0% found this document useful (0 votes)
451 views45 pagesCAN-FD for Automotive Engineers
Driver assistance systems help save lives by using sensors to detect objects and dangers around the vehicle. These systems analyze the vehicle's surroundings and can warn the driver or take actions like emergency braking to avoid collisions. CAN-FD is a protocol that allows for faster data transmission rates and larger data payloads compared to traditional CAN, enabling advanced driver assistance systems to process more sensor data.
Uploaded by
tarakram2809Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
451 views45 pagesCAN-FD for Automotive Engineers
Driver assistance systems help save lives by using sensors to detect objects and dangers around the vehicle. These systems analyze the vehicle's surroundings and can warn the driver or take actions like emergency braking to avoid collisions. CAN-FD is a protocol that allows for faster data transmission rates and larger data payloads compared to traditional CAN, enabling advanced driver assistance systems to process more sensor data.
Uploaded by
tarakram2809Copyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
- Overview: Provides a general introduction to CAN-FD and its comparison with Classical CAN, detailing its features and advantages.
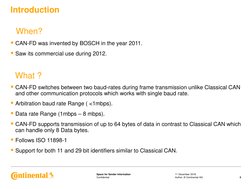
- Introduction: Explains the history and functional capacity of CAN-FD, highlighting its development by BOSCH and key protocol differences.
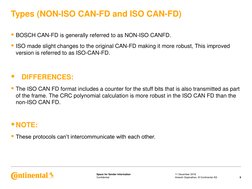
- Types of frames: Differentiates between NON-ISO CAN-FD and ISO CAN-FD frames and their interoperability issues.
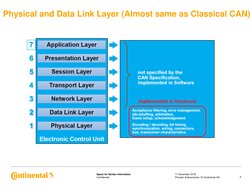
- Physical and Data Link Layer: Describes the architecture of CAN layers, emphasizing similarities to Classical CAN and particular layers involved in CAN-FD.
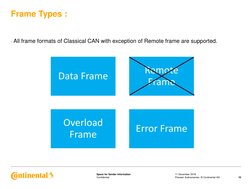
- Frame Formats: Details various frame types supported by CAN-FD, contrasting them with Classical CAN frame functionalities.
- Bit timings: Examines the bit timing configurations essential for CAN-FD operation, including data and nominal bit rates.
- Error Handling: Discusses error handling mechanisms within CAN-FD, including error frames and conditions.
- Register Configuration: Explains the necessary register configurations for CAN-FD, comparing them with Classical CAN setups.
- Migration: Covers the transition from Classical CAN to CAN-FD, focusing on physical, hardware, and software changes required.
- CAN-FD in Diagnostics: Describes the application of CAN-FD in diagnostic processes and how it enhances data handling efficiencies.
- CAN-FD in Flashing: Examines the benefits of using CAN-FD for flashing processes, including examples and potential time savings.
- Microcontroller Support: Lists various microcontrollers and transceivers that support CAN-FD, showcasing compatibility across devices.
- Vector Hardware Support: Highlights the Vector hardware systems that support CAN-FD, indicating market availability.
- CAN-FD Database file walkthrough: Provides an overview of the CAN-FD database file, emphasizing its structure and application.
- CANOE Configuration Demo: Demonstrates CAN-FD configuration within CANOE software, detailing step-by-step setup.
- Questions: Offers a Q&A section addressing potential questions about CAN-FD integration in Classical CAN networks.