You might also like
- Mark Scheme (FINAL) : Pearson Edexcel IAL Mathematics (WMA12) Pure Mathematics P2Document28 pagesMark Scheme (FINAL) : Pearson Edexcel IAL Mathematics (WMA12) Pure Mathematics P2Newton JohnNo ratings yet
- Book - Python - Hands-On Simulation Model PythonDocument347 pagesBook - Python - Hands-On Simulation Model PythonKiều Nhi Nguyễn100% (3)
- 5.1. Initial Value Problem - IVPDocument49 pages5.1. Initial Value Problem - IVPzulkoNo ratings yet
- Digital Signal Processing With Mathlab Examples, Vol 1Document649 pagesDigital Signal Processing With Mathlab Examples, Vol 1Toti Caceres100% (3)
- Oct 18 SeatworkDocument24 pagesOct 18 SeatworkEasy WriteNo ratings yet
- HYPERBOLIC PDE Solution of 1D Wave Equation Using MATLABDocument1 pageHYPERBOLIC PDE Solution of 1D Wave Equation Using MATLABmarcelo_fis_matNo ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- 3 Non Linear ClassifiersDocument74 pages3 Non Linear ClassifiersVaishali DNo ratings yet
- Duff IngDocument7 pagesDuff IngCédric KueteNo ratings yet
- FinalprojectDocument2 pagesFinalprojectapi-268501572No ratings yet
- Exercise 1 2018Document5 pagesExercise 1 2018Trungtin Bui DucNo ratings yet
- Experiment-2: Plotting in MATLAB: Signals and Systems Lab (EC2P002)Document7 pagesExperiment-2: Plotting in MATLAB: Signals and Systems Lab (EC2P002)GAUTAM BUBNANo ratings yet
- Plotting Signals MATLABDocument7 pagesPlotting Signals MATLABGAUTAM BUBNANo ratings yet
- Kalman Filtering Practical Work: Last Name: First Name: GroupDocument9 pagesKalman Filtering Practical Work: Last Name: First Name: GroupFabricio VilcacundoNo ratings yet
- EE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004Document6 pagesEE 4443/4329 - Control Systems Design Project: Updated:Tuesday, June 15, 2004bcooper477No ratings yet
- Closed Forms For Numerical LoopsDocument29 pagesClosed Forms For Numerical LoopsTaolue ChenNo ratings yet
- ROB310 Mathematics for Robotics Problem Set 5Document4 pagesROB310 Mathematics for Robotics Problem Set 5Anderson DoidoNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- Exercises Part 2Document3 pagesExercises Part 2mileknzNo ratings yet
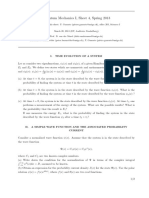
- Quantum Mechanics I, Sheet 4, Spring 2013: I. Time Evolution of A SystemDocument2 pagesQuantum Mechanics I, Sheet 4, Spring 2013: I. Time Evolution of A SystemB ToureNo ratings yet
- Hw5-Vision14 Solution4Document2 pagesHw5-Vision14 Solution4Mohiuddin AhmadNo ratings yet
- Calcul DiffDocument38 pagesCalcul Difffakraouicpge2019No ratings yet
- Metrology Ad Measuremet Systems: Index 330930, ISS 0860-8229 WWW - Metrology.pg - Gda.plDocument12 pagesMetrology Ad Measuremet Systems: Index 330930, ISS 0860-8229 WWW - Metrology.pg - Gda.plSiddharthNo ratings yet
- Field Exam - Controls: Department of Aeronautics and Astronautics, Massachusetts Institute of Technology January 2015Document2 pagesField Exam - Controls: Department of Aeronautics and Astronautics, Massachusetts Institute of Technology January 2015VigneshRamakrishnanNo ratings yet
- 2122 ExercisesDocument6 pages2122 ExercisesMiriam FortunatoNo ratings yet
- Explicit Method for Solving Wave EquationDocument5 pagesExplicit Method for Solving Wave EquationAvinash KumarNo ratings yet
- Signals Analysis - Assignment # 2: Fourier Transform: Universidad de La SalleDocument6 pagesSignals Analysis - Assignment # 2: Fourier Transform: Universidad de La SalleWilliam Steven Triana GarciaNo ratings yet
- Computer Vision MCQ's For InterviewDocument12 pagesComputer Vision MCQ's For InterviewMallikarjun patilNo ratings yet
- Mec500 (2012) Assignment 1Document6 pagesMec500 (2012) Assignment 1HilmyZulkifliNo ratings yet
- ME312 Lab Manual 2021 - Cantilever BeamDocument7 pagesME312 Lab Manual 2021 - Cantilever BeamPranav BajajNo ratings yet
- MPZ4230-Assignment 01-04Document10 pagesMPZ4230-Assignment 01-04surangabongaNo ratings yet
- Robotics:Perception AR TrackingDocument6 pagesRobotics:Perception AR TrackingTyploshion TKNo ratings yet
- MATH1052 Semester 2, 2014 Assignment 4Document1 pageMATH1052 Semester 2, 2014 Assignment 4Mid-age ManNo ratings yet
- Che614 Introduction To Hydrodynamic Stability Assignment 2 Due Date: 18 August 2014 Elementary Theory of BifurcationsDocument1 pageChe614 Introduction To Hydrodynamic Stability Assignment 2 Due Date: 18 August 2014 Elementary Theory of BifurcationsAnnas FauzyNo ratings yet
- SSP E1 Ex2b09Document2 pagesSSP E1 Ex2b09Orlando Solis MariacaNo ratings yet
- Practice Questions Set: Numerical Methods: t x i j ij i j πx δx iDocument3 pagesPractice Questions Set: Numerical Methods: t x i j ij i j πx δx iBishnu LamichhaneNo ratings yet
- hw1 19fDocument2 pageshw1 19fAmreshAmanNo ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument40 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- Libro Fasshauer Numerico AvanzadoDocument151 pagesLibro Fasshauer Numerico AvanzadoCarlysMendozaamorNo ratings yet
- Script 2Document62 pagesScript 2michaelNo ratings yet
- Quantum Mechanics - I Tutorial 0Document15 pagesQuantum Mechanics - I Tutorial 0IndrajitNo ratings yet
- DIP Question BankDocument9 pagesDIP Question Bankapi-3772517No ratings yet
- Control Systems Assignment-1Document6 pagesControl Systems Assignment-1catdogsunmoon12No ratings yet
- ProblemSet01 Solution PDFDocument14 pagesProblemSet01 Solution PDFSer RonellNo ratings yet
- CV EB Slides MotionDocument40 pagesCV EB Slides MotionshimaNo ratings yet
- EE132 Lab1 OL Vs CLDocument3 pagesEE132 Lab1 OL Vs CLthinkberry22No ratings yet
- Computer Graphics Lecture-1Document51 pagesComputer Graphics Lecture-1Nurchamonara SujanaNo ratings yet
- CH605 2023 24tutorial3Document2 pagesCH605 2023 24tutorial3NeerajNo ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- Lecture Notes On Regression: Markov Chain Monte Carlo (MCMC)Document13 pagesLecture Notes On Regression: Markov Chain Monte Carlo (MCMC)Ashwin VenkatesanNo ratings yet
- Lagrange Method of Interpolation - More Examples Industrial EngineeringDocument9 pagesLagrange Method of Interpolation - More Examples Industrial EngineeringAhsanNo ratings yet
- QPhys PS4Document2 pagesQPhys PS4Resting BeastNo ratings yet
- Practice Questions For 336, v1.4: Part 1Document20 pagesPractice Questions For 336, v1.4: Part 1H Aries OñaNo ratings yet
- Regression: Building Experimental ModelsDocument47 pagesRegression: Building Experimental ModelsOnur KirpiciNo ratings yet
- Ma9214-Applied Mathematics For Engineering DesignDocument5 pagesMa9214-Applied Mathematics For Engineering DesignsivaeinfoNo ratings yet
- Numeric Control of Mobile Robots 2007Document6 pagesNumeric Control of Mobile Robots 2007Romero GhyoNo ratings yet
- Robust Nonlinear Control of A Mobile RobotDocument8 pagesRobust Nonlinear Control of A Mobile RobotaliNo ratings yet
- Lab Manual: ME-411 Mechanical Engineering Laboratory - IVDocument23 pagesLab Manual: ME-411 Mechanical Engineering Laboratory - IVShashank KumarNo ratings yet
- 8) - M - Modelling-in-Mechanics HFODocument25 pages8) - M - Modelling-in-Mechanics HFOAgrata PouloseNo ratings yet
- Lab 2: Sampling, Convolution, LTI Systems, and Difference EquationsDocument5 pagesLab 2: Sampling, Convolution, LTI Systems, and Difference EquationsJane MoujaessNo ratings yet
- Lecture 4: Linearization: Modern Control SystemsDocument26 pagesLecture 4: Linearization: Modern Control SystemsORK BUNSOKRAKMUNYNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Introduction To Simulation With ANSYS MeDocument1 pageIntroduction To Simulation With ANSYS MeThanigai VelNo ratings yet
- Dehradun Public School SYLLABUS 2022-23 Class-Xii: ENGLISHDocument9 pagesDehradun Public School SYLLABUS 2022-23 Class-Xii: ENGLISHSatyakashi SaxenaNo ratings yet
- Quality) Terhadap Keputusan Pembelian (Purchase Decision) MelaluiDocument12 pagesQuality) Terhadap Keputusan Pembelian (Purchase Decision) MelaluiSatria WijayaNo ratings yet
- Condensed Matter PhysicsDocument10 pagesCondensed Matter PhysicsChristopher BrownNo ratings yet
- Motion in Straight Line Particle Problems SPM Additional MathematicsDocument1 pageMotion in Straight Line Particle Problems SPM Additional MathematicsmaazioNo ratings yet
- ALAMAR LabExercise5Document6 pagesALAMAR LabExercise5Clarissa AlfaroNo ratings yet
- Lab 2, Part B: Robot DC Motor: Speed Measurement Circuit DesignDocument31 pagesLab 2, Part B: Robot DC Motor: Speed Measurement Circuit DesignNunjaNo ratings yet
- Degrees of Freedom of Mechanisms: Mobility Analysis of Planar LinkagesDocument26 pagesDegrees of Freedom of Mechanisms: Mobility Analysis of Planar Linkagessupratik chakrabortyNo ratings yet
- Analyzing Simple Structures in Engineering Mechanics (CENG1041Document9 pagesAnalyzing Simple Structures in Engineering Mechanics (CENG1041nvnrevNo ratings yet
- 1-1 Unit Amp MeasurementDocument37 pages1-1 Unit Amp MeasurementeltytanNo ratings yet
- CS MCQDocument158 pagesCS MCQfawadNo ratings yet
- EA-4-02 REV01 - Expression of The Uncertainty of Measurement in CalibrationDocument29 pagesEA-4-02 REV01 - Expression of The Uncertainty of Measurement in CalibrationTiago Guimarães100% (1)
- Chaboche Material ModelDocument15 pagesChaboche Material Modelsashka133700% (1)
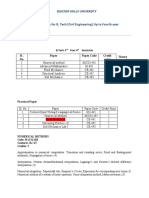
- Seacom Skills University: B.Tech 2 Year 4 Semester Theory Paper Sl. No. Paper Paper Code Credit PointDocument11 pagesSeacom Skills University: B.Tech 2 Year 4 Semester Theory Paper Sl. No. Paper Paper Code Credit PointM RoyNo ratings yet
- Ac DC LoadflowDocument35 pagesAc DC LoadflowSajith RpNo ratings yet
- Supplement - Statistical ThermodynamicsDocument73 pagesSupplement - Statistical ThermodynamicsPiousNo ratings yet
- 10 CIE IGCSE Additional Mathematics Topical Past Paper Trigonometry PDFDocument41 pages10 CIE IGCSE Additional Mathematics Topical Past Paper Trigonometry PDFChloe CxyNo ratings yet
- This Study Resource Was: Exercise 6-Statistical Inferences Group 5 Problem 1Document4 pagesThis Study Resource Was: Exercise 6-Statistical Inferences Group 5 Problem 1Grace EsterMNo ratings yet
- Seminar Topics Fall 10Document2 pagesSeminar Topics Fall 10Jimada AbdullahiNo ratings yet
- 8 - Number SystemDocument41 pages8 - Number SystemSarah Mae LavariasNo ratings yet
- Vibration 2 Marks For All Intrance ExamDocument11 pagesVibration 2 Marks For All Intrance ExamSeeandgrow ByabdulsamadNo ratings yet
- Dr. Muhammad Shahzad Department of Computing (DOC), SEECS, NUSTDocument45 pagesDr. Muhammad Shahzad Department of Computing (DOC), SEECS, NUSTMaham JahangirNo ratings yet
- Analytical Ability Practice Test Set 5 Answers RevisedDocument2 pagesAnalytical Ability Practice Test Set 5 Answers RevisedKylaNo ratings yet
- IGCSE Mathematics FormulaDocument1 pageIGCSE Mathematics FormulaFaseeh udeenNo ratings yet
- Permutation MatrixDocument2 pagesPermutation MatrixrodwellheadNo ratings yet
- Math13 - Advanced Statistics Lecture Note: Case of K-SamplesDocument13 pagesMath13 - Advanced Statistics Lecture Note: Case of K-SamplesAbegail VillanuevaNo ratings yet