You might also like
- National Interest Waiver Software EngineerDocument15 pagesNational Interest Waiver Software EngineerFaha JavedNo ratings yet
- Robocode AdvanceDocument19 pagesRobocode AdvancekhiemNo ratings yet
- 001 Physics AssignmentDocument28 pages001 Physics AssignmentRicky JayNo ratings yet
- 70-486 Exams Study Guides Practice 2019Document37 pages70-486 Exams Study Guides Practice 2019Sherry watsonNo ratings yet
- Probation Period ReportDocument17 pagesProbation Period ReportMiranti Puspitasari0% (1)
- EMT05-Lesson 2Document72 pagesEMT05-Lesson 2cutiepieNo ratings yet
- Final Exam 1. What Is The Difference Between A Robot Project and A Virtual Instrument?Document19 pagesFinal Exam 1. What Is The Difference Between A Robot Project and A Virtual Instrument?api-322201343No ratings yet
- Full Speed Ahead - Activity SheetsDocument4 pagesFull Speed Ahead - Activity Sheetsapi-239713715No ratings yet
- Movement ChallengeDocument6 pagesMovement ChallengeBarbara Denisse IrulaNo ratings yet
- Worksheet RoboticsDocument4 pagesWorksheet Roboticsapi-239713189No ratings yet
- Full Speed AheadDocument3 pagesFull Speed Aheadapi-239713542No ratings yet
- Worksheet - Rull Speed AheadDocument4 pagesWorksheet - Rull Speed Aheadapi-233727526No ratings yet
- Loop There It IsDocument94 pagesLoop There It IsEthan BenoitNo ratings yet
- Homeworkassignment 2Document2 pagesHomeworkassignment 2api-313058499No ratings yet
- Lesson 2 5 Minute BotDocument9 pagesLesson 2 5 Minute Botapi-273620669No ratings yet
- Rover ConstructionDocument19 pagesRover ConstructionNicolas Del BuonoNo ratings yet
- 004 Zeeshan AiprDocument26 pages004 Zeeshan Aipr26- Amal SathyanNo ratings yet
- Robotics TPDocument15 pagesRobotics TPzineb benjellounNo ratings yet
- Catia Pi Q&aDocument5 pagesCatia Pi Q&aHimanshu KapseNo ratings yet
- Lesson 2 - Driving For Distance - Moving Forward and in Reverse QuizDocument1 pageLesson 2 - Driving For Distance - Moving Forward and in Reverse QuizBarbara Denisse IrulaNo ratings yet
- Beginner Programming Lesson: Port View & Using Sensor DataDocument8 pagesBeginner Programming Lesson: Port View & Using Sensor DataZyber Dcode SirRodNo ratings yet
- Be 1200 Final ReportDocument13 pagesBe 1200 Final Reportapi-281375188No ratings yet
- Marked Work-Sheet Full Speed AheadDocument4 pagesMarked Work-Sheet Full Speed Aheadapi-233276394No ratings yet
- How To Model Support Bracket in Inventor 2011 - GrabCADDocument8 pagesHow To Model Support Bracket in Inventor 2011 - GrabCADAndy MezetaNo ratings yet
- Chapter 3 Review: Introduction To Drawing and Editing Name: Click Here and Type Your NameDocument3 pagesChapter 3 Review: Introduction To Drawing and Editing Name: Click Here and Type Your NamebinoNo ratings yet
- (Selector) .Animate ( (Styles), Speed, Easing, Callback) : Midterm Quiz1Document11 pages(Selector) .Animate ( (Styles), Speed, Easing, Callback) : Midterm Quiz1jane jabarNo ratings yet
- Port ViewDocument8 pagesPort ViewRasha Al KhatibNo ratings yet
- Lec 9Document9 pagesLec 9Mohammed KhazalNo ratings yet
- Unity QuaternionsDocument6 pagesUnity QuaternionsErick OrtizNo ratings yet
- AutoCAD VIVADocument6 pagesAutoCAD VIVADeva RajNo ratings yet
- Addey - A2. Robotics - Driving Base - Set Movement and Turning LabDocument2 pagesAddey - A2. Robotics - Driving Base - Set Movement and Turning LabMohannad AlyNo ratings yet
- Worksheet2 Rightface2013Document3 pagesWorksheet2 Rightface2013api-239712567No ratings yet
- Autocad Interview Questions For Freshers: AnswerDocument7 pagesAutocad Interview Questions For Freshers: Answersaqeeb100% (2)
- Seon Joo Final 2Document14 pagesSeon Joo Final 2Shin PhanNo ratings yet
- Plan, Design, and Compete in Robo Rally!Document63 pagesPlan, Design, and Compete in Robo Rally!leshea JOHNNo ratings yet
- Obstacle Avoidance - Duino-RoboticsDocument5 pagesObstacle Avoidance - Duino-RoboticsEmmanuel MecanosaurioNo ratings yet
- Question and Answers: ClarificationDocument5 pagesQuestion and Answers: ClarificationLukeNo ratings yet
- Written Directions For EV3 Line Follow PDFDocument23 pagesWritten Directions For EV3 Line Follow PDFEvandro Andrade100% (1)
- Robotic Shoe PolisherDocument16 pagesRobotic Shoe Polisherapi-233164756No ratings yet
- Lesson 1 - IntroductionDocument27 pagesLesson 1 - IntroductionSaarahNo ratings yet
- Moving Forward: Code DissectionDocument6 pagesMoving Forward: Code DissectionUzziel Navarrete BautistaNo ratings yet
- Element 1 Learning The Basics ScratchDocument3 pagesElement 1 Learning The Basics Scratchapi-281115195No ratings yet
- World of AnimationDocument42 pagesWorld of Animationankur BoraNo ratings yet
- Conclusion QuestionsDocument2 pagesConclusion Questionsapi-261172777No ratings yet
- Discussion Groups: Tutorial - Animating With Inventor StudioDocument3 pagesDiscussion Groups: Tutorial - Animating With Inventor Studiobhaskarghsh4No ratings yet
- Rocket Project Reflection Math OnlyDocument5 pagesRocket Project Reflection Math Onlyapi-644628044No ratings yet
- Top 50 AutoCAD Interview Questions and Answers PDFDocument6 pagesTop 50 AutoCAD Interview Questions and Answers PDFPkay TandohNo ratings yet
- Worksheet3 Claponclapoff2013Document2 pagesWorksheet3 Claponclapoff2013api-239713754No ratings yet
- 061BCT3y2pGraphics 3DMaze Final ReportDocument11 pages061BCT3y2pGraphics 3DMaze Final ReportSubash ParajuliNo ratings yet
- RobotBASIC TutorialDocument7 pagesRobotBASIC Tutorialaloksahu1No ratings yet
- Rectangular Waveguide Tutorial - CST2013 MWS Examples PDFDocument22 pagesRectangular Waveguide Tutorial - CST2013 MWS Examples PDFshyam gopal yadavNo ratings yet
- CATIA Interview QuesionsDocument64 pagesCATIA Interview Quesionshariganesh697556No ratings yet
- 9223644809867444-Computing With Minecraft - Unit 2 - City PlannerDocument22 pages9223644809867444-Computing With Minecraft - Unit 2 - City PlannerAlya Al-MasaeedNo ratings yet
- Bourret ScratchProgrammingDocument43 pagesBourret ScratchProgrammingjosef100% (1)
- An Introduction To Programming With Scratch: Ronald BourretDocument43 pagesAn Introduction To Programming With Scratch: Ronald BourretHazem Osman 2512No ratings yet
- RPA Interview Question BankDocument82 pagesRPA Interview Question BankYessy TrottaNo ratings yet
- Lesson 2 Robot CodingDocument20 pagesLesson 2 Robot CodingFC 9989No ratings yet
- Robotics and Automation Lab Report No.5 by Waqas Salman (F18604022)Document15 pagesRobotics and Automation Lab Report No.5 by Waqas Salman (F18604022)Waqas SalmanNo ratings yet
- Presentation Introduction To Virtual Reality in SimulinkDocument19 pagesPresentation Introduction To Virtual Reality in SimulinkRodrigue Tchamna0% (1)
- Autodesk ConstraintsDocument16 pagesAutodesk ConstraintsrkoGearNo ratings yet
- RAPID Basic CommandsDocument21 pagesRAPID Basic CommandsasdNo ratings yet
- The Essence of Technology Is by No Means Anything TechnologicalDocument22 pagesThe Essence of Technology Is by No Means Anything TechnologicalJerstine Airah SumadsadNo ratings yet
- Cash Flow July 2021Document25 pagesCash Flow July 2021pratima jadhavNo ratings yet
- Church and Community Mobilization (CCM)Document15 pagesChurch and Community Mobilization (CCM)FreethinkerTianNo ratings yet
- Aditya Academy Syllabus-II 2020Document7 pagesAditya Academy Syllabus-II 2020Tarun MajumdarNo ratings yet
- Work Energy Power SlidesDocument36 pagesWork Energy Power Slidessweehian844100% (1)
- Chapter 11 AssignmentDocument2 pagesChapter 11 AssignmentsainothegamerNo ratings yet
- Table of Reinforcement Anchorage Length & Lap Length - Eurocode 2Document7 pagesTable of Reinforcement Anchorage Length & Lap Length - Eurocode 2NgJackyNo ratings yet
- .IAF-GD5-2006 Guide 65 Issue 3Document30 pages.IAF-GD5-2006 Guide 65 Issue 3bg_phoenixNo ratings yet
- Abnt NBR 16868 1 Alvenaria Estrutural ProjetoDocument77 pagesAbnt NBR 16868 1 Alvenaria Estrutural ProjetoGIOVANNI BRUNO COELHO DE PAULANo ratings yet
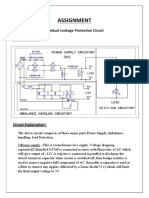
- Assignment: Residual Leakage Protection Circuit Circuit DiagramDocument2 pagesAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaNo ratings yet
- Template Budget ProposalDocument4 pagesTemplate Budget ProposalimamNo ratings yet
- IJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyDocument12 pagesIJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyImpact JournalsNo ratings yet
- CL Honours Report NamanDocument11 pagesCL Honours Report NamanNaman VermaNo ratings yet
- Nominal GroupDocument3 pagesNominal GroupSrourNo ratings yet
- FS-1040 FS-1060DN: Parts ListDocument23 pagesFS-1040 FS-1060DN: Parts List1980cvvrNo ratings yet
- Installing Surge Protective Devices With NEC Article 240 and Feeder Tap RuleDocument2 pagesInstalling Surge Protective Devices With NEC Article 240 and Feeder Tap RuleJonathan Valverde RojasNo ratings yet
- Electronic Diversity Visa ProgrambDocument1 pageElectronic Diversity Visa Programbsamkimari5No ratings yet
- Chapter 01 What Is Statistics?Document18 pagesChapter 01 What Is Statistics?windyuriNo ratings yet
- Supply List & Resource Sheet: Granulation Techniques DemystifiedDocument6 pagesSupply List & Resource Sheet: Granulation Techniques DemystifiedknhartNo ratings yet
- Mahindra&mahindraDocument95 pagesMahindra&mahindraAshik R GowdaNo ratings yet
- Misc 8DNL 8MPL 8MPN B PDFDocument41 pagesMisc 8DNL 8MPL 8MPN B PDFVesica PiscesNo ratings yet
- CE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Document6 pagesCE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Angelice Alliah De la CruzNo ratings yet
- Dog & Kitten: XshaperDocument17 pagesDog & Kitten: XshaperAll PrintNo ratings yet
- Kübler 5800-5820 - enDocument5 pagesKübler 5800-5820 - enpomsarexnbNo ratings yet
- The Pneumatics of Hero of AlexandriaDocument5 pagesThe Pneumatics of Hero of Alexandriaapi-302781094No ratings yet
- AYUMJADocument1 pageAYUMJASoumet Das SoumetNo ratings yet
- Michael Clapis Cylinder BlocksDocument5 pagesMichael Clapis Cylinder Blocksapi-734979884No ratings yet
- TIA Guidelines SingaporeDocument24 pagesTIA Guidelines SingaporeTahmidSaanidNo ratings yet