring and Controlling SystemIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet
- Robust Lane Detection From Continuous Driving Scenes Using Deep Neural NetworksDocument15 pagesRobust Lane Detection From Continuous Driving Scenes Using Deep Neural NetworksJörg ChamorroNo ratings yet
- Research of Lane Detection Method Based On Attention MechanismDocument7 pagesResearch of Lane Detection Method Based On Attention MechanismkandarpNo ratings yet
- IOT TrackDocument7 pagesIOT TrackShantanu SinghNo ratings yet
- Mathematics 09 00660 v2Document37 pagesMathematics 09 00660 v2christophe leprinceNo ratings yet
- 2019 ReviewOfLane-ChangingManeuversDocument11 pages2019 ReviewOfLane-ChangingManeuversJasNo ratings yet
- An Intelligent Multiple Vehicle Detection and Tracking Using Modified Vibe Algorithm and Deep Learning AlgorithmDocument13 pagesAn Intelligent Multiple Vehicle Detection and Tracking Using Modified Vibe Algorithm and Deep Learning AlgorithmChouaib SaciNo ratings yet
- Sustainability 15 06943Document18 pagesSustainability 15 06943maniesha1438No ratings yet
- Lane Detection Algorithm Based On Temporal-SpatialDocument27 pagesLane Detection Algorithm Based On Temporal-SpatialSabari Selvam BNo ratings yet
- Lane Detection Using Deep Learning Antriksh GuptaDocument5 pagesLane Detection Using Deep Learning Antriksh Guptaantriksh mahajanNo ratings yet
- Sensors 21 03452 v3Document30 pagesSensors 21 03452 v3Sohini RoyNo ratings yet
- Ijgi 13 00073Document29 pagesIjgi 13 00073bernardohsNo ratings yet
- Vehicle Vibration Signal Processing For Road Surface MonitoringDocument6 pagesVehicle Vibration Signal Processing For Road Surface MonitoringNurmukhammad AbdukarimovNo ratings yet
- Paper 8871Document6 pagesPaper 8871IJARSCT JournalNo ratings yet
- Blind-Spot Vehicle Detection Using Motion and Static FeatureDocument6 pagesBlind-Spot Vehicle Detection Using Motion and Static FeatureDivine Grace BurmalNo ratings yet
- ACM1Document7 pagesACM1Ricky LayderosNo ratings yet
- Application of Image Processing Techniques For Autonomous CarsDocument12 pagesApplication of Image Processing Techniques For Autonomous CarsludwigNo ratings yet
- Railway Security System Based On Wireless Sensor Networks: State of The ArtDocument4 pagesRailway Security System Based On Wireless Sensor Networks: State of The ArtSunny LeoneNo ratings yet
- Computer Vision Techniques For Traffic Flow ComputDocument11 pagesComputer Vision Techniques For Traffic Flow Computharrouche riadhNo ratings yet
- Intelligent Traffic-Monitoring System Based On YOLO and Convolutional Fuzzy Neural NetworksDocument14 pagesIntelligent Traffic-Monitoring System Based On YOLO and Convolutional Fuzzy Neural Networksahammedijas2209118No ratings yet
- Shreyas, Detect Pothole PaperDocument5 pagesShreyas, Detect Pothole PaperPrashanth SNo ratings yet
- Presentation Review of ML in Sound Anoomally DetectionDocument15 pagesPresentation Review of ML in Sound Anoomally DetectionAdebisi RichardNo ratings yet
- Edi (DT) (2) Final3Document8 pagesEdi (DT) (2) Final3Shlok AgarwalNo ratings yet
- A Real-Time Vision System For Nighttime Vehicle Detection and Traffic SurveillanceDocument15 pagesA Real-Time Vision System For Nighttime Vehicle Detection and Traffic SurveillancepritamNo ratings yet
- Railway Track Monitoring ProposalDocument7 pagesRailway Track Monitoring ProposalGayuNo ratings yet
- Advanced Driver Assistance SystemDocument5 pagesAdvanced Driver Assistance SystemIJRASETPublicationsNo ratings yet
- 13530-Article Text-24228-1-10-20230328Document10 pages13530-Article Text-24228-1-10-20230328Steve Ristian LukardieNo ratings yet
- Project UPS - PDF P04234Document44 pagesProject UPS - PDF P04234Tareq AzizNo ratings yet
- Byjusbusinesscanvasmodel 190201155441Document5 pagesByjusbusinesscanvasmodel 190201155441Aarsh SoniNo ratings yet
- Could Not Connect Unable To Find Driver Net - Sourceforge.jtds - Jdbc.driverDocument3 pagesCould Not Connect Unable To Find Driver Net - Sourceforge.jtds - Jdbc.driverEze Alexander IkNo ratings yet
- A5 EXPERIMENT LVDT and RVDTDocument14 pagesA5 EXPERIMENT LVDT and RVDTDuminduJayakodyNo ratings yet
- UZZ32 Suspension Codes PDFDocument32 pagesUZZ32 Suspension Codes PDFAdel Sta MariaNo ratings yet
- 3G 7.2Mbps 3G Connect Modem User Guide: Welcome To Hspa Usb Modem 3G CONNECT MODEM Provides The Following FunctionsDocument21 pages3G 7.2Mbps 3G Connect Modem User Guide: Welcome To Hspa Usb Modem 3G CONNECT MODEM Provides The Following FunctionsBarce RumkabuNo ratings yet
- Online CommunicationDocument14 pagesOnline CommunicationClarin FleminNo ratings yet
- Concrete Business in A BOXDocument35 pagesConcrete Business in A BOXDessalegn GaminiNo ratings yet
- Marykoski Resume 1Document2 pagesMarykoski Resume 1api-269561075No ratings yet
- Satyam Eye Hospital - Google SearchDocument1 pageSatyam Eye Hospital - Google SearchRajeshwar GargeNo ratings yet
- Unit-4 Hadoop Distributed File System (HDFS) : SyllabusDocument17 pagesUnit-4 Hadoop Distributed File System (HDFS) : SyllabusFrost RebbecaNo ratings yet
- Procurement Monitoring Report JuneDocument2 pagesProcurement Monitoring Report JuneKaJong JaclaNo ratings yet
- ICR 225 Factsheet Steve 6RDocument2 pagesICR 225 Factsheet Steve 6RRizwan MNo ratings yet
- Proteza Oticon More Minirite R Instructions For UseDocument49 pagesProteza Oticon More Minirite R Instructions For UseOvidiu PascuNo ratings yet
- MTL 7700 SeriesDocument17 pagesMTL 7700 Seriescuongphan123No ratings yet
- ISO 817 2014 Amd 2 2021Document10 pagesISO 817 2014 Amd 2 2021EdwinMedinaBejaranoNo ratings yet
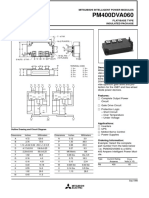
- PM400DVA060: Mitsubishi Intelligent Power ModulesDocument6 pagesPM400DVA060: Mitsubishi Intelligent Power ModulesDiego GrisalesNo ratings yet
- Paper Arduino Based Gas Detection Using SensorsDocument6 pagesPaper Arduino Based Gas Detection Using SensorsAbhishek MishraNo ratings yet
- Priti Kadam Dte ProjectDocument15 pagesPriti Kadam Dte ProjectAk MarathiNo ratings yet
- Agnes CVDocument3 pagesAgnes CVMaziwa ProNo ratings yet
- 38smss4 Specification For Coupling Capacitor Voltage Transformer and or Carrier Coupler CapacitorDocument20 pages38smss4 Specification For Coupling Capacitor Voltage Transformer and or Carrier Coupler CapacitorengrandyNo ratings yet
- Hydronic 300 Valve Setting Instructions - M04002enDocument14 pagesHydronic 300 Valve Setting Instructions - M04002enbdgnsNo ratings yet
- CIS Written ReportDocument3 pagesCIS Written ReportNiia LeonesNo ratings yet
- Assignment On LifiDocument19 pagesAssignment On LifiMushir BakshNo ratings yet