You might also like
- REC-BMS 9R SMA Sunny Island UserManualDocument17 pagesREC-BMS 9R SMA Sunny Island UserManualcristiNo ratings yet
- Manual BMS 16SDocument17 pagesManual BMS 16SPrabha Karan.n100% (1)
- Manual For REC Q BMS - Victron CompatibleDocument27 pagesManual For REC Q BMS - Victron CompatibleLada LabusNo ratings yet
- Bedienungsanleitung REC Q BMS 16SDocument28 pagesBedienungsanleitung REC Q BMS 16SADIL AIT TALBNo ratings yet
- REC Active BMSDocument29 pagesREC Active BMSJeff RuossNo ratings yet
- Power Slab: General OverviewDocument2 pagesPower Slab: General OverviewudhayNo ratings yet
- RFQ-60V1.2KWh and 1.45 KWHDocument7 pagesRFQ-60V1.2KWh and 1.45 KWHCheemaNo ratings yet
- Power Bric: General OverviewDocument2 pagesPower Bric: General OverviewudhayNo ratings yet
- 2kva UpsDocument53 pages2kva UpsSumit DasNo ratings yet
- EXCAR Battery EX51878 Manual (Beta Version)Document11 pagesEXCAR Battery EX51878 Manual (Beta Version)Sayed KhlileNo ratings yet
- SEPLOS 48V 100A BMS User Manual: Shenzhen Seplos Technology Co.,LtdDocument30 pagesSEPLOS 48V 100A BMS User Manual: Shenzhen Seplos Technology Co.,LtdDennis Go100% (2)
- 7.5 Kva UpsDocument54 pages7.5 Kva UpsSumit DasNo ratings yet
- CCL 24 Cargador de BateriasDocument2 pagesCCL 24 Cargador de BateriasMH..2023No ratings yet
- ASC Charge Controller ManualDocument24 pagesASC Charge Controller ManualNikolai TuretskyNo ratings yet
- Datasheet 10Document5 pagesDatasheet 10Kike VillasurNo ratings yet
- Manual For REC Active BMS - Victron CompatibleDocument27 pagesManual For REC Active BMS - Victron CompatibleLada LabusNo ratings yet
- 3A Synchronous Step Down DC/DC Converter: General Description FeaturesDocument12 pages3A Synchronous Step Down DC/DC Converter: General Description FeaturesFélix NicolauNo ratings yet
- Bd7776rfs Controlador Driver Motor DVD LGDocument4 pagesBd7776rfs Controlador Driver Motor DVD LGRoberto GonzalesNo ratings yet
- MOC3042Document7 pagesMOC3042Sunu PradanaNo ratings yet
- BMS 40a 3S - SGTDocument2 pagesBMS 40a 3S - SGTMarcelo MannettNo ratings yet
- Model: BMS-40A-3S-E / B / S: Starting Motor Less Than 60A / Power Less Than 100WDocument2 pagesModel: BMS-40A-3S-E / B / S: Starting Motor Less Than 60A / Power Less Than 100WNguyễn Tuấn QuốcNo ratings yet
- Telefono l3240b Twotone RingerDocument6 pagesTelefono l3240b Twotone Ringerblackbeast79No ratings yet
- SS3601 SS3602Document18 pagesSS3601 SS3602bicoxo8100No ratings yet
- (600 Volts Peak) : GlobaloptoisolatorDocument7 pages(600 Volts Peak) : Globaloptoisolatormarino246No ratings yet
- Driver de Motor Paso A PasoDocument4 pagesDriver de Motor Paso A PasoRoberto GonzalesNo ratings yet
- HA-03-398 PN1700-05952 HCVR-3 Wiring Diagram V2.03Document18 pagesHA-03-398 PN1700-05952 HCVR-3 Wiring Diagram V2.03JOSE BAQUERONo ratings yet
- S82B1B eDocument36 pagesS82B1B eMoscavo3No ratings yet
- Capacitive Voltage IndicatorDocument2 pagesCapacitive Voltage Indicatorparthaju100% (4)
- Din Rail Mounted Timers Chronos 2 Timers 17 5 MM 30751Document5 pagesDin Rail Mounted Timers Chronos 2 Timers 17 5 MM 30751Lahsen NhiliNo ratings yet
- Ir21531D (S) & (PBF) : Self-Oscillating Half-Bridge DriverDocument9 pagesIr21531D (S) & (PBF) : Self-Oscillating Half-Bridge DriverErasmo Franco SNo ratings yet
- Jameco Part Number 698998: Distributed byDocument20 pagesJameco Part Number 698998: Distributed byAbhjth RavikumarNo ratings yet
- BD9893F PDFDocument5 pagesBD9893F PDFboled_2No ratings yet
- 4 Electrical Data: 4.1 Maximum RatingsDocument1 page4 Electrical Data: 4.1 Maximum RatingsarturoNo ratings yet
- LWS-13S15A-370 13S 5A-20A Separate Port - QuestionsDocument2 pagesLWS-13S15A-370 13S 5A-20A Separate Port - QuestionsNelson MartinsNo ratings yet
- Manual Rele Alarmas Cargador A77 46RDocument5 pagesManual Rele Alarmas Cargador A77 46RHilmar Miguel Say GarcíaNo ratings yet
- LC5901S Data Sheet Rev.1.5: Sanken Electric Co., LTDDocument29 pagesLC5901S Data Sheet Rev.1.5: Sanken Electric Co., LTDRodolfo ArosemenaNo ratings yet
- Hipulse D-2KVA PunjLloyd - R1Document53 pagesHipulse D-2KVA PunjLloyd - R1Sumit DasNo ratings yet
- AM 01.1/AM 02.1: Technical Data Actuator ControlsDocument3 pagesAM 01.1/AM 02.1: Technical Data Actuator ControlsYousif Elsadig YousifNo ratings yet
- GAIA 11KVA Service Manual (En) PDFDocument98 pagesGAIA 11KVA Service Manual (En) PDFhighwtonNo ratings yet
- Pt100-Temperature-Relay Type TR600: Digital, 6 Sensors, 6 LimitsDocument2 pagesPt100-Temperature-Relay Type TR600: Digital, 6 Sensors, 6 LimitsAbu Yussif AlaboodiNo ratings yet
- QM81050 Data SheetDocument20 pagesQM81050 Data SheetLes VarietesNo ratings yet
- A043y701 MX321 enDocument44 pagesA043y701 MX321 enChhoan NhunNo ratings yet
- Panel Relay Remoto PDFDocument12 pagesPanel Relay Remoto PDFroberto sanchezNo ratings yet
- IC694MDL930 RX3i RelayOutputDocument5 pagesIC694MDL930 RX3i RelayOutputFelix BlancoNo ratings yet
- Lampiran Datasheet Arduino NanoDocument8 pagesLampiran Datasheet Arduino NanoАндэрь ЗорьгNo ratings yet
- LC5910S Data Sheet: Critical Current Mode Buck LED Driver ICDocument22 pagesLC5910S Data Sheet: Critical Current Mode Buck LED Driver ICnikko hinostrozaNo ratings yet
- Scalable and Modular Lithium-Ion Energy Storage SystemDocument2 pagesScalable and Modular Lithium-Ion Energy Storage SystemStone123456789No ratings yet
- 1s 3 7v 2a Lithium Ion Bms PCM 18650 Battery Protection Board PCB - 772881Document3 pages1s 3 7v 2a Lithium Ion Bms PCM 18650 Battery Protection Board PCB - 772881Akram LamaNo ratings yet
- Service ManualDocument18 pagesService ManualBuitinės Technikos RemontasNo ratings yet
- AM 01.1/AM 02.1: Technical Data Actuator ControlsDocument3 pagesAM 01.1/AM 02.1: Technical Data Actuator ControlsLuis MedinaNo ratings yet
- str-x6768n Ds en PDFDocument9 pagesstr-x6768n Ds en PDFCarlNo ratings yet
- Single-Phase Full-Wave Fan Motor Driver: Monolithic Digital ICDocument7 pagesSingle-Phase Full-Wave Fan Motor Driver: Monolithic Digital ICArif PurNo ratings yet
- Ts 914Document17 pagesTs 914PedroNo ratings yet
- Features Description: Block DiagramDocument7 pagesFeatures Description: Block DiagramAbhishek GuptaNo ratings yet
- Proportional Amplifier PV: For The Control of A Proportional SolenoidDocument8 pagesProportional Amplifier PV: For The Control of A Proportional SolenoidIvan BeljinNo ratings yet
- Type CV2: Auxiliary RelayDocument7 pagesType CV2: Auxiliary RelayNikki AgarwalNo ratings yet
- Str-x6759n Ds enDocument9 pagesStr-x6759n Ds enCleiton SilvaNo ratings yet
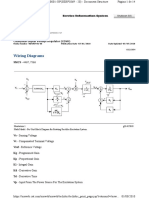
- Wiring Diagrams: Caterpillar Digital Voltage Regulator (CDVR)Document14 pagesWiring Diagrams: Caterpillar Digital Voltage Regulator (CDVR)wagner_guimarães_1No ratings yet
- FilipDocument15 pagesFilipKevin Eduardo JaureguiNo ratings yet
- SITC of 1 MW (2x500 KW) Solar Power Plant at HBCH&RC Mullanpur, Mohali, Punjab Client: TATA Memorial CentreDocument2 pagesSITC of 1 MW (2x500 KW) Solar Power Plant at HBCH&RC Mullanpur, Mohali, Punjab Client: TATA Memorial CentrearunghandwalNo ratings yet
- U10 2016 Catalog USDocument20 pagesU10 2016 Catalog USRamon BorbaNo ratings yet
- Junction BreakdownDocument41 pagesJunction BreakdownKamal Jeet SinghNo ratings yet
- Mabuchi Brushed DC Motor Model RS-555SHDocument1 pageMabuchi Brushed DC Motor Model RS-555SHRonald Alata100% (1)
- 2P162816-1 Dcs302ca61Document1 page2P162816-1 Dcs302ca61Ruan FernandesNo ratings yet
- Arithmetic Logic Unit: ObjectiveDocument4 pagesArithmetic Logic Unit: ObjectiveNour YoussefNo ratings yet
- Montage Georgia ჯ. პაპაშვილის N19: As BuiltDocument7 pagesMontage Georgia ჯ. პაპაშვილის N19: As BuiltAna MosiashviliNo ratings yet
- MCCB With ELCB Data SheetDocument1 pageMCCB With ELCB Data SheetIlham Bachtiar SetiyadjidNo ratings yet
- MCB 12V-8A MCB 24V-5A Battery ChargerDocument2 pagesMCB 12V-8A MCB 24V-5A Battery ChargerJosé Wilton AlvesNo ratings yet
- Gemini PMX-80Document9 pagesGemini PMX-80FLAVIO AlfaroNo ratings yet
- To UPS Configurations: Rotary UPS and GensetsDocument17 pagesTo UPS Configurations: Rotary UPS and GensetsDwi PutrantoNo ratings yet
- M54HC86 M74HC86: Quad Exclusive or GateDocument9 pagesM54HC86 M74HC86: Quad Exclusive or GatenooorNo ratings yet
- Circuit Breakers PresentationDocument49 pagesCircuit Breakers PresentationSyed Muhammad Munavvar Hussain89% (19)
- Mos of MV SWGDocument22 pagesMos of MV SWGGajendran SriramNo ratings yet
- Catalogo Completo Crouse HindsDocument48 pagesCatalogo Completo Crouse HindsWilliam Dante Mescco SaireNo ratings yet
- Washer. Seat Ibiza 2012Document2 pagesWasher. Seat Ibiza 2012Luis Ángel Santana VázquezNo ratings yet
- Gas Tungsten Arc WeldingDocument37 pagesGas Tungsten Arc WeldingRed ChaNo ratings yet
- Axpert MKS 1-3KVA Service Manual 20130611Document24 pagesAxpert MKS 1-3KVA Service Manual 20130611Muhammad Ismail100% (3)
- 3-Axis Slider Parts ListDocument3 pages3-Axis Slider Parts ListMuhammad Dadang AndrianNo ratings yet
- Rohit FoodDocument14 pagesRohit FoodmaninderpreetNo ratings yet
- Goldline Solar ControllerDocument12 pagesGoldline Solar ControllerJeff KirschNo ratings yet
- The Beginning of CellsDocument4 pagesThe Beginning of CellsAlli QueNo ratings yet
- BYG22D Diode PDFDocument5 pagesBYG22D Diode PDFHưng HQNo ratings yet
- Dfig Knowledge Sharing FinalDocument65 pagesDfig Knowledge Sharing Finalapoorva mensinkaiNo ratings yet
- Electronic Devices Lab MANUALDocument24 pagesElectronic Devices Lab MANUALna_hariprsadNo ratings yet
- New 1v6p Cams PartsDocument25 pagesNew 1v6p Cams PartsjoecentroneNo ratings yet
- 023 Electrical ChecklistDocument1 page023 Electrical ChecklistJunard Lu HapNo ratings yet
- Electricals Catalogue Jan 2016Document222 pagesElectricals Catalogue Jan 2016George E. TaulescuNo ratings yet