You might also like
- STK 6713 BMK 4Document10 pagesSTK 6713 BMK 4KST5No ratings yet
- LA4225 SanyoElectricDocument3 pagesLA4225 SanyoElectricFariborz SadeghivafaNo ratings yet
- 5W Monaural Power Amplifier: Audio Output For TV ApplicationDocument3 pages5W Monaural Power Amplifier: Audio Output For TV ApplicationJose DelmarNo ratings yet
- 15 W 2-Channel BTL AF Power Amplifier For Car Stereos: 3109-SIP18HDocument9 pages15 W 2-Channel BTL AF Power Amplifier For Car Stereos: 3109-SIP18HErnane OliveiraNo ratings yet
- 17-W, 2-Channel BTL AF High-Efficiency Power Amplifier ICDocument10 pages17-W, 2-Channel BTL AF High-Efficiency Power Amplifier ICជើងកាង ភូមិNo ratings yet
- STK4191V SanyoDocument5 pagesSTK4191V SanyoEric BackstromNo ratings yet
- STK401-110 AF Power Amplifier (Split Power Supply) Technical DocumentationDocument8 pagesSTK401-110 AF Power Amplifier (Split Power Supply) Technical DocumentationKyaw San OoNo ratings yet
- 3107-SIP13H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocument20 pages3107-SIP13H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersJose BenavidesNo ratings yet
- 4A PWM Controlled Unipolar Stepper Motor Driver Using STK672-740 - Electronics-LabDocument26 pages4A PWM Controlled Unipolar Stepper Motor Driver Using STK672-740 - Electronics-LabEngr. Saqib SohailNo ratings yet
- LA4705Document8 pagesLA4705ជើងកាង ភូមិNo ratings yet
- 3031A-SIP-5H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocument8 pages3031A-SIP-5H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersHamza AbbasiNo ratings yet
- STK4221 AF Power Amplifier (Split Power Supply) (80W + 80W Min, THD 0.4%)Document6 pagesSTK4221 AF Power Amplifier (Split Power Supply) (80W + 80W Min, THD 0.4%)Vitorio LogoNo ratings yet
- STK4181 AF Power Amplifier (Split Power Supply) (45W + 45W Min, THD 0.08%)Document8 pagesSTK4181 AF Power Amplifier (Split Power Supply) (45W + 45W Min, THD 0.08%)João Carlos EspindolaNo ratings yet
- STK 4181 VDocument8 pagesSTK 4181 VYonatan ChanNo ratings yet
- Data SheetDocument2 pagesData SheetCengiz ZorgörmezNo ratings yet
- Efficient 4-Channel 50W Car Audio Amplifier ICDocument3 pagesEfficient 4-Channel 50W Car Audio Amplifier ICEdgarNo ratings yet
- TSM101/A: Voltage and Current ControllerDocument13 pagesTSM101/A: Voltage and Current ControllerRaka Satria PradanaNo ratings yet
- STK4182IIPDFDocument9 pagesSTK4182IIPDFRaquel SantacruzNo ratings yet
- STK4141 AF Power Amplifier (Split Power Supply) (25W + 25W Min, THD 0.08%)Document5 pagesSTK4141 AF Power Amplifier (Split Power Supply) (25W + 25W Min, THD 0.08%)Goran Ristic-RileNo ratings yet
- Sanyo stk433-090 PDFDocument6 pagesSanyo stk433-090 PDFPedro ParraNo ratings yet
- 4-Channel BTL Power Amplifier For Car Audio Systems: Monolithic Linear ICDocument11 pages4-Channel BTL Power Amplifier For Car Audio Systems: Monolithic Linear ICEdinaldo GuimaraesNo ratings yet
- IC Power Salida de AudioDocument6 pagesIC Power Salida de Audioenrique chavezNo ratings yet
- Features Output Current: 1A High Output Voltage Precision: 1 High Input Voltage: 35VDocument5 pagesFeatures Output Current: 1A High Output Voltage Precision: 1 High Input Voltage: 35VDaniela GarciaNo ratings yet
- SDC7500 enDocument7 pagesSDC7500 enodelaineNo ratings yet
- Datasheet l6506dDocument8 pagesDatasheet l6506dSIELAB C.A.No ratings yet
- STK4192II SchematicsDocument8 pagesSTK4192II SchematicsEric BackstromNo ratings yet
- 3109-SIP18H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocument9 pages3109-SIP18H: SANYO Electric Co.,Ltd. Semiconductor Bussiness Headquartersជើងកាង ភូមិNo ratings yet
- STK4161 AF Power Amplifier (Split Power Supply) (35W + 35W Min, THD 0.08%)Document8 pagesSTK4161 AF Power Amplifier (Split Power Supply) (35W + 35W Min, THD 0.08%)nguyendiepsonganNo ratings yet
- STK4432 AF Power Amplifier (25W + 25W Min, THD 1.0%) : Features Package DimensionsDocument8 pagesSTK4432 AF Power Amplifier (25W + 25W Min, THD 1.0%) : Features Package DimensionsandrelloliveiraNo ratings yet
- STK4211V: 2-Channel 70 W Min AF Power Amplifier (Split Power Supply)Document3 pagesSTK4211V: 2-Channel 70 W Min AF Power Amplifier (Split Power Supply)mundomusicalmeriaNo ratings yet
- STK673-010 3-Phase Stepping Motor Driver (Sine Wave Drive) Output Current 2.4ADocument16 pagesSTK673-010 3-Phase Stepping Motor Driver (Sine Wave Drive) Output Current 2.4AMzsenna Opcional MzsennaNo ratings yet
- BD9882F, FVDocument5 pagesBD9882F, FVbahti1284No ratings yet
- LA4225Document3 pagesLA4225francisco lucenaNo ratings yet
- FLM358 FCI - AlldatasheetDocument7 pagesFLM358 FCI - AlldatasheetRobson SoaresNo ratings yet
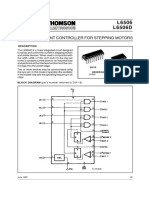
- Current Controller For Stepping Motors: DescriptionDocument8 pagesCurrent Controller For Stepping Motors: DescriptionNuno FilipeNo ratings yet
- Single Timer: Features DescriptionDocument13 pagesSingle Timer: Features DescriptionSonal GuptaNo ratings yet
- Single Timer: Features DescriptionDocument13 pagesSingle Timer: Features DescriptionSonal GuptaNo ratings yet
- DP8600C YwDocument9 pagesDP8600C YwSURESH CHANDRA ROUTNo ratings yet
- STK4151 AF Power Amplifier (Split Power Supply) (30W + 30W Min, THD 0.08%)Document6 pagesSTK4151 AF Power Amplifier (Split Power Supply) (30W + 30W Min, THD 0.08%)CADASEDANo ratings yet
- AF Power Amplifier (Split Power Supply) (25 W Min, THD 0.4 %)Document4 pagesAF Power Amplifier (Split Power Supply) (25 W Min, THD 0.4 %)Hadi Nur LettoNo ratings yet
- Package Dimensions: Power Brushless Motor Predriver IC For OA ApplicationsDocument12 pagesPackage Dimensions: Power Brushless Motor Predriver IC For OA ApplicationsHojas VientoNo ratings yet
- STK401-090 50W Audio Amp Spec SheetDocument10 pagesSTK401-090 50W Audio Amp Spec SheetHERNANDO A BECERRANo ratings yet
- Vn16Bsp: Iso High Side Smart Power Solid State RelayDocument12 pagesVn16Bsp: Iso High Side Smart Power Solid State Relaymohammed el azhariNo ratings yet
- soldadora UTC3843DDocument9 pagessoldadora UTC3843DChristian ormeñoNo ratings yet
- 2-Phase Stepping Motor Driver: Thick-Film Hybrid ICDocument23 pages2-Phase Stepping Motor Driver: Thick-Film Hybrid ICKaland RoboNo ratings yet
- La4450 DDocument8 pagesLa4450 DJbk-hpNo ratings yet
- PDF SANYO 436764Document9 pagesPDF SANYO 436764Joel VSNo ratings yet
- STK4036 AF Power Amplifier (Split Power Supply) (50W Min, THD 0.4%)Document3 pagesSTK4036 AF Power Amplifier (Split Power Supply) (50W Min, THD 0.4%)mundomusicalmeriaNo ratings yet
- Quad Timer: Features DescriptionDocument6 pagesQuad Timer: Features DescriptionCajun LeBeauNo ratings yet
- 6.0 W AF Power Amplifier For Home Stereo, TV Use: 3075-SIP7HDocument4 pages6.0 W AF Power Amplifier For Home Stereo, TV Use: 3075-SIP7HVictor LabranqueNo ratings yet
- LV8112VBDocument15 pagesLV8112VBDawood AhmedNo ratings yet
- STK400 040 PDFDocument9 pagesSTK400 040 PDFMarcos Ivan SanabriaNo ratings yet
- LA4183 Monolithic AmpDocument11 pagesLA4183 Monolithic AmpRoberto MendesNo ratings yet
- Bay Linear Current Mode PWM Controller SpecificationsDocument11 pagesBay Linear Current Mode PWM Controller SpecificationsShashikant PatilNo ratings yet
- 10W Hybrid IC AmplifierDocument6 pages10W Hybrid IC AmplifierLuis Eduardo TaveraNo ratings yet
- KA558 FairchildSemiconductor PDFDocument6 pagesKA558 FairchildSemiconductor PDFCajun LeBeauNo ratings yet
- Current Mode PWMDocument9 pagesCurrent Mode PWMluis albertoNo ratings yet
- Ka3882/3/4/5 Smps Controller: Current Mode PWM ControllerDocument6 pagesKa3882/3/4/5 Smps Controller: Current Mode PWM Controllerjoil alvesNo ratings yet
- Bent Wood Shelves Without SteamDocument13 pagesBent Wood Shelves Without SteamRenee Jones100% (7)
- Dana 24Document7 pagesDana 24Homo Deux100% (1)
- Poor BoyDocument11 pagesPoor BoyGerardo WarmerdamNo ratings yet
- Apr 12 2020Document2 pagesApr 12 2020Gerardo WarmerdamNo ratings yet
- Bending Solid Wood To FormDocument39 pagesBending Solid Wood To Formbcooper477No ratings yet
- Bent Wood Shelves Without SteamDocument13 pagesBent Wood Shelves Without SteamRenee Jones100% (7)
- TDA4865AJDocument18 pagesTDA4865AJArmando GonzalezNo ratings yet
- Bluetooth Module GuideDocument13 pagesBluetooth Module GuideJaime Leonardo CruzNo ratings yet
- Steam Bending Qualities of Eight Timber Species of Ghana: January 2011Document15 pagesSteam Bending Qualities of Eight Timber Species of Ghana: January 2011Gerardo WarmerdamNo ratings yet
- Octal Buffer/Line Driver with 3-State Outputs DatasheetDocument9 pagesOctal Buffer/Line Driver with 3-State Outputs Datasheetnlb53No ratings yet
- STK672 080Document18 pagesSTK672 080Gerardo WarmerdamNo ratings yet
- 4047Document27 pages4047rcarlosrsNo ratings yet
- TDA8947JDocument24 pagesTDA8947JrrebollarNo ratings yet
- Datasheet l298bDocument14 pagesDatasheet l298bgioganNo ratings yet
- STK4162IIDocument9 pagesSTK4162IIFredy Reinaldo Rivera MartínezNo ratings yet
- STK4162IIDocument9 pagesSTK4162IIFredy Reinaldo Rivera MartínezNo ratings yet
- Welding ReportDocument13 pagesWelding ReportNordiana IdrisNo ratings yet
- Design and Simulation of Half Wave Rectifier On MATLABDocument29 pagesDesign and Simulation of Half Wave Rectifier On MATLABAhmed Ahmed MohamedNo ratings yet
- Chapter 3-Part 2 - Angle ModulationDocument34 pagesChapter 3-Part 2 - Angle Modulationyohans shegawNo ratings yet
- Conductors of Heat and ElectricityDocument20 pagesConductors of Heat and ElectricityMarianne Francisco100% (1)
- Electronics IDocument9 pagesElectronics IVikram RaoNo ratings yet
- DTU 4th SEM RESULTSDocument33 pagesDTU 4th SEM RESULTSamansamaiyarNo ratings yet
- Electronics 100 Important MCQ PDFDocument22 pagesElectronics 100 Important MCQ PDFRaghu Veer KNo ratings yet
- Submitted by Anubhab Mohanty Reg No-0901106225 Electrical EnggDocument21 pagesSubmitted by Anubhab Mohanty Reg No-0901106225 Electrical EnggNaveen VatsalNo ratings yet
- Recycling Old Car Radio Into A Audio AmplifierDocument42 pagesRecycling Old Car Radio Into A Audio AmplifierJorge MartínezNo ratings yet
- M35 Knig9404 Ism C35 PDFDocument26 pagesM35 Knig9404 Ism C35 PDFnorma_jeannNo ratings yet
- SE QG Fronius Symo and PVSyst Ond Pan Guide en USDocument3 pagesSE QG Fronius Symo and PVSyst Ond Pan Guide en USJose Maria SartoNo ratings yet
- Reciprocating Saw V28Sx/Vv28Ck In2Document4 pagesReciprocating Saw V28Sx/Vv28Ck In2Jafar AhmedNo ratings yet
- Sumo Robot PCB AssemblyDocument15 pagesSumo Robot PCB AssemblyBayu Kresna WiratamaNo ratings yet
- Ul508a SCCR enDocument10 pagesUl508a SCCR enoladipoo1No ratings yet
- Module Week 9Document2 pagesModule Week 9Maria Christina ManzanoNo ratings yet
- An Impedance Source Multi-Level Three Phase Inverter With Common Mode Voltage Elimination and Dead Time CompensationDocument18 pagesAn Impedance Source Multi-Level Three Phase Inverter With Common Mode Voltage Elimination and Dead Time CompensationRadu GodinaNo ratings yet
- Datacenter Build QuotationDocument12 pagesDatacenter Build Quotationritesh_aladdinNo ratings yet
- Air Core ToroidDocument10 pagesAir Core ToroidChandra ShettyNo ratings yet
- 1265e-201 Elec Main Schematic - T2Document1 page1265e-201 Elec Main Schematic - T2Rangga SetaNo ratings yet
- NEW I-LINE H CatalogueDocument60 pagesNEW I-LINE H CatalogueKenyDuyệtNo ratings yet
- Potato PowerDocument5 pagesPotato Powerਵਿਸ਼ਾਲ ਬਾਂਸਲNo ratings yet
- Motion Mountain - Vol. 3 - Light, Charges and Brains - The Adventure of PhysicsDocument455 pagesMotion Mountain - Vol. 3 - Light, Charges and Brains - The Adventure of Physicsmotionmountain92% (12)
- Bajaj Type Test - 15100046-Test ReportDocument2 pagesBajaj Type Test - 15100046-Test ReportCHakuNo ratings yet
- Micrologic Selection GuideDocument8 pagesMicrologic Selection GuideNuengruthai WeerawattanaNo ratings yet
- Philips NTRX505Document28 pagesPhilips NTRX505EulerMartinsDeMelloNo ratings yet
- Basic Electronics 10ELN15-25 NotesDocument146 pagesBasic Electronics 10ELN15-25 Noteskmpshastry88% (8)
- AP Physics C: Electricity and Magnetism - Electrostatics ReviewDocument17 pagesAP Physics C: Electricity and Magnetism - Electrostatics ReviewDarkAgesGamerVNo ratings yet
- 14 Panel 8k Sys - XLSX - QuotationDocument2 pages14 Panel 8k Sys - XLSX - Quotationdani mhannaNo ratings yet