You might also like
- Properties of MIMO LTI SystemsDocument8 pagesProperties of MIMO LTI SystemsTom KigeziNo ratings yet
- Flatness and Motion Planning: The Car With: N TrailersDocument6 pagesFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousNo ratings yet
- Pages 16 To 23 (Annotated)Document8 pagesPages 16 To 23 (Annotated)Victor BenedictNo ratings yet
- Lumped Systems TheoryDocument7 pagesLumped Systems Theorynim1987No ratings yet
- L03 TimeResponseDocument41 pagesL03 TimeResponsekazem mokhtariNo ratings yet
- Control Systems I: Lecture 3: Time Response Suggested Readings: Astr Om & Murray Ch. 4-5, Guzzella Ch. 4Document29 pagesControl Systems I: Lecture 3: Time Response Suggested Readings: Astr Om & Murray Ch. 4-5, Guzzella Ch. 4Armando MaloneNo ratings yet
- Advanced Engineering Mathematics Si Edition 8th Edition Oneil Solutions Manual Full Chapter PDFDocument33 pagesAdvanced Engineering Mathematics Si Edition 8th Edition Oneil Solutions Manual Full Chapter PDFSandraMurraykean100% (14)
- Linear Stationary ModelsDocument16 pagesLinear Stationary ModelsKaled AbodeNo ratings yet
- IDC 402 TERM Paper Pooja ChughDocument11 pagesIDC 402 TERM Paper Pooja ChughPooja ChughNo ratings yet
- HW 5 SolDocument20 pagesHW 5 SolKhoa Le TienNo ratings yet
- Quiz 3 SolutionsDocument5 pagesQuiz 3 Solutionsyashar250075% (4)
- LTIDocument67 pagesLTIElectron FlowNo ratings yet
- Linear SystemsDocument58 pagesLinear SystemsCesar ApodacaNo ratings yet
- Pre Prac SS1Document17 pagesPre Prac SS1Lenny NdlovuNo ratings yet
- EE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004Document6 pagesEE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004bcooper477No ratings yet
- Introduction To System Modeling: Dynamic System Input U (T) Output y (T)Document19 pagesIntroduction To System Modeling: Dynamic System Input U (T) Output y (T)ettypasewangNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument27 pages16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNo ratings yet
- Vibration Matlab v9Document10 pagesVibration Matlab v9b_miniraoNo ratings yet
- MCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionDocument16 pagesMCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionChunyi WangNo ratings yet
- Discret IzationDocument18 pagesDiscret IzationsydofneeNo ratings yet
- Solution To Final Exam of SF2842 Geometric Control TheoryDocument3 pagesSolution To Final Exam of SF2842 Geometric Control TheoryBizzleJohnNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument4 pages16.323 Principles of Optimal Control: Mit OpencoursewareMohand Achour TouatNo ratings yet
- Linear SystemsDocument44 pagesLinear SystemsrajuvadlakondaNo ratings yet
- Examples 6Document3 pagesExamples 6emma.ubekuNo ratings yet
- Lecture 6 - State-Space Systems in Matlab: (T) A (T) + B (T) X X U C + D y X UDocument33 pagesLecture 6 - State-Space Systems in Matlab: (T) A (T) + B (T) X X U C + D y X UPythonraptorNo ratings yet
- Lecture 1Document5 pagesLecture 1johnte vokeNo ratings yet
- Slides Control System 2Document13 pagesSlides Control System 2Eric GardnerNo ratings yet
- Balanced TruncationDocument15 pagesBalanced TruncationVineet KoundalNo ratings yet
- Introduction To Time Series Analysis. Lecture 7.: Peter BartlettDocument42 pagesIntroduction To Time Series Analysis. Lecture 7.: Peter BartlettNoga RoseNo ratings yet
- Geometry of Nonholonomic Systems: A. Bella Iche F. Jean J.J. RislerDocument38 pagesGeometry of Nonholonomic Systems: A. Bella Iche F. Jean J.J. RislerRuhul Amin MukutNo ratings yet
- I O C S: Ntroduction To Ptimal Ontrol YstemsDocument42 pagesI O C S: Ntroduction To Ptimal Ontrol YstemsSudhir GuptaNo ratings yet
- LQRDocument14 pagesLQRStefania Oliveira100% (1)
- Optimal Control of An Oscillator SystemDocument6 pagesOptimal Control of An Oscillator SystemJoão HenriquesNo ratings yet
- Simple Oscillator (Oscillator) : Yddot Ydot y 1 S 1 S ScopeDocument15 pagesSimple Oscillator (Oscillator) : Yddot Ydot y 1 S 1 S ScopeFadi DaouNo ratings yet
- Lab 3 State Feedback Control DesignDocument8 pagesLab 3 State Feedback Control DesignMuhammad AsaadNo ratings yet
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDocument5 pagesENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaNo ratings yet
- Lecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of StabilityDocument10 pagesLecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of Stabilitytennis1949No ratings yet
- Exercise 8: LQGDocument2 pagesExercise 8: LQGSreeja Sunder100% (1)
- ECE311 - Dynamic Systems and Control Linearization of Nonlinear SystemsDocument5 pagesECE311 - Dynamic Systems and Control Linearization of Nonlinear Systemsnirmal_inboxNo ratings yet
- Elements of Optimal Control Theory Pontryagin's Maximum PrincipleDocument11 pagesElements of Optimal Control Theory Pontryagin's Maximum PrinciplefaskillerNo ratings yet
- Lec02 2012eightDocument5 pagesLec02 2012eightPhạm Ngọc HòaNo ratings yet
- Poles Selection TheoryDocument6 pagesPoles Selection TheoryRao ZubairNo ratings yet
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 pagesOn Integral Control in Backstepping: Analysis of Different TechniqueslimakmNo ratings yet
- Lecture 10Document8 pagesLecture 10EdutamNo ratings yet
- Robotics: Control TheoryDocument54 pagesRobotics: Control TheoryPrakash RajNo ratings yet
- 01 IntroDocument28 pages01 Introsouvik5000No ratings yet
- Stability Theory For Nonlinear Systems: Giuseppe OrioloDocument47 pagesStability Theory For Nonlinear Systems: Giuseppe OriolomaryamNo ratings yet
- Method of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretDocument4 pagesMethod of Bifurcation Analysis of Hybrid Nonlinear Systems: Quentin BRANDON and Tetsushi UETA Dani'Ele Fournier-PrunaretmenguemengueNo ratings yet
- 3 - Control Strategies For Servo Drives - Rev 30-03-2021Document10 pages3 - Control Strategies For Servo Drives - Rev 30-03-2021Euge GalardiNo ratings yet
- Behaviour of Nonlinear SystemsDocument11 pagesBehaviour of Nonlinear SystemsCheenu SinghNo ratings yet
- Nonlinear Lect3Document16 pagesNonlinear Lect3win alfalahNo ratings yet
- Chapter 4 Controllability and Observability Part 2Document23 pagesChapter 4 Controllability and Observability Part 2Yucheng XiangNo ratings yet
- AE353 Homework #1: State Space and The Matrix Exponential (Part 1)Document5 pagesAE353 Homework #1: State Space and The Matrix Exponential (Part 1)Marcos Paulo Aragão SantosNo ratings yet
- P M - E L S: Ractice ID Term XAM Inear Ystems Jo Ao P. HespanhaDocument1 pageP M - E L S: Ractice ID Term XAM Inear Ystems Jo Ao P. HespanhaVishay RainaNo ratings yet
- Stabilisation of Under-Actuated Systems Using Reinforcement LearningDocument16 pagesStabilisation of Under-Actuated Systems Using Reinforcement LearningNiharika ChallapalliNo ratings yet
- MATLab Tutorial #5 PDFDocument7 pagesMATLab Tutorial #5 PDFsatyamgovilla007_747No ratings yet
- Chapter 11: Nonlinear Observers:: A Pair of States (X An Input Function U Such ThatDocument9 pagesChapter 11: Nonlinear Observers:: A Pair of States (X An Input Function U Such ThatelectrotehnicaNo ratings yet
- OS-390 Project REC2Document2 pagesOS-390 Project REC2Justin OlinNo ratings yet
- Quadruple Rail-to-Rail Operational Amplifiers: Global Mixed-Mode Technology IncDocument1 pageQuadruple Rail-to-Rail Operational Amplifiers: Global Mixed-Mode Technology IncВладислав РусинNo ratings yet
- Actighost Rapid Gel™: Technical Data SheetDocument1 pageActighost Rapid Gel™: Technical Data SheetShajid HoshainNo ratings yet
- IEI News August 2022Document24 pagesIEI News August 2022Sumonto BagchiNo ratings yet
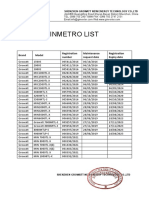
- 5 - Certificado InmetroDocument5 pages5 - Certificado InmetroDanilo MarinhoNo ratings yet
- Company, Inc.: 3-038R-R303 SF Multifunction AnalyzerDocument1 pageCompany, Inc.: 3-038R-R303 SF Multifunction AnalyzerHamdan IskandarNo ratings yet
- Schools Division Office Quezon City: How To Create Quiz On Google FormDocument31 pagesSchools Division Office Quezon City: How To Create Quiz On Google FormLove ShoreNo ratings yet
- Activities Guide and Evaluation Rubric - Task 8 - Analyzing A Current EventDocument6 pagesActivities Guide and Evaluation Rubric - Task 8 - Analyzing A Current EventAngie MedinaNo ratings yet
- Build Your Own CNC Milling Machine PDFDocument13 pagesBuild Your Own CNC Milling Machine PDFandres silvestreNo ratings yet
- LiuGong O E M Parts ListDocument64 pagesLiuGong O E M Parts ListChristian VicenteNo ratings yet
- Ite 600 SZXWT00990640Document17 pagesIte 600 SZXWT00990640Joselin Erika Saes PusariNo ratings yet
- Katalog Części Bobcat 320C From 517811001 To 51789999 PartsDocument345 pagesKatalog Części Bobcat 320C From 517811001 To 51789999 PartsHubert TojaNo ratings yet
- Effects of Online Learning On The Selected First Year Students College of Hospitality and Tourism at Arellano University - Juan Sumulong CampusDocument6 pagesEffects of Online Learning On The Selected First Year Students College of Hospitality and Tourism at Arellano University - Juan Sumulong CampusJohn Lloyd TomacaNo ratings yet
- Information and Computer Security 6Document18 pagesInformation and Computer Security 6Jehad MogyNo ratings yet
- Automatic H2o Pump ControllerDocument14 pagesAutomatic H2o Pump ControllerSowham ChatterjeeNo ratings yet
- Water Conveyance With Syphons: September, 2000 (Rev 2009)Document19 pagesWater Conveyance With Syphons: September, 2000 (Rev 2009)Sameer ShrivastavaNo ratings yet
- Assignment NADocument2 pagesAssignment NAAmna MuneerNo ratings yet
- Mitpe-Cxo - Cdo (Eng)Document6 pagesMitpe-Cxo - Cdo (Eng)roseland1976No ratings yet
- FL Switch 2000: User ManualDocument98 pagesFL Switch 2000: User ManualGustavo GamezNo ratings yet
- NIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationDocument6 pagesNIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationKshitija100% (1)
- Sap PP Configuration DocumentDocument75 pagesSap PP Configuration DocumentRafaelCasagrandeNo ratings yet
- Impact Consulting KrauthammerDocument16 pagesImpact Consulting Krauthammerapritul3539No ratings yet
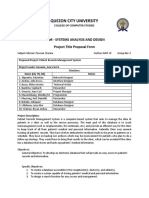
- Group 1 Revised Proposal. Patient Records Management SystemDocument2 pagesGroup 1 Revised Proposal. Patient Records Management SystemAlioding M. MacarimbangNo ratings yet
- Oracle Process ExecutionDocument552 pagesOracle Process ExecutionVineethNo ratings yet
- Multicalor 700.1 MD Multicalor 800.1 MD Multicalor 1000.1 MD Multicalor 1200.1 MDDocument24 pagesMulticalor 700.1 MD Multicalor 800.1 MD Multicalor 1000.1 MD Multicalor 1200.1 MDcristian villegasNo ratings yet
- Ebara Centrifugal Pumps 3 SeriesDocument82 pagesEbara Centrifugal Pumps 3 SeriesinsalatinaNo ratings yet
- Cmd. 00427991823303 Cmd. 00427991823303 Cmd. 00427991823303 Cmd. 00427991823303Document1 pageCmd. 00427991823303 Cmd. 00427991823303 Cmd. 00427991823303 Cmd. 00427991823303Niaz HussainNo ratings yet
- Orca Share Media1579045614908Document3 pagesOrca Share Media1579045614908Teresa Marie Yap CorderoNo ratings yet
- Sams Teach Yourself Regular Expressions in 10 MinutesDocument334 pagesSams Teach Yourself Regular Expressions in 10 MinutesDdNo ratings yet
- Paper 9007Document11 pagesPaper 9007IJARSCT JournalNo ratings yet