You might also like
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Robust Stability of Positive Linear Time-Delay Sys PDFDocument21 pagesRobust Stability of Positive Linear Time-Delay Sys PDFSáng QuangNo ratings yet
- Cores of Euclidean Targets For Single-Delay Autonomous Linear Neutral Control SystemsDocument10 pagesCores of Euclidean Targets For Single-Delay Autonomous Linear Neutral Control SystemsinventionjournalsNo ratings yet
- On The Uniform Theory of Lacunary Series I. Berkes - Robert Tichy Volume - AistleitnerDocument26 pagesOn The Uniform Theory of Lacunary Series I. Berkes - Robert Tichy Volume - AistleitnerSam TaylorNo ratings yet
- Analytical - FinalDocument10 pagesAnalytical - FinalHayder AlsarajNo ratings yet
- Uniform Asymptotical Stability of Almost Periodic Solution of A Discrete Multispecies Lotka-Volterra Competition SystemDocument5 pagesUniform Asymptotical Stability of Almost Periodic Solution of A Discrete Multispecies Lotka-Volterra Competition Systemanil kasotNo ratings yet
- On explicit steady-state solutions of nonlinear feedback systemsDocument5 pagesOn explicit steady-state solutions of nonlinear feedback systemsSandhya RathoreNo ratings yet
- Nuerons ComplexityDocument4 pagesNuerons ComplexitysamsaenzxxxNo ratings yet
- Received 12 December 2005Document7 pagesReceived 12 December 2005Andres GuevaraNo ratings yet
- A Procedure For Determining The Exact Solution To A 2x2 First OrdDocument16 pagesA Procedure For Determining The Exact Solution To A 2x2 First OrdTomislav JagodicNo ratings yet
- Chaos in The Fractional Order Lorenz SystemDocument10 pagesChaos in The Fractional Order Lorenz Systemi.ethemsacuNo ratings yet
- Lecture02 PDFDocument78 pagesLecture02 PDFJimmy Bomfim de JesusNo ratings yet
- HD 7 Modal Analysis Undamped MDOFDocument45 pagesHD 7 Modal Analysis Undamped MDOFa_oucharNo ratings yet
- Nonl MechDocument59 pagesNonl MechDelila Rahmanovic DemirovicNo ratings yet
- The Existence of Generalized Inverses of Fuzzy MatricesDocument14 pagesThe Existence of Generalized Inverses of Fuzzy MatricesmciricnisNo ratings yet
- SdarticleDocument9 pagesSdarticleSachin KumarNo ratings yet
- Lyapunov Stability Theory: CY4A2: Advanced Nonlinear ControlDocument16 pagesLyapunov Stability Theory: CY4A2: Advanced Nonlinear ControlGözde YetkinNo ratings yet
- Kramer's RuleDocument7 pagesKramer's RuleLurkermanguyNo ratings yet
- Optimal Estimation of Low Rank Density MatricesDocument36 pagesOptimal Estimation of Low Rank Density MatricesVanidevi ManiNo ratings yet
- Laws of Classical or Quantum MechanicsDocument76 pagesLaws of Classical or Quantum MechanicsRockiesNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Lorenz System: IDC621: Non-Linear DynamicsDocument7 pagesThe Lorenz System: IDC621: Non-Linear DynamicsNikhil KumarNo ratings yet
- An Adaptive Simulated Annealing Algorithm PDFDocument9 pagesAn Adaptive Simulated Annealing Algorithm PDFfadhli202No ratings yet
- Algebras Advanced Lecture NoteDocument16 pagesAlgebras Advanced Lecture NoteHuong Cam ThuyNo ratings yet
- DecoherenceDocument40 pagesDecoherenceEduardNo ratings yet
- Communications On Pure and Applied Analysis Volume 10, Number 5, September 2011Document16 pagesCommunications On Pure and Applied Analysis Volume 10, Number 5, September 2011Uli Urio-LegoNo ratings yet
- Problem2 PDFDocument3 pagesProblem2 PDFEdgar HuancaNo ratings yet
- Using Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachDocument7 pagesUsing Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachmxjoeNo ratings yet
- Stationary Solutions of The Gross-Pitaevskii Equation With Linear CounterpartDocument15 pagesStationary Solutions of The Gross-Pitaevskii Equation With Linear CounterpartRoberto D'AgostaNo ratings yet
- Solving Nonlinear Algebraic Systems Using Artificial Neural NetworksDocument13 pagesSolving Nonlinear Algebraic Systems Using Artificial Neural NetworksAthanasios MargarisNo ratings yet
- Lie Symmetries of Differential EquationsDocument22 pagesLie Symmetries of Differential EquationsAnonymous Tph9x741100% (1)
- Study of Classical Integrable Field Thoery and Defect ProblemDocument28 pagesStudy of Classical Integrable Field Thoery and Defect ProblemMuhammad Hasan RazaNo ratings yet
- Complex plane representations of resonant systemsDocument23 pagesComplex plane representations of resonant systemsggNo ratings yet
- Repeated Eigenvalues in Multi-Degree SystemsDocument6 pagesRepeated Eigenvalues in Multi-Degree SystemsMradul YadavNo ratings yet
- Particle in A BoxDocument9 pagesParticle in A BoxVibhu MittalNo ratings yet
- I Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7Document6 pagesI Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7International Journal of computational Engineering research (IJCER)No ratings yet
- An Implicit Difference Scheme For The Fourth-Order Nonlinear Partial Integro-Differential EquationsDocument25 pagesAn Implicit Difference Scheme For The Fourth-Order Nonlinear Partial Integro-Differential EquationstuljabhavanikfpcNo ratings yet
- Lyapunov ArticleDocument15 pagesLyapunov ArticleValeria Montserrat Maya GonzalezNo ratings yet
- J.Thi-Qar Sci. Vol.3 (2) Feb./2012Document15 pagesJ.Thi-Qar Sci. Vol.3 (2) Feb./2012Kanthavel ThillaiNo ratings yet
- Numerical Treatment of Nonlinear Third Order Boundary Value ProblemDocument6 pagesNumerical Treatment of Nonlinear Third Order Boundary Value Problemdebbie131313No ratings yet
- An Algorithm To Compute The Transfer Function of A Mechanical SystemDocument6 pagesAn Algorithm To Compute The Transfer Function of A Mechanical SystemquestrwpNo ratings yet
- VI. Notes (Played) On The Vibrating StringDocument20 pagesVI. Notes (Played) On The Vibrating Stringjose2017No ratings yet
- LaSalle in Variance PrincipleDocument5 pagesLaSalle in Variance PrinciplechvngNo ratings yet
- Physics Letters A: D.W. Lee, W.J. Yoo, S.C. WonDocument7 pagesPhysics Letters A: D.W. Lee, W.J. Yoo, S.C. WonRafael Gonçalves de LimaNo ratings yet
- Variacional Coplex NNN4Document8 pagesVariacional Coplex NNN4Ascanio BarbosaNo ratings yet
- 1 s2.0 S0895717710001743 MainDocument7 pages1 s2.0 S0895717710001743 MainAhmad DiabNo ratings yet
- Remark on the divergence of Fourier seriesDocument7 pagesRemark on the divergence of Fourier seriesAbu Bakr M. SaeedNo ratings yet
- Agmon 1954Document11 pagesAgmon 1954anil.newscientistNo ratings yet
- Solving Underdetermined Nonlinear Equations by Newton-Like MethodDocument22 pagesSolving Underdetermined Nonlinear Equations by Newton-Like MethodMr. KNo ratings yet
- 1 s2.0 0022247X72901278 MainDocument12 pages1 s2.0 0022247X72901278 MainMichael ZhaoNo ratings yet
- Stationary Layered Solutions For A System of Allen-Cahn Type EquationsDocument28 pagesStationary Layered Solutions For A System of Allen-Cahn Type EquationsLuis Alberto FuentesNo ratings yet
- Handout 1Document16 pagesHandout 1Chadwick BarclayNo ratings yet
- Global Stochastic Synchronization of Chaotic OscillatorsDocument6 pagesGlobal Stochastic Synchronization of Chaotic OscillatorsBit32No ratings yet
- The Influence of The Lorenz System Fractionality oDocument5 pagesThe Influence of The Lorenz System Fractionality oJulexy AntonellaNo ratings yet
- A Duality Principle For The Entanglement Entropy of Free Fermion SystemsDocument12 pagesA Duality Principle For The Entanglement Entropy of Free Fermion SystemsCroco AliNo ratings yet
- The Behavior of Dynamic Systems: 1.0 Where Are We in The Course?Document15 pagesThe Behavior of Dynamic Systems: 1.0 Where Are We in The Course?Mariaa Angeles StewartNo ratings yet
- Nonlinear Vibrations PDFDocument20 pagesNonlinear Vibrations PDFmenguemengueNo ratings yet
- Possible Questions Exam Non-Equilibrium Statistical MechanicsDocument4 pagesPossible Questions Exam Non-Equilibrium Statistical MechanicsEgop3105No ratings yet
- Applications of Dynamical SystemsDocument32 pagesApplications of Dynamical SystemsAl VlearNo ratings yet
- Solvability, Controllability, and Observability of Singular SystemsDocument20 pagesSolvability, Controllability, and Observability of Singular SystemsjavbejaranoNo ratings yet
- DC TC 600 L, 01.00, enDocument61 pagesDC TC 600 L, 01.00, enDarkNo ratings yet
- Drug Treatment of AnemiaDocument6 pagesDrug Treatment of Anemiavingul2006No ratings yet
- Geotechnical Module: Powerful Software Featuring Intuitive WorkflowDocument4 pagesGeotechnical Module: Powerful Software Featuring Intuitive WorkflowMuhammadAviCennaNo ratings yet
- Parts List - KTZ411-63Document4 pagesParts List - KTZ411-63Mahmoud ElboraeNo ratings yet
- #5class-8 (Cordova) Chapter-6 SCIENCE Coal and PetroleumDocument2 pages#5class-8 (Cordova) Chapter-6 SCIENCE Coal and PetroleumVivek PatidarNo ratings yet
- Computer Integrated ManufacturingDocument7 pagesComputer Integrated ManufacturingNarendra PalacharlaNo ratings yet
- Mineral Resources: Earth ScienceDocument20 pagesMineral Resources: Earth ScienceRegina Mae Narciso NazarenoNo ratings yet
- 500daysofsummerphilosopy Reflection DraftDocument3 pages500daysofsummerphilosopy Reflection DraftAiralyn SaceNo ratings yet
- Cbse & Ntse: MathematicsDocument397 pagesCbse & Ntse: MathematicsAbhinav BNo ratings yet
- Loop Quantum GravityDocument69 pagesLoop Quantum GravityAnderson BernardiNo ratings yet
- Technical Sheet: Choline Chloride 60% VegetalDocument3 pagesTechnical Sheet: Choline Chloride 60% VegetalAnice CharafNo ratings yet
- B. Inggris Kels IXDocument4 pagesB. Inggris Kels IXANHAS ADVERTISINGNo ratings yet
- Basics For BJJ SC - V3Document20 pagesBasics For BJJ SC - V3Teo Tolo100% (2)
- Quality Testing of Honey StandardsDocument33 pagesQuality Testing of Honey StandardsK. N RaoNo ratings yet
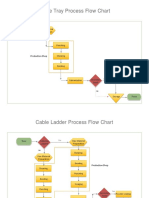
- Process Flow ChartDocument4 pagesProcess Flow Chartchacko chiramalNo ratings yet
- Basic Discrete Structure:: FunctionDocument56 pagesBasic Discrete Structure:: FunctionSamratNo ratings yet
- Level 2 Repair: 7-1. Components On The Rear CaseDocument8 pagesLevel 2 Repair: 7-1. Components On The Rear CaseNguyễn Duy LinhNo ratings yet
- Internship ReportDocument33 pagesInternship Reportstreamingmedia786No ratings yet
- Syllabus 2020Document4 pagesSyllabus 2020asdfghjklNo ratings yet
- Jaguar Land-Rover: A Customer Centric OrganizationDocument15 pagesJaguar Land-Rover: A Customer Centric OrganizationAnmol Shukla100% (1)
- Micom P44X: Numerical Distance Protection RelayDocument80 pagesMicom P44X: Numerical Distance Protection RelayKuenley TiNy OndeNo ratings yet
- Quick Manual v2.3: Advanced LTE Terminal With Flexible Inputs ConfigurationDocument16 pagesQuick Manual v2.3: Advanced LTE Terminal With Flexible Inputs ConfigurationanditowillyNo ratings yet
- Area and Circumference of CircleDocument17 pagesArea and Circumference of CircleJared VallesNo ratings yet
- FM 4 Fluid Kinematics CompleteDocument48 pagesFM 4 Fluid Kinematics Completeالياس يونس مرغلانيNo ratings yet
- Band 2 eDocument58 pagesBand 2 eIonaş Claudia Ramona100% (1)
- Grove RT422 22T PDFDocument4 pagesGrove RT422 22T PDFJulio QuilarqueNo ratings yet
- Reservoir SedimentationDocument20 pagesReservoir SedimentationKathlienNo ratings yet
- Four Course Meal Plan and BudgetDocument5 pagesFour Course Meal Plan and BudgetPemphoNo ratings yet
- Edwin A. Winckler. Political AnthropologyDocument87 pagesEdwin A. Winckler. Political AnthropologyGabriela Herrera MonrroyNo ratings yet
- STK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverDocument11 pagesSTK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverGerardo WarmerdamNo ratings yet