You might also like
- Item:130ST Series Servo Motor: SpecificationsDocument4 pagesItem:130ST Series Servo Motor: Specificationsn13t0314No ratings yet
- KEB COMBIVERT F5 Instruction ManualDocument12 pagesKEB COMBIVERT F5 Instruction ManualWagner MenezesNo ratings yet
- Processor 521x User Manual: Messung Systems NEXGEN - 5000Document54 pagesProcessor 521x User Manual: Messung Systems NEXGEN - 5000arunkumarNo ratings yet
- SANMOTION R Series High Performance AC Servo SystemsDocument172 pagesSANMOTION R Series High Performance AC Servo SystemsM.D. Niyaz100% (2)
- Settings for DC-03 drive and 1.5kW spindle under Mach3Document3 pagesSettings for DC-03 drive and 1.5kW spindle under Mach3Edy PutrantoNo ratings yet
- E21S Operation Manual V1.06Document21 pagesE21S Operation Manual V1.06Adalberto De LeonNo ratings yet
- Service Manual: PPP PP PDocument194 pagesService Manual: PPP PP Prd6iNo ratings yet
- Hi-Scan Pro - PPTDocument26 pagesHi-Scan Pro - PPTklashincoviskyNo ratings yet
- ATMEGA8 Temparature ControllerDocument24 pagesATMEGA8 Temparature ControllerjesudhasNo ratings yet
- Indramat Digital Drive Diagnostics: Distance Homing Switch-Reference Mark Error (S-298-9)Document1 pageIndramat Digital Drive Diagnostics: Distance Homing Switch-Reference Mark Error (S-298-9)Muhammad FajriNo ratings yet
- Sharp Cms r500cdx CP r500Document40 pagesSharp Cms r500cdx CP r500anibal100% (1)
- Xc6slx16 Sdram-User ManualDocument13 pagesXc6slx16 Sdram-User Manualjeni1086No ratings yet
- Mitsubishi Melservo MR JEDocument346 pagesMitsubishi Melservo MR JEpankaj mankar100% (1)
- JHD629 204aDocument22 pagesJHD629 204apiyushpandeyNo ratings yet
- Ao-90265ba Pci CardDocument46 pagesAo-90265ba Pci CardFrancisco Javier PérezNo ratings yet
- Pizzato LimitDocument14 pagesPizzato Limitjps.forsaljningNo ratings yet
- Understanding Crossed Roller Bearing Identification NumbersDocument16 pagesUnderstanding Crossed Roller Bearing Identification NumbersSandhya SankarNo ratings yet
- J4 Alarm ListDocument174 pagesJ4 Alarm ListElvira Nisa SNo ratings yet
- User Manual Io en v2Document15 pagesUser Manual Io en v2bhlebarovNo ratings yet
- User Manual For SA Series: Smart & AccurateDocument133 pagesUser Manual For SA Series: Smart & AccurateJean GrimNo ratings yet
- HAL401 Linear Hall Effect Sensor IC (DSH000018002EN)Document20 pagesHAL401 Linear Hall Effect Sensor IC (DSH000018002EN)MaxNo ratings yet
- Dell - Xps - l501x - l502x - DAGM6BMB8F0 Quanta - gm6b - Rev - 1a - SCH PDFDocument56 pagesDell - Xps - l501x - l502x - DAGM6BMB8F0 Quanta - gm6b - Rev - 1a - SCH PDFDevender kumar100% (1)
- PTS Reference Manual V2.2Document265 pagesPTS Reference Manual V2.2patlan2000100% (3)
- Cebora PDFDocument36 pagesCebora PDFLuis Miguel LimaNo ratings yet
- User Manual (SZGH-X Series) V1.5-UDocument58 pagesUser Manual (SZGH-X Series) V1.5-UDmytroKrNo ratings yet
- Elau SX-1 Servo DriveDocument170 pagesElau SX-1 Servo Driveanon_6032832230% (1)
- LC Grafico 128X64 PDFDocument19 pagesLC Grafico 128X64 PDFAntonio ManuelNo ratings yet
- DI-166 Service Manual v1.18Document31 pagesDI-166 Service Manual v1.18Juan Cristóbal CarvalloNo ratings yet
- PI3070i-N 7-inch HMI with Linux OSDocument1 pagePI3070i-N 7-inch HMI with Linux OSMiguel LunaNo ratings yet
- Brymen PC Interface Schematic 3rd PartyDocument6 pagesBrymen PC Interface Schematic 3rd PartyCostinSîrgheiNo ratings yet
- Max 4 Max 41103016080000 13130251 002 Elau ManualDocument22 pagesMax 4 Max 41103016080000 13130251 002 Elau ManualLyes TAGGUEBNo ratings yet
- Rexroth SYNAX 200: Troubleshooting GuideDocument112 pagesRexroth SYNAX 200: Troubleshooting GuideKauê Vinicius100% (1)
- GCM02 GB App R03Document37 pagesGCM02 GB App R03Karim AssoumaniNo ratings yet
- XM Gtx6040 Sony SchematicsDocument22 pagesXM Gtx6040 Sony SchematicsPaulo DinisNo ratings yet
- Manual Sharp CMS-R600XDocument64 pagesManual Sharp CMS-R600Xjca16100% (1)
- XENON Block DiagramsDocument36 pagesXENON Block DiagramsFIVE MEDIA SOCIALNo ratings yet
- Ac Servo Delta Asda-Ab - Manual - en - 20141106 PDFDocument343 pagesAc Servo Delta Asda-Ab - Manual - en - 20141106 PDFNguyễn Hồng PhướcNo ratings yet
- Weighing Indicator A19 User ManualDocument16 pagesWeighing Indicator A19 User Manualmtrserv gmail.comNo ratings yet
- ATV32 Programming Manual EN S1A28692 03 PDFDocument339 pagesATV32 Programming Manual EN S1A28692 03 PDFМиланNo ratings yet
- PRONET User Manual V1Document88 pagesPRONET User Manual V1Tülay Mutlu100% (1)
- Testing Flybacks and Yokes With The RINGER TestDocument4 pagesTesting Flybacks and Yokes With The RINGER TestS a y oNo ratings yet
- Sensorless ACIM Field-Oriented Control: Design Reference ManualDocument40 pagesSensorless ACIM Field-Oriented Control: Design Reference ManualGeorge VasquezNo ratings yet
- Digital Output Module SM 322 DO 16 X AC 120/230 V/1 A (6ES7322-1FH00-0AA0)Document4 pagesDigital Output Module SM 322 DO 16 X AC 120/230 V/1 A (6ES7322-1FH00-0AA0)Fabio CavalheiroNo ratings yet
- Sigmadrive Ac Traction Technical Manual SK79646-02Document94 pagesSigmadrive Ac Traction Technical Manual SK79646-02Gilson Torres DiasNo ratings yet
- Whirlpool JT 359 Alu PDFDocument6 pagesWhirlpool JT 359 Alu PDFGustavo Valdez100% (2)
- Simoreg CMDocument638 pagesSimoreg CMwww.otomasyonegitimi.com100% (1)
- Azkoyen Vitale - S PDFDocument34 pagesAzkoyen Vitale - S PDFAhmad FauzanNo ratings yet
- Service Manual: HCD-GR5/RX50Document66 pagesService Manual: HCD-GR5/RX50petra berindeaNo ratings yet
- Re Load Cell Calibration With Vela AmlifierDocument2 pagesRe Load Cell Calibration With Vela Amlifierprakash prakashNo ratings yet
- Pe 194802B Philips Manual DatasheetDocument14 pagesPe 194802B Philips Manual DatasheetMárcio FernandesNo ratings yet
- Sie20034 ST Microelectronics - Product InformationDocument2 pagesSie20034 ST Microelectronics - Product Informationvagner correa0% (1)
- Yamaha RX-V2067, HTR-9063, RX-A2000 PDFDocument190 pagesYamaha RX-V2067, HTR-9063, RX-A2000 PDFboroda24100% (1)
- Dell XPS L502X ManualDocument59 pagesDell XPS L502X ManualNonitus OctingentiNo ratings yet
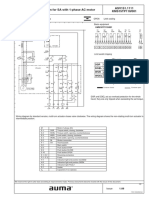
- Proposed Wiring Diagram For SA With 1-Phase AC Motor ASV151.1111 KMS15TP110/001Document2 pagesProposed Wiring Diagram For SA With 1-Phase AC Motor ASV151.1111 KMS15TP110/001cosmin1975No ratings yet
- 36V/3A 500Khz Synchronous Step-Down Converter: FeaturesDocument10 pages36V/3A 500Khz Synchronous Step-Down Converter: FeaturesDmitrNo ratings yet
- Micro Controller 89c51Document17 pagesMicro Controller 89c51g_prashanth0704075No ratings yet
- Display & Signal DescriptionDocument13 pagesDisplay & Signal DescriptionnelsonNo ratings yet
- 61rXd Xe47lDocument4 pages61rXd Xe47lAlvaro MarambioNo ratings yet
- 004A英文说明书Document20 pages004A英文说明书skyddNo ratings yet
- Solution: Wireshark Lab: NATDocument3 pagesSolution: Wireshark Lab: NATRamanjeet Singh AidhanNo ratings yet
- Lexmark Cxx10 MFP: Machine Type 7527-2Xx, - 4Xx, - 63XDocument394 pagesLexmark Cxx10 MFP: Machine Type 7527-2Xx, - 4Xx, - 63XOmar SanchezNo ratings yet
- 69A-3.012 Standards of The National Fire Protection Association and Other Standards AdoptedDocument7 pages69A-3.012 Standards of The National Fire Protection Association and Other Standards AdoptedpippoNo ratings yet
- Auto Tune Live User Guide v01Document27 pagesAuto Tune Live User Guide v01AnthonyNo ratings yet
- Tricentis Tosca Powered by Vision AI Data Sheet 30.10.20Document2 pagesTricentis Tosca Powered by Vision AI Data Sheet 30.10.20nitomac608No ratings yet
- L2 MKT205 For StudentsDocument28 pagesL2 MKT205 For StudentsThenappan GanesenNo ratings yet
- Lean Blow Out Limits of A Gas Turbine CombustorDocument10 pagesLean Blow Out Limits of A Gas Turbine CombustorFayçal MahieddineNo ratings yet
- Understanding AreaDocument114 pagesUnderstanding Areamarinum7No ratings yet
- TPMM MCQs On Unit - IDocument71 pagesTPMM MCQs On Unit - IRohit ShindeNo ratings yet
- Delamination Repair ProcedureDocument2 pagesDelamination Repair ProceduregnanasekarNo ratings yet
- Second Semester - Final Exam - Google FormsDocument11 pagesSecond Semester - Final Exam - Google FormsAriel LumactodNo ratings yet
- FSOG 13-005 General Insp TenarisDocument10 pagesFSOG 13-005 General Insp TenarisJanderson Sanchez Castañeda0% (1)
- Spare Parts Manual: ModelsDocument78 pagesSpare Parts Manual: ModelsÁrpád AndrisNo ratings yet
- SevcikDocument4 pagesSevcikflgrhnNo ratings yet
- The Role of Experiments in Scientific InquiryDocument41 pagesThe Role of Experiments in Scientific InquiryRika AmelliaNo ratings yet
- Time Entry Rule Fast Formula Reference Guide: Oracle Fusion Time and LaborDocument25 pagesTime Entry Rule Fast Formula Reference Guide: Oracle Fusion Time and Laborsiapa SherlockNo ratings yet
- Simple Phenomena of Magnetism 1 MSDocument4 pagesSimple Phenomena of Magnetism 1 MSnssNo ratings yet
- Lighttools Solidworks Link Module: Optimize Parts and AssembliesDocument3 pagesLighttools Solidworks Link Module: Optimize Parts and AssembliesKolin LeeNo ratings yet
- Detailed Lesson Plan in Computer System Servicing 11Document5 pagesDetailed Lesson Plan in Computer System Servicing 11Reymart BorresNo ratings yet
- GE1125 Architecture and Space in Chinese Culture 建築空間與中國文化: 1. AbstractDocument2 pagesGE1125 Architecture and Space in Chinese Culture 建築空間與中國文化: 1. AbstractGrace CheungNo ratings yet
- Ashwin ProjectDocument35 pagesAshwin ProjectShraddha WagheNo ratings yet
- 4 Const Prob. and Sol. Burj KhalifaDocument5 pages4 Const Prob. and Sol. Burj Khalifaprakriti goyalNo ratings yet
- Subsynchronous Resonance and FACTS-Novel Control Strategy For Its MitigationDocument15 pagesSubsynchronous Resonance and FACTS-Novel Control Strategy For Its Mitigationantoniolml10No ratings yet
- Spring Framework NotesDocument93 pagesSpring Framework Notestoxiczephyr08No ratings yet
- SeleneiumDocument112 pagesSeleneiumdungeonmasterNo ratings yet
- Assignment 3Document3 pagesAssignment 3teweldeNo ratings yet
- Elc-08-Qc-08-001 - Qe-28 - Generator Pi Test Gas Engine 1Document1 pageElc-08-Qc-08-001 - Qe-28 - Generator Pi Test Gas Engine 1Alvin Raviksyah PutraNo ratings yet
- The Perfect Thread: - Walter Titex & Walter PrototypDocument53 pagesThe Perfect Thread: - Walter Titex & Walter PrototypTeenTeen GaMingNo ratings yet
- Guide to creating a mine site reconciliation code of practiceDocument11 pagesGuide to creating a mine site reconciliation code of practicecajimenezb8872No ratings yet
- EBRD Technical and Financial Proposal FormsDocument9 pagesEBRD Technical and Financial Proposal Formsaspany loisNo ratings yet