You might also like
- Arduino Applied: Comprehensive Projects for Everyday ElectronicsFrom EverandArduino Applied: Comprehensive Projects for Everyday ElectronicsNo ratings yet
- Compiler Design - Software Design ProjectDocument54 pagesCompiler Design - Software Design Projectal3mary0% (1)
- ASTRO UserguideDocument1,054 pagesASTRO UserguideMarwan Ahmed100% (1)
- 1300 Math Formulas - Alex SvirinDocument338 pages1300 Math Formulas - Alex SvirinMirnesNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemKaththi Karthick100% (1)
- Java SE 8 Fundamentals: Student Guide - Volume IIDocument354 pagesJava SE 8 Fundamentals: Student Guide - Volume IImehmet göçerNo ratings yet
- Design and Implementation Mobile Control RobotDocument6 pagesDesign and Implementation Mobile Control RobotIJRASETPublicationsNo ratings yet
- Arduino Distance Measurement Using Ultrasonic Sensor GuideDocument25 pagesArduino Distance Measurement Using Ultrasonic Sensor GuideNisha PatelNo ratings yet
- FIELDBUS ENGINEER's Guide - Pepperl+Fuchs PDFDocument474 pagesFIELDBUS ENGINEER's Guide - Pepperl+Fuchs PDFMuhammad ImranNo ratings yet
- Arduino Based Voice Controlled AutomobilesDocument20 pagesArduino Based Voice Controlled Automobilessatyajeet arakha75% (4)
- Research Proposal (Plaza)Document10 pagesResearch Proposal (Plaza)Edmarjan ConcepcionNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar Systemnilesh ojhaNo ratings yet
- Advanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2Document3 pagesAdvanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2xoxoNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemNithish K mNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar Systemsiri velpulaNo ratings yet
- Remote Area Monitoring RobotDocument5 pagesRemote Area Monitoring RobotIJSTENo ratings yet
- Fin Irjmets1658977133Document7 pagesFin Irjmets1658977133Hussein AlzoubaidiNo ratings yet
- CHNDDocument22 pagesCHNDchandhuNo ratings yet
- Arduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Document11 pagesArduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Spring SuperbNo ratings yet
- Remote-controlled Door Lock System Project ReportDocument7 pagesRemote-controlled Door Lock System Project Reportshruti soniNo ratings yet
- Mini Project SrihariDocument14 pagesMini Project SrihariAshik GRNo ratings yet
- Radar System Object DetectionDocument9 pagesRadar System Object DetectionPeerzada WahidNo ratings yet
- Water Level Indicator and Controller Project ReportDocument14 pagesWater Level Indicator and Controller Project ReportDivyansh MathurNo ratings yet
- Home Automation ReportDocument52 pagesHome Automation ReportShashank PandeyNo ratings yet
- Bluetooth Remote Controlled Car Using ArDocument4 pagesBluetooth Remote Controlled Car Using ArErnest ChiwaleNo ratings yet
- Human Following Robot ( ( (Aashiii) ) ) PDFDocument39 pagesHuman Following Robot ( ( (Aashiii) ) ) PDF20IF056 Aashi SahuNo ratings yet
- Phase II Batch10Document22 pagesPhase II Batch10S SREENATHNo ratings yet
- Project By: Mohammed Khalid Ali Khan (160517733302) Syed Shariq Hussain (160517733034) Sohail Askari (160517733073Document22 pagesProject By: Mohammed Khalid Ali Khan (160517733302) Syed Shariq Hussain (160517733034) Sohail Askari (160517733073Samnan KhaledNo ratings yet
- Design and Fabrication of A Radar System Using Power PointDocument17 pagesDesign and Fabrication of A Radar System Using Power PointOyadare sarahNo ratings yet
- CE Project-WheelchairDocument24 pagesCE Project-WheelchairHemanth YenniNo ratings yet
- Report SampleDocument13 pagesReport SampleAbuzar KhanNo ratings yet
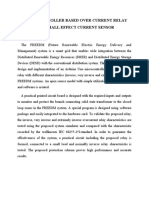
- Microcontroller Based Over Current Relay Using Hall Effect Current SensorDocument48 pagesMicrocontroller Based Over Current Relay Using Hall Effect Current SensorRoshan MNo ratings yet
- Wireless Bluetooth Controlled Robot Group ReportDocument18 pagesWireless Bluetooth Controlled Robot Group ReportAnkita PradhanNo ratings yet
- Women Safety Night Patrolling RobotDocument8 pagesWomen Safety Night Patrolling RobotIJRASETPublicationsNo ratings yet
- Design of Internet of Things (IoT) Based Hydroponic Controlling Device in Pyramid Greenhouse - Arif UmamiDocument8 pagesDesign of Internet of Things (IoT) Based Hydroponic Controlling Device in Pyramid Greenhouse - Arif UmamiDedi FatchurohmanNo ratings yet
- Obstacle Avoidance Robot Using ArduinoDocument5 pagesObstacle Avoidance Robot Using ArduinoRichard Kaven SerquinaNo ratings yet
- Design of Robotic Arm Controller Using Android AppDocument9 pagesDesign of Robotic Arm Controller Using Android AppIJRASETPublicationsNo ratings yet
- Obstacle avoidance robot using ArduinoDocument7 pagesObstacle avoidance robot using ArduinoPramod TNo ratings yet
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 pagesReview 1 (Phase II) - Batch-02 ModifiedVi LNo ratings yet
- Mini-Project Report Batch 11 PDFDocument25 pagesMini-Project Report Batch 11 PDFhem charanNo ratings yet
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 pagesReview 1 (Phase II) - Batch-02 ModifiedVi LNo ratings yet
- Smart Phone Controlled Electrical MachineDocument5 pagesSmart Phone Controlled Electrical MachinepradeepeeekingNo ratings yet
- Wireless Robot Collects Beach GarbageDocument15 pagesWireless Robot Collects Beach Garbagebalaji xeroxNo ratings yet
- CHNDDocument22 pagesCHNDchandhuNo ratings yet
- Voice Controlled Robotic System Using ArduinoDocument3 pagesVoice Controlled Robotic System Using ArduinoageesNo ratings yet
- Line Follower Robot Using Arduino: PBL Review Report OnDocument10 pagesLine Follower Robot Using Arduino: PBL Review Report OnAvinash KumarNo ratings yet
- Fire Extinguisher ReportDocument19 pagesFire Extinguisher ReportMANJOSH Roy 18No ratings yet
- IOT Garbage Monitoring with ArduinoDocument8 pagesIOT Garbage Monitoring with ArduinoLeo UltraNo ratings yet
- Live Human Detecting Robot For Earthquake Rescue OperationDocument5 pagesLive Human Detecting Robot For Earthquake Rescue OperationIntegrated Intelligent Research100% (1)
- REPORT (Copy)Document12 pagesREPORT (Copy)G.SUMANo ratings yet
- Combat Spy Robot Scans War FieldsDocument16 pagesCombat Spy Robot Scans War FieldsAimee MayerNo ratings yet
- SDDocument19 pagesSDnavedahmad0249No ratings yet
- IJCRT2207414 Mini Project Reasearch PaperDocument10 pagesIJCRT2207414 Mini Project Reasearch PaperHimanshu KumarNo ratings yet
- Android Phone Controlled Bluetooth Robot: April 2016Document12 pagesAndroid Phone Controlled Bluetooth Robot: April 2016Fakhr Al-TimimiNo ratings yet
- Android Controlled Fire Fighting RobotDocument5 pagesAndroid Controlled Fire Fighting RobotIJSTENo ratings yet
- Home Automation: Unversity of SahiwalDocument18 pagesHome Automation: Unversity of SahiwalIT Hub SLNo ratings yet
- 2B Mini Project Report 22-23 Arduino Based Tachometer 4 PDFDocument18 pages2B Mini Project Report 22-23 Arduino Based Tachometer 4 PDF10SHARMA SUMIT RAMADHINNo ratings yet
- 25 PDFDocument4 pages25 PDFPraveen Raju MNo ratings yet
- Design and Implementation of Line Follower Robot Using Arduino MicrocontrollerDocument4 pagesDesign and Implementation of Line Follower Robot Using Arduino MicrocontrollerFahru ZainiNo ratings yet
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- Android Phone Controlled Bluetooth RobotDocument12 pagesAndroid Phone Controlled Bluetooth RobotNazmul Shikder RiyadhNo ratings yet
- Floor Cleaning Robot ReportDocument40 pagesFloor Cleaning Robot ReportAnkita PradhanNo ratings yet
- 897-900 IJER - 2016 - 1209 KrishnaPrasadh KSDocument4 pages897-900 IJER - 2016 - 1209 KrishnaPrasadh KSInnovative Research PublicationsNo ratings yet
- 20bec0298 Labda5 20bec0298Document5 pages20bec0298 Labda5 20bec0298Adhiraj SaxenaNo ratings yet
- DP QuestionsDocument3 pagesDP QuestionsAdhiraj SaxenaNo ratings yet
- 20BDS0175 VL2023240105299 Ast01Document26 pages20BDS0175 VL2023240105299 Ast01Adhiraj SaxenaNo ratings yet
- 20bec0298 Labda6Document4 pages20bec0298 Labda6Adhiraj SaxenaNo ratings yet
- 20bec0298 VL2023240103357 Ast04Document4 pages20bec0298 VL2023240103357 Ast04Adhiraj SaxenaNo ratings yet
- HaroldDocument2 pagesHaroldAdhiraj SaxenaNo ratings yet
- BISHOP's Candlesticks: 1. Copy and Complete The Following Paragraph About The Theme of The Play in PairsDocument5 pagesBISHOP's Candlesticks: 1. Copy and Complete The Following Paragraph About The Theme of The Play in PairsAdhiraj SaxenaNo ratings yet
- Practice Test #1: Psat/NmsqtDocument95 pagesPractice Test #1: Psat/NmsqtNeea RaoNo ratings yet
- Bhu Uet 2019 Answer KeyDocument43 pagesBhu Uet 2019 Answer KeyAdhiraj SaxenaNo ratings yet
- PDF - Psat NMSQT Practice Answer Sheet PDFDocument4 pagesPDF - Psat NMSQT Practice Answer Sheet PDFAdhiraj SaxenaNo ratings yet
- Modern Operating SystemDocument75 pagesModern Operating SystemLaxmi Pandya allFacultyNo ratings yet
- Addendum For CARESCAPE Monitor B850 Service Manual: Networking Disclosure To Facilitate Network Risk ManagementDocument16 pagesAddendum For CARESCAPE Monitor B850 Service Manual: Networking Disclosure To Facilitate Network Risk ManagementantonioNo ratings yet
- HP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideDocument130 pagesHP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideMikel RichieNo ratings yet
- LTE BandsDocument1 pageLTE BandssulissetiawatiNo ratings yet
- Conditionals and Loops - Beginning Python Programming For Aspiring Web DevelopersDocument16 pagesConditionals and Loops - Beginning Python Programming For Aspiring Web DevelopersJames LiuNo ratings yet
- Acl and Ace, Dacl, SaclDocument1 pageAcl and Ace, Dacl, SacladitimbaNo ratings yet
- DG WLAN Secure Guest Access ArubaOS25Document43 pagesDG WLAN Secure Guest Access ArubaOS25luisNo ratings yet
- Catalog - Dahua Network Transmission Products and Solutions - V1.0 - EN - 202004 (32P) PDFDocument32 pagesCatalog - Dahua Network Transmission Products and Solutions - V1.0 - EN - 202004 (32P) PDFHelmy HtssNo ratings yet
- Vertiv Smart-Solutions-Intelligent-Integrated-Infrastructure-For-The-Data-CenterDocument12 pagesVertiv Smart-Solutions-Intelligent-Integrated-Infrastructure-For-The-Data-Centeryogesh chandrayanNo ratings yet
- Price ListDocument1 pagePrice Listejat_azimNo ratings yet
- MOKABUG-2010-Creating AppWorx Chains From Banner Processes and Reports-LorettaSampsonDocument48 pagesMOKABUG-2010-Creating AppWorx Chains From Banner Processes and Reports-LorettaSampsonHari KrishnaNo ratings yet
- How To Install SAPLinkDocument6 pagesHow To Install SAPLinkYani LieNo ratings yet
- Data Structures - CS301 HandoutsDocument510 pagesData Structures - CS301 HandoutsUzair BhattiNo ratings yet
- Values of Sy-Subrc After ABAP StatementsDocument3 pagesValues of Sy-Subrc After ABAP StatementsNameNo ratings yet
- Benq Joy Book Lite U101 - DA0JR1MB6C1 PDFDocument37 pagesBenq Joy Book Lite U101 - DA0JR1MB6C1 PDFJagopati Jr.No ratings yet
- Quotation For Hardware & SoftwareDocument5 pagesQuotation For Hardware & SoftwarePrashant PatelNo ratings yet
- 26 09 23 Lighting Control DevicesDocument2 pages26 09 23 Lighting Control DeviceskaichosanNo ratings yet
- Enel3dsh1 Lab1 PDFDocument5 pagesEnel3dsh1 Lab1 PDFNdumiso MtshaliNo ratings yet
- Presentation On OpenwrtDocument31 pagesPresentation On OpenwrtLuizNo ratings yet
- DMC Template With CGPA Calculation ComputerDocument19 pagesDMC Template With CGPA Calculation Computerabcdefgh100% (1)
- Hi-Fog Electric Pump UnitDocument2 pagesHi-Fog Electric Pump UnitAdvenser GroupNo ratings yet
- An overview of the FAT12 file systemDocument9 pagesAn overview of the FAT12 file systemJose Aldo AldoNo ratings yet
- System and Internet Speed Requirements: A Quick Guide On How To Produce The Information Needed For Your 5CA ApplicationDocument6 pagesSystem and Internet Speed Requirements: A Quick Guide On How To Produce The Information Needed For Your 5CA ApplicationJennNo ratings yet
- Multiple Choice Questions for Lecture 1 on Network SystemsDocument4 pagesMultiple Choice Questions for Lecture 1 on Network SystemsWadood QureshiNo ratings yet
- ELE447Document88 pagesELE447Lay ConNo ratings yet
- Pure Sine Wave Inverter Design: Proteus ISISDocument5 pagesPure Sine Wave Inverter Design: Proteus ISISTatenda BizureNo ratings yet