You might also like
- Embedded 2Document38 pagesEmbedded 2SHUBHANKAR SONINo ratings yet
- Computer Architecture Unit NotesDocument30 pagesComputer Architecture Unit NotesBalaji Shanmugam100% (1)
- Assembly Language Short Notes by VuDocument16 pagesAssembly Language Short Notes by VuSyed HadiNo ratings yet
- CST202 Module 5 - I/O Organization, Memory Systems, and InterruptsDocument34 pagesCST202 Module 5 - I/O Organization, Memory Systems, and InterruptsJoel K SanthoshNo ratings yet
- DDCO mod -2Document36 pagesDDCO mod -2pavan gowda tsNo ratings yet
- Co Module V 2020Document34 pagesCo Module V 2020jinto0007No ratings yet
- Uart, Spi & I2cDocument12 pagesUart, Spi & I2cdeepakacharya424No ratings yet
- I/O (Input / Output) and PeripheralsDocument30 pagesI/O (Input / Output) and PeripheralsgettodayNo ratings yet
- Project 2Document19 pagesProject 2Gaurav BaluNo ratings yet
- Unit-Iv Microcontroller (EC405) AVR Counters, Interrupt, Serial Input/output DataDocument32 pagesUnit-Iv Microcontroller (EC405) AVR Counters, Interrupt, Serial Input/output DataDr-Suraj Kumar SawNo ratings yet
- Chapter 4Document34 pagesChapter 4Aman Ethio LijNo ratings yet
- Input-Output Interfaces and Communication ProtocolsDocument21 pagesInput-Output Interfaces and Communication ProtocolsBlackk SpydoNo ratings yet
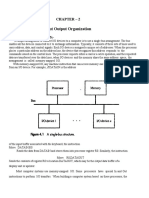
- Input Output Organization: Chapter - 2Document22 pagesInput Output Organization: Chapter - 2Rahul JainNo ratings yet
- 2.design and Simulation of UART Serial Communication Module Based On VHDLDocument4 pages2.design and Simulation of UART Serial Communication Module Based On VHDLsattarsekharNo ratings yet
- 8255PPIDocument60 pages8255PPIVedant BohraNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- CO Module 2 NotesDocument55 pagesCO Module 2 NotesEragon ShadeSlayerNo ratings yet
- COA Mod3@AzDOCUMENTS - inDocument9 pagesCOA Mod3@AzDOCUMENTS - inINDIAN LEGENDSNo ratings yet
- CS2253 U5 NotesDocument34 pagesCS2253 U5 Notesbhuvi2312No ratings yet
- Microprocessor Systems ExplainedDocument49 pagesMicroprocessor Systems ExplainedKarl Martin AlduesoNo ratings yet
- Labview Serial CommunicationDocument0 pagesLabview Serial Communicationmajidkhan04No ratings yet
- Interrupt Structure of 8051Document16 pagesInterrupt Structure of 8051Amar SinghNo ratings yet
- Unit-V: Introduction To I/ODocument17 pagesUnit-V: Introduction To I/Osurya suryaNo ratings yet
- Introduction To 8085 MicroprocessorDocument43 pagesIntroduction To 8085 MicroprocessorYosa Worku100% (1)
- High Speed Data Logging and Control SystemDocument59 pagesHigh Speed Data Logging and Control SystemmknunwalNo ratings yet
- Microprocesser 8085Document8 pagesMicroprocesser 8085Nilesh PatilNo ratings yet
- Serial Communication With 8051Document25 pagesSerial Communication With 8051prakriti sankhlaNo ratings yet
- Structural-Component-of-MicroprocessorsDocument53 pagesStructural-Component-of-MicroprocessorsJose Miguel RuizNo ratings yet
- Devices and communication buses module 2Document24 pagesDevices and communication buses module 2qwerty qwertyNo ratings yet
- Implementation of Uart and Ethernet Using FpgaDocument15 pagesImplementation of Uart and Ethernet Using FpgaBANDARU SRI RAM SAI GANESH BANDARU SRI RAM SAI GANESHNo ratings yet
- 3rd AnswerDocument8 pages3rd AnswerRAJANo ratings yet
- Tech-Tutorials Pic32-Tutorials Pic32mDocument7 pagesTech-Tutorials Pic32-Tutorials Pic32mAlgoNo ratings yet
- Basic Processing Unit:: Fundamental ConceptsDocument35 pagesBasic Processing Unit:: Fundamental ConceptsJoseph JohnNo ratings yet
- 8251Document5 pages8251Nihar PandaNo ratings yet
- 2.1 LPC2129 Microcontroller: 2.1.1 FeaturesDocument14 pages2.1 LPC2129 Microcontroller: 2.1.1 FeaturesBhaskar Rao PNo ratings yet
- B Tech CSE - IV Sem - TCS 404 Computer Organisation - Unit-3 Part IDocument123 pagesB Tech CSE - IV Sem - TCS 404 Computer Organisation - Unit-3 Part Iriyarajsaxena55555No ratings yet
- Mic Project ReportDocument11 pagesMic Project ReportDivya BansodeNo ratings yet
- UART in LPC2148 ARM7 MicrocontrollerDocument8 pagesUART in LPC2148 ARM7 Microcontrollerrudra_1No ratings yet
- CT1 SolDocument16 pagesCT1 Soln200vermaNo ratings yet
- 1-Architecture of 8085Document34 pages1-Architecture of 8085Pinki KumariNo ratings yet
- Session 5Document31 pagesSession 5Aravinth RameshNo ratings yet
- INTERRUPT To Power SupplyDocument3 pagesINTERRUPT To Power SupplyMathematics TutorNo ratings yet
- Chapter - 03: Memory-mapped I/O and I/O device interfacingDocument42 pagesChapter - 03: Memory-mapped I/O and I/O device interfacingJoseph JohnNo ratings yet
- Computer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A ProcessorDocument8 pagesComputer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A Processormd sayemNo ratings yet
- EMISY Second Test Exemplary Questions Solved-9Document14 pagesEMISY Second Test Exemplary Questions Solved-9YANG LIUNo ratings yet
- UART Serial Communication GuideDocument6 pagesUART Serial Communication GuideteekamNo ratings yet
- UNIT-1 Serial BusesDocument67 pagesUNIT-1 Serial BusesJalal WadoodNo ratings yet
- Unit IVCAO NotesDocument67 pagesUnit IVCAO NotesAshish PalandurkarNo ratings yet
- PLC NotesDocument170 pagesPLC NotesBikasita Talukdar100% (2)
- USARTDocument6 pagesUSARTAnoop S PillaiNo ratings yet
- Mpa Question Bank1Document16 pagesMpa Question Bank1Sharon FrancisNo ratings yet
- Pin Diagram of MPU 8085Document4 pagesPin Diagram of MPU 8085Pankaj BelgaonkarNo ratings yet
- System BusDocument12 pagesSystem Busdipyaman patgiriNo ratings yet
- B. Tech ProjectDocument52 pagesB. Tech ProjectSanthosh KammamNo ratings yet
- CH 3Document8 pagesCH 3Parth ThakkarNo ratings yet
- WIRELESS GESTURE CONTROLLED ROBOT WITH VOICE AND VIDEO CAMERA NewDocument83 pagesWIRELESS GESTURE CONTROLLED ROBOT WITH VOICE AND VIDEO CAMERA NewSuchitra SwarnaNo ratings yet
- Pic Microcontroller 2.1 Pic It Is A Family of Modified Harvard Architecture Microcontrollers MadeDocument16 pagesPic Microcontroller 2.1 Pic It Is A Family of Modified Harvard Architecture Microcontrollers MadeSuresh KumarNo ratings yet
- RS232 Serial Communication Configuration and BasicsDocument31 pagesRS232 Serial Communication Configuration and Basicsjaigodara100% (1)
- UartDocument25 pagesUartWajeed Mohamad100% (2)
- 3 RMS Experiment 1Document7 pages3 RMS Experiment 1Rz CNo ratings yet
- Dbms Minor Project: Hospital Database Management SystemDocument10 pagesDbms Minor Project: Hospital Database Management SystemThanmayee ThanuNo ratings yet
- Avtron ADMS: Advanced Digital Monitoring SystemDocument1 pageAvtron ADMS: Advanced Digital Monitoring SystemCondor GuatonNo ratings yet
- (R#1) XQ-450 - 600-800VDocument121 pages(R#1) XQ-450 - 600-800VFrancisco PestañoNo ratings yet
- T-RackS 3 User ManualDocument86 pagesT-RackS 3 User ManualMartin Salvador GrecoNo ratings yet
- Core Value SSD SurveyDocument5 pagesCore Value SSD SurveyNeo AndersonNo ratings yet
- AF120 (-S) US, AF230 (-S) US: On-Off, Spring Return Fail-Safe, 120 or 230 VACDocument11 pagesAF120 (-S) US, AF230 (-S) US: On-Off, Spring Return Fail-Safe, 120 or 230 VACAhmed Sherif CupoNo ratings yet
- Introduction to Computer Programming FundamentalsDocument30 pagesIntroduction to Computer Programming FundamentalsJeavs VargasNo ratings yet
- Prospectus For 14-15Document44 pagesProspectus For 14-15DIPAK VINAYAK SHIRBHATENo ratings yet
- Emi DebugDocument174 pagesEmi DebugRobin SinghNo ratings yet
- Eonstor Eonstords Esva Cli Umn v1.9Document183 pagesEonstor Eonstords Esva Cli Umn v1.9alexNo ratings yet
- 1mb1 (1j1mb450e1) Af115s Fino PremiumDocument58 pages1mb1 (1j1mb450e1) Af115s Fino PremiumMagnus Cycles PHNo ratings yet
- RX 101 en DM Printc (2010.02)Document2 pagesRX 101 en DM Printc (2010.02)monitex_twNo ratings yet
- SHIMADZU Specification AA-7000 FlameDocument7 pagesSHIMADZU Specification AA-7000 FlameSaifuddinNo ratings yet
- Lecture 2 - AGVDocument68 pagesLecture 2 - AGVUswatun HasanahNo ratings yet
- Troubleshoot Site-to-Site VPN IssuesDocument3 pagesTroubleshoot Site-to-Site VPN Issuesst_kannanNo ratings yet
- 2 Service Manual - LG - Lw60 Lw70Document119 pages2 Service Manual - LG - Lw60 Lw70Soporte Tecnico Buenos AiresNo ratings yet
- DLink Dir-655 Manual (Wireless N Router)Document97 pagesDLink Dir-655 Manual (Wireless N Router)Tom100% (5)
- Operator'S Manual: Deluxe Push Rotary Lawn MowerDocument24 pagesOperator'S Manual: Deluxe Push Rotary Lawn MowerWilliam F YehleNo ratings yet
- Accident Detection SystemDocument62 pagesAccident Detection SystemKarthik KingstarNo ratings yet
- Phins 2019Document2 pagesPhins 2019Ferdy Fer DNo ratings yet
- Fpe 3206Dv Service ManualDocument51 pagesFpe 3206Dv Service ManualJames BlankenshipNo ratings yet
- Mega - Operating Instructions PDFDocument12 pagesMega - Operating Instructions PDFAshish TIwariNo ratings yet
- San Boot 1Document31 pagesSan Boot 1JorgeNo ratings yet
- Instruction Sheet Is Nf8510 - Style Number Nf8510K, Nf8510TbDocument4 pagesInstruction Sheet Is Nf8510 - Style Number Nf8510K, Nf8510Tbdayshift5No ratings yet
- Using The Hardware Real-Time Clock-RTC DM00025071Document45 pagesUsing The Hardware Real-Time Clock-RTC DM00025071dcesenther100% (1)
- Samsung b1630n b1730nv b1930n NW b2030n b2230n LCD MonitorDocument51 pagesSamsung b1630n b1730nv b1930n NW b2030n b2230n LCD Monitordann22250% (2)
- iDoctorV7R1 PDFDocument636 pagesiDoctorV7R1 PDFmennaammarNo ratings yet
- MON2000 GC SoftwareDocument496 pagesMON2000 GC SoftwareSawate ChuariyakulNo ratings yet
- Cs2312 Lab ManualDocument43 pagesCs2312 Lab ManualAbishek A PriyanNo ratings yet