You might also like
- PLC Based Traffic Control System ReportDocument51 pagesPLC Based Traffic Control System ReportAbhijeet Shinde73% (26)
- Spare Parts and Project For Scheidt and BachmannDocument223 pagesSpare Parts and Project For Scheidt and Bachmannnachit01No ratings yet
- Wave Enrgy Input To DesalinationDocument8 pagesWave Enrgy Input To DesalinationveepekayNo ratings yet
- Renewable Energy: M.C. Verbeek, R.J. Labeur, W.S.J. UijttewaalDocument12 pagesRenewable Energy: M.C. Verbeek, R.J. Labeur, W.S.J. UijttewaalAhmad YaniNo ratings yet
- J Energy 2019 07 091Document16 pagesJ Energy 2019 07 091teguh syafmedioNo ratings yet
- Design and Performance Analysis of Water Vortex Powerplant in Context of NepalDocument21 pagesDesign and Performance Analysis of Water Vortex Powerplant in Context of NepalrexyNo ratings yet
- Designing of Load Response Generation Synchronized 15MW Hydropower Station and Simulation Based Electromechanical and Structural AnalysisDocument17 pagesDesigning of Load Response Generation Synchronized 15MW Hydropower Station and Simulation Based Electromechanical and Structural AnalysismilanNo ratings yet
- Design and Analysis of The Mooring System For TheDocument8 pagesDesign and Analysis of The Mooring System For ThetuannbNo ratings yet
- Modeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy ConversionDocument39 pagesModeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy ConversionMohamed SaidNo ratings yet
- Energies 08 01273 VDocument15 pagesEnergies 08 01273 VCovai PowerNo ratings yet
- Analysis of Hydrogen Use in Gas Turbine PlantsDocument11 pagesAnalysis of Hydrogen Use in Gas Turbine PlantsАлександр ТумановNo ratings yet
- Mat Lab Simulation Procedure For DesignDocument15 pagesMat Lab Simulation Procedure For DesignAbdul wahid ButtNo ratings yet
- Abubakar Proposal OldDocument5 pagesAbubakar Proposal OldAbubakar QaziNo ratings yet
- 2.reactive Power and Voltage Control of Offshore Wind Farms (PDFDrive)Document146 pages2.reactive Power and Voltage Control of Offshore Wind Farms (PDFDrive)Nam Hoai LeNo ratings yet
- Power Convertersfor Wind TurbinesDocument14 pagesPower Convertersfor Wind Turbinessteinman1No ratings yet
- 3 Ssde - 162-01Document2 pages3 Ssde - 162-01Cristhian JaureguiNo ratings yet
- Shri H.H.J.B. Polytechnic, Chandwad, Nashik: Project Title: Prepare A Model of Telescopic Hydraulic JackDocument13 pagesShri H.H.J.B. Polytechnic, Chandwad, Nashik: Project Title: Prepare A Model of Telescopic Hydraulic JackTejas PawarNo ratings yet
- The Integration of Large Scale Wind Power GeneratiDocument9 pagesThe Integration of Large Scale Wind Power Generatijesus torresNo ratings yet
- Vulcan XC72 PDFDocument2 pagesVulcan XC72 PDFjdiaz87No ratings yet
- Energies 16 03687Document40 pagesEnergies 16 03687cherrrybombb23No ratings yet
- Trejo 2018Document10 pagesTrejo 2018Rosa BedoyaNo ratings yet
- energies-13-05196Document31 pagesenergies-13-05196gayaseshaNo ratings yet
- ... A Transformer Less Compact and Light Wind Turbine Generating System For Offshore Wind FarmsDocument7 pages... A Transformer Less Compact and Light Wind Turbine Generating System For Offshore Wind FarmselginNo ratings yet
- Point Absorber For The Mideteranian SeaDocument23 pagesPoint Absorber For The Mideteranian SeaFouad SaadNo ratings yet
- Introduction Pinaka Final 2Document20 pagesIntroduction Pinaka Final 2Birthley RagasaNo ratings yet
- Hydropower Production Optimization FromDocument16 pagesHydropower Production Optimization Frompat juvNo ratings yet
- Hydropower Production Optimization From Inflow: Case Study of Songloulou HydroplantDocument16 pagesHydropower Production Optimization From Inflow: Case Study of Songloulou HydroplantDeutMbNo ratings yet
- Veículo Elétrico Com Interface para A Rede Elétrica Grid Interface For An Electric VehicleDocument145 pagesVeículo Elétrico Com Interface para A Rede Elétrica Grid Interface For An Electric VehiclebartolomeukrisNo ratings yet
- Alternative Energy Final Draft ppt2Document20 pagesAlternative Energy Final Draft ppt2Bharat BalgobinNo ratings yet
- River Current Energy Conversion Systems: Progress, Prospects and ChallengesDocument17 pagesRiver Current Energy Conversion Systems: Progress, Prospects and ChallengesJuan Carlos Briceño CuevasNo ratings yet
- Economic viability of floating solar powerDocument12 pagesEconomic viability of floating solar powerManna PintoNo ratings yet
- Analysis of Electro-Hydraulic Lifting System's Energy Efficiency With Direct Electric Drive Pump ControlDocument7 pagesAnalysis of Electro-Hydraulic Lifting System's Energy Efficiency With Direct Electric Drive Pump ControlBerta BernaliaNo ratings yet
- Computational Study To Assess The Influence of Overlap Ratio On Static Torque Characteristics of A Vertical Axis Wind TurbineDocument9 pagesComputational Study To Assess The Influence of Overlap Ratio On Static Torque Characteristics of A Vertical Axis Wind TurbineFAZAL ELLAHINo ratings yet
- Puntos AbsorventesDocument22 pagesPuntos Absorventesarti999No ratings yet
- Estimating Daily Water Flow from Solar DataDocument6 pagesEstimating Daily Water Flow from Solar DataSwagat PradhanNo ratings yet
- Energy Efficiency of Pneumatic Power Take-Off For Wave Energy ConverterDocument32 pagesEnergy Efficiency of Pneumatic Power Take-Off For Wave Energy ConverterArbanas IvanNo ratings yet
- Power Quality Analysis of Distributed Wind Generation SystemsDocument6 pagesPower Quality Analysis of Distributed Wind Generation SystemsCésar Díaz LiberonaNo ratings yet
- Water: Hydropower Generation Through Pump As Turbine: Experimental Study and Potential Application To Small-Scale WDNDocument19 pagesWater: Hydropower Generation Through Pump As Turbine: Experimental Study and Potential Application To Small-Scale WDNJuuzou Tooru Karma TobioNo ratings yet
- STATCOM and Capacitor Banks in A Fixed-Speed Wind PDFDocument12 pagesSTATCOM and Capacitor Banks in A Fixed-Speed Wind PDFيوسف خضر النسورNo ratings yet
- STATCOM and Capacitor Banks in A Fixed-Speed Wind PDFDocument12 pagesSTATCOM and Capacitor Banks in A Fixed-Speed Wind PDFيوسف خضر النسورNo ratings yet
- Eco Friendly POWER Generation Through Speed Breakers: Presented By-Biswajeet Pradhan 1301104035 Electrical Engg. (7 Sem)Document28 pagesEco Friendly POWER Generation Through Speed Breakers: Presented By-Biswajeet Pradhan 1301104035 Electrical Engg. (7 Sem)Subhashree Rout100% (1)
- Design Modelling and Analysis of A Large FloatingDocument29 pagesDesign Modelling and Analysis of A Large FloatingAdrNo ratings yet
- A Hybrid Wind and Hydroelectric Power Production SystemDocument6 pagesA Hybrid Wind and Hydroelectric Power Production SystemEditor IJTSRDNo ratings yet
- 11 180815ASwitched-CapacitorBidirectionalDCDCDocument12 pages11 180815ASwitched-CapacitorBidirectionalDCDCPatil MounicareddyNo ratings yet
- THD Reduction in Wind Energy System Using Type-4 Wind Turbine/PMSG Applying The Active Front-End Converter Parallel OperationDocument23 pagesTHD Reduction in Wind Energy System Using Type-4 Wind Turbine/PMSG Applying The Active Front-End Converter Parallel Operationruben773No ratings yet
- Design and Implementation of A 5 KW Photovoltaic System With Li-Ion Battery and Additional DC-DC ConverterDocument7 pagesDesign and Implementation of A 5 KW Photovoltaic System With Li-Ion Battery and Additional DC-DC ConverterSherif AhmedNo ratings yet
- Approach For Cost Determination of Electro-MechaniDocument6 pagesApproach For Cost Determination of Electro-MechaniFrezer SolomonNo ratings yet
- 1 s2.0 S0360319913010379 MainDocument9 pages1 s2.0 S0360319913010379 MainveepekayNo ratings yet
- Power Point Presentation Summer Training, NHPC, JammuDocument39 pagesPower Point Presentation Summer Training, NHPC, JammuAashish Singhal60% (5)
- VH Generators 21 VVK VH3403 enDocument16 pagesVH Generators 21 VVK VH3403 entonNo ratings yet
- Optimization of Daily Operation of Micro Hydro Power Plant Coupled With Compress Air StorageDocument5 pagesOptimization of Daily Operation of Micro Hydro Power Plant Coupled With Compress Air StorageIcmi Alif SafitriNo ratings yet
- Location of Energy Storage Units / Base-Load Generation ScenariosDocument6 pagesLocation of Energy Storage Units / Base-Load Generation ScenariosFaraj AlferjaniNo ratings yet
- Axial-flow turbines for low-cost microhydro systemsDocument13 pagesAxial-flow turbines for low-cost microhydro systemsArivanandan Get GoingNo ratings yet
- Solar Wind Hybrid Generation System Integration With GridDocument6 pagesSolar Wind Hybrid Generation System Integration With GridEditor IJTSRDNo ratings yet
- AMPS 2020 - IITRoorkee - Brochure PDFDocument5 pagesAMPS 2020 - IITRoorkee - Brochure PDFknighthood4allNo ratings yet
- Rotor Powered Battery ChargerDocument32 pagesRotor Powered Battery ChargerMohamedHussein MohamedHusseinNo ratings yet
- High-Efficiency Rectifier With Wide Input Power Range Based On Power RecyclingDocument5 pagesHigh-Efficiency Rectifier With Wide Input Power Range Based On Power Recyclingsaeed gholamiNo ratings yet
- Practical tidal turbine design considerations: a review of technical alternatives and key design decisions leading to the SeaGen 1.2MW tidal turbineDocument20 pagesPractical tidal turbine design considerations: a review of technical alternatives and key design decisions leading to the SeaGen 1.2MW tidal turbineSthefanoNo ratings yet
- Economic and Technical Evaluation of Solar-Assisted Water Pump Stations For Mining Applications: A Case of StudyDocument6 pagesEconomic and Technical Evaluation of Solar-Assisted Water Pump Stations For Mining Applications: A Case of StudyJulioNo ratings yet
- Revista Facultad de Ingeniería Universidad de AntioquiaDocument12 pagesRevista Facultad de Ingeniería Universidad de AntioquiaDadi DahalNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Process Analysis - VariabilityDocument26 pagesProcess Analysis - VariabilityJerry LeeNo ratings yet
- UntitledDocument880 pagesUntitledmahdi beheshti100% (1)
- Quantifying The Seasonal Cooling Capacity of Green Infrastr 2020 LandscapeDocument21 pagesQuantifying The Seasonal Cooling Capacity of Green Infrastr 2020 Landscape熙槃No ratings yet
- Construction Management LecturesDocument8 pagesConstruction Management LecturesJosua MenisNo ratings yet
- Oferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Document3 pagesOferta Bodor: Model (E) Pret ( Fara TVA) Garantie Modele CO2Librarie PapetarieNo ratings yet
- Manual Horno 3DDocument11 pagesManual Horno 3DJose ZuñigaNo ratings yet
- Developer'S Cheat Sheet: @gregsramblings Feedback?Document1 pageDeveloper'S Cheat Sheet: @gregsramblings Feedback?JLeeNo ratings yet
- Does Not Export The Right Colors by The Bodymovin in The Gradient Issue #1440 Airbnblottie-Web GitHubDocument1 pageDoes Not Export The Right Colors by The Bodymovin in The Gradient Issue #1440 Airbnblottie-Web GitHubAbirama ShankaraNo ratings yet
- IncidentXP Software Manual - For Release 9.2Document101 pagesIncidentXP Software Manual - For Release 9.2mpinto2011100% (1)
- Virtual Campus Tour Gets Positive Student FeedbackDocument6 pagesVirtual Campus Tour Gets Positive Student Feedbacksuwarno -No ratings yet
- DC Motoren LSK Technical Catalogue en Iss201712 e 3805 PDFDocument164 pagesDC Motoren LSK Technical Catalogue en Iss201712 e 3805 PDFJEDPNo ratings yet
- Action Plan Custodian SY 2018 FinalDocument2 pagesAction Plan Custodian SY 2018 FinalStarLord JedaxNo ratings yet
- Artificial Intelligence Big Data 01 Research PaperDocument32 pagesArtificial Intelligence Big Data 01 Research PapermadhuraNo ratings yet
- Object-Oriented Programming Assignment 2 - Library Management SystemDocument13 pagesObject-Oriented Programming Assignment 2 - Library Management SystemMohamed AhmedNo ratings yet
- Energy Saving HRC Fuse-Links: Blade Type HN 63 A - 800 A Cylindrical Type HF 2 A - 63 ADocument8 pagesEnergy Saving HRC Fuse-Links: Blade Type HN 63 A - 800 A Cylindrical Type HF 2 A - 63 AprekNo ratings yet
- 1000 JavaScript Interview QuestionsDocument200 pages1000 JavaScript Interview Questionsnarayanamoorthy knm100% (1)
- NP700Z5C Win7 Manual EngDocument138 pagesNP700Z5C Win7 Manual EngTariel GatenadzeNo ratings yet
- CR5000 Pcb-Design-Master-Training PDFDocument295 pagesCR5000 Pcb-Design-Master-Training PDFviet phuong huynhNo ratings yet
- Centrifugal Compressors in Ethylene PlantsDocument5 pagesCentrifugal Compressors in Ethylene PlantsForcus onNo ratings yet
- C-Zone SDN BHD: WWW - Czone.myDocument2 pagesC-Zone SDN BHD: WWW - Czone.myFirman SyahNo ratings yet
- 1623917396609-Model Qsns On Comp - GroundDocument10 pages1623917396609-Model Qsns On Comp - Groundrupakdutta158No ratings yet
- Lesson Plan in Random VariableDocument10 pagesLesson Plan in Random VariableJeson N. RondinaNo ratings yet
- Neural NetworkDocument16 pagesNeural NetworkAkshay KambojNo ratings yet
- Mechanical Flotation Equipment Selection GuideDocument13 pagesMechanical Flotation Equipment Selection Guidelouza8No ratings yet
- Literature Review of Marketing PlanDocument6 pagesLiterature Review of Marketing Planc5nc3whz100% (1)
- Transformer Training (SNC Lavalin - District Cooling Project) - R01Document174 pagesTransformer Training (SNC Lavalin - District Cooling Project) - R01MohammedNo ratings yet
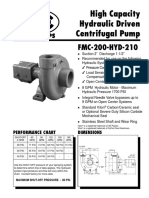
- FMC 200 Hyd 210Document2 pagesFMC 200 Hyd 210Ruben SaccoNo ratings yet
- CT18 Spare Part Book Without EngineDocument86 pagesCT18 Spare Part Book Without EngineTSPSRL Import ExportNo ratings yet