You might also like
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Paper 8Document6 pagesPaper 8Daniel G Canton PuertoNo ratings yet
- Adaptive Inverse Optimal Control of A Magnetic Levitation SystemDocument17 pagesAdaptive Inverse Optimal Control of A Magnetic Levitation Systemkj185No ratings yet
- Neural Network Implementation of Nonlinear Receding-Horizon ControlDocument7 pagesNeural Network Implementation of Nonlinear Receding-Horizon ControlGarudaOzoNo ratings yet
- Nonlinear Rescaling of Control Laws With Application To Stabilization in The Presence of Magnitude SaturationDocument32 pagesNonlinear Rescaling of Control Laws With Application To Stabilization in The Presence of Magnitude SaturationMayank SethiNo ratings yet
- On The Stability of Constrained MPC Without Terminal ConstraintDocument5 pagesOn The Stability of Constrained MPC Without Terminal ConstraintShamik MisraNo ratings yet
- Limiting average cost control problems in stochastic systemsDocument13 pagesLimiting average cost control problems in stochastic systemsLuis Alberto FuentesNo ratings yet
- Paper 31Document6 pagesPaper 31Daniel G Canton PuertoNo ratings yet
- Observer-Based Robust H-Infinity Control for Uncertain Switched SystemsDocument7 pagesObserver-Based Robust H-Infinity Control for Uncertain Switched Systemsghassen marouaniNo ratings yet
- Recurrent Neural Network Modeling For Model Predictive ControlDocument31 pagesRecurrent Neural Network Modeling For Model Predictive ControlMahbod SinakiNo ratings yet
- Nonlinear and Adaptive Control: An Abbreviated Status ReportDocument15 pagesNonlinear and Adaptive Control: An Abbreviated Status ReportOwais KhanNo ratings yet
- N MPC 56 PassivityDocument12 pagesN MPC 56 PassivityBRIDGET AUHNo ratings yet
- Automatic ControlDocument14 pagesAutomatic Controlmagdi elmalekNo ratings yet
- Linear Feedback ControlDocument14 pagesLinear Feedback ControlHung TuanNo ratings yet
- Stochastic Feedback Controller Design Considering The Dual EffectDocument13 pagesStochastic Feedback Controller Design Considering The Dual EffectsandeepNo ratings yet
- Global Stochastic Synchronization of Chaotic OscillatorsDocument6 pagesGlobal Stochastic Synchronization of Chaotic OscillatorsBit32No ratings yet
- 没有稳定约束的连续时间模型预测控制的递归可行性Document6 pages没有稳定约束的连续时间模型预测控制的递归可行性咸水鱼No ratings yet
- InTech-A New Kind of Nonlinear Model Predictive Control Algorithm Enhanced by Control Lyapunov FunctionsDocument28 pagesInTech-A New Kind of Nonlinear Model Predictive Control Algorithm Enhanced by Control Lyapunov FunctionsArviandy AribowoNo ratings yet
- Lyapunov Stability Analysis of Mass-Spring System with FrictionDocument27 pagesLyapunov Stability Analysis of Mass-Spring System with FrictionGrecia GarciaNo ratings yet
- Reliability Analysis of Large Structural SystemsDocument5 pagesReliability Analysis of Large Structural Systemsuamiranda3518No ratings yet
- Neural Network Based Model Reference Adaptive Control For Ship Steering SystemDocument8 pagesNeural Network Based Model Reference Adaptive Control For Ship Steering SystemdharshanirymondNo ratings yet
- Adaptive Nonlinear Control: A Lyapunov ApproachDocument13 pagesAdaptive Nonlinear Control: A Lyapunov ApproachLuis Salazar ChavezNo ratings yet
- TPWL IeeeDocument6 pagesTPWL Ieeezhi.han1091No ratings yet
- Distributed Receding Horizon Control of Coupled Nonlinear SystemsDocument7 pagesDistributed Receding Horizon Control of Coupled Nonlinear SystemsBaba JeeNo ratings yet
- Any Domain of Attraction For A Linear Constrained System Is A Tracking Domain of AttractionDocument26 pagesAny Domain of Attraction For A Linear Constrained System Is A Tracking Domain of AttractiontiagoalvesaiNo ratings yet
- Paolo Zuliani - Quantum Programming With Mixed StatesDocument11 pagesPaolo Zuliani - Quantum Programming With Mixed StatesGholsasNo ratings yet
- Reinforcement Learning Control of Robot Manipulators in Uncertain EnvironmentsDocument6 pagesReinforcement Learning Control of Robot Manipulators in Uncertain EnvironmentsVehid TavakolNo ratings yet
- Introduction To MPC Controllers: L. Valverde and Rosa 2012 D.Limon and E.F.Camacho 2005Document5 pagesIntroduction To MPC Controllers: L. Valverde and Rosa 2012 D.Limon and E.F.Camacho 2005hassanalabasiNo ratings yet
- Cortez 和 Dimarogonas - 2022 - On Compatibility and Region of Attraction for SafeDocument8 pagesCortez 和 Dimarogonas - 2022 - On Compatibility and Region of Attraction for SafeAo AoNo ratings yet
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlsaeedNo ratings yet
- Multisensor Target Tracking With Delayed StatesDocument5 pagesMultisensor Target Tracking With Delayed StatesAnindha ParthyNo ratings yet
- 1 s2.0 S1474667016427060 MainDocument6 pages1 s2.0 S1474667016427060 MainSamir AhmedNo ratings yet
- s14 CompletareDocument14 pagess14 CompletareLaura NicoletaNo ratings yet
- Hybrid Kalman-fuzzy fusion detects sensor faultsDocument7 pagesHybrid Kalman-fuzzy fusion detects sensor faultsPonciano Jorge Escamilla-AmbrosioNo ratings yet
- 2002 Papachristodoulou PrajnaDocument6 pages2002 Papachristodoulou PrajnaJéssica Cunha PinheiroNo ratings yet
- Anew Method For Generation Shedding and Load Shedding in Power System Emergency ControlDocument6 pagesAnew Method For Generation Shedding and Load Shedding in Power System Emergency Controlapi-3697505No ratings yet
- New Extended LMI Characterization For State Feedback Control of Continuous-Time Uncertain Linear SystemsDocument6 pagesNew Extended LMI Characterization For State Feedback Control of Continuous-Time Uncertain Linear SystemsBouazizi HechmiNo ratings yet
- Backstepping Design for Flight Path Angle ControlDocument6 pagesBackstepping Design for Flight Path Angle ControlMartina SORNo ratings yet
- On The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian MelbourneDocument22 pagesOn The Implementation of The 0-1 Test For Chaos: Georg A. Gottwald Ian Melbourneherwins.stocksNo ratings yet
- From Classical To State-Feedback-Based Controllers: Lecture NotesDocument10 pagesFrom Classical To State-Feedback-Based Controllers: Lecture Notesomarportillo123456No ratings yet
- On The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-FeedbackDocument6 pagesOn The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-Feedbackmjksh62No ratings yet
- Stabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlDocument5 pagesStabilization of An Inverted Pendulum Via Fuzzy Explicit Predictive ControlVirgili0No ratings yet
- Nonlinear Programming Based Sliding Mode Control of An Inverted PendulumDocument5 pagesNonlinear Programming Based Sliding Mode Control of An Inverted Pendulumvirus101No ratings yet
- State Estimation of NonLinear System Through Particle Filter Based Recurrent Neural NetworksDocument6 pagesState Estimation of NonLinear System Through Particle Filter Based Recurrent Neural NetworksRoop ChandanNo ratings yet
- Stable Adaptive Reconfigurable Flight Control With Self-DiagnosticsDocument6 pagesStable Adaptive Reconfigurable Flight Control With Self-DiagnosticsAnirudh IndanaNo ratings yet
- Robust Pointwise Min-Norm Control of Distributed Systems With Fluid FlowDocument6 pagesRobust Pointwise Min-Norm Control of Distributed Systems With Fluid FlowdgsdfjkgdfjksnNo ratings yet
- Stable Fourier Neural Networks With Application To Modeling Lettuce GrowthDocument6 pagesStable Fourier Neural Networks With Application To Modeling Lettuce GrowthToprak AlemNo ratings yet
- A Control Perspective For Centralized and Distributed Convex OptimizationDocument6 pagesA Control Perspective For Centralized and Distributed Convex Optimizationzxfeng168163.comNo ratings yet
- Kamel 2017Document37 pagesKamel 2017jingNo ratings yet
- Introducción PiazzaDocument33 pagesIntroducción PiazzanadiaNo ratings yet
- Constrained Model Predictive Control StaDocument26 pagesConstrained Model Predictive Control StaBRIDGET AUHNo ratings yet
- Sliding Mode Controller Design For The Anti-Synchronization of Identical Hyperchaotic Newton-Leipnik SystemsDocument10 pagesSliding Mode Controller Design For The Anti-Synchronization of Identical Hyperchaotic Newton-Leipnik SystemsijitcsNo ratings yet
- C022 ObserverSmoothBoundedInput 5thIEEE MedCCS97 PaphosDocument11 pagesC022 ObserverSmoothBoundedInput 5thIEEE MedCCS97 PaphosCostanzo ManesNo ratings yet
- Using Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachDocument7 pagesUsing Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachmxjoeNo ratings yet
- Global convergence of trust-region SQP filter algorithmDocument25 pagesGlobal convergence of trust-region SQP filter algorithmAndressa PereiraNo ratings yet
- Lyapunov Controller Inverted PendulumDocument6 pagesLyapunov Controller Inverted Pendulumle duc huynhNo ratings yet
- Inverse Cubature and Quadrature Kalman Filters for Nonlinear State EstimationDocument6 pagesInverse Cubature and Quadrature Kalman Filters for Nonlinear State Estimations_bhaumikNo ratings yet
- Doyle 1978Document2 pagesDoyle 1978mayankgarg333No ratings yet
- Feedback Stabilization Via Rational Control Lyapunov FunctionsDocument6 pagesFeedback Stabilization Via Rational Control Lyapunov FunctionsSaeb AmirAhmadi ChomacharNo ratings yet
- LevineDocument59 pagesLevinesaipavan999No ratings yet
- Reduced and Zero Emission Operations: Energy Storage & Fuel CellsDocument20 pagesReduced and Zero Emission Operations: Energy Storage & Fuel CellshinsermuNo ratings yet
- Control in LabVIEW PDFDocument104 pagesControl in LabVIEW PDFJuan PabloNo ratings yet
- Ieee Scada PracticeDocument49 pagesIeee Scada PracticehinsermuNo ratings yet
- Implementation of Optimization-Based Power Management For All-Electric Hybrid VesselsDocument17 pagesImplementation of Optimization-Based Power Management For All-Electric Hybrid VesselshinsermuNo ratings yet
- Process Control Fundamentals ReviewDocument24 pagesProcess Control Fundamentals ReviewhinsermuNo ratings yet
- Process Control Handout New1Document19 pagesProcess Control Handout New1hinsermuNo ratings yet
- ScadaDocument420 pagesScadaVictor Farias GuerreroNo ratings yet
- Block Diagram Reduction PDFDocument9 pagesBlock Diagram Reduction PDFhinsermuNo ratings yet
- PWM Techniques: A Pure Sine Wave InverterDocument91 pagesPWM Techniques: A Pure Sine Wave InverterAndrei BiroNo ratings yet
- Automatic Control System S Hasan SaeedDocument295 pagesAutomatic Control System S Hasan SaeedYogesh Suthar90% (103)
- CS Tutorial Matlab CompleteDocument86 pagesCS Tutorial Matlab CompletehinsermuNo ratings yet
- Electrical Measurements and Measuring InstrumentsDocument317 pagesElectrical Measurements and Measuring InstrumentsbenwkgNo ratings yet
- Ac Machine WindingsDocument12 pagesAc Machine Windingsabenet bekele100% (2)
- Capter 1Document35 pagesCapter 1hinsermuNo ratings yet
- MODBUS in Process Control PDFDocument8 pagesMODBUS in Process Control PDFmanjunath8685No ratings yet
- Best Int ControlDocument77 pagesBest Int ControlhinsermuNo ratings yet
- IUC University Portsmouth Accounting Books CatalogDocument3 pagesIUC University Portsmouth Accounting Books Cataloghinsermu100% (1)
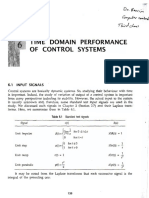
- 6 Control in Time Domain PDFDocument16 pages6 Control in Time Domain PDFhinsermuNo ratings yet
- Number Systems, Operations and Codes Harmonization - 2Document60 pagesNumber Systems, Operations and Codes Harmonization - 2hinsermuNo ratings yet
- Lecture1 IntroductionDocument27 pagesLecture1 IntroductionhinsermuNo ratings yet
- PID Controller - Sós Márton NMH - IVDocument7 pagesPID Controller - Sós Márton NMH - IVhinsermuNo ratings yet
- Three Basic Forms: G G G G G GDocument20 pagesThree Basic Forms: G G G G G GhinsermuNo ratings yet
- Automatic Control System S Hasan SaeedDocument295 pagesAutomatic Control System S Hasan SaeedYogesh Suthar90% (103)
- Synopsis-Time Operated Solar Tracking System - ABHINAV SRIDocument12 pagesSynopsis-Time Operated Solar Tracking System - ABHINAV SRIAbhinav SrivastavNo ratings yet
- Micro Controller Based Solar TrackerDocument26 pagesMicro Controller Based Solar TrackerParas DoshiNo ratings yet
- Solar TrackerDocument18 pagesSolar Trackerhinsermu100% (1)
- Block Diagram ReductionDocument9 pagesBlock Diagram ReductionhinsermuNo ratings yet
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDocument15 pagesLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuNo ratings yet
- Formation Damage and Horizontal WellsDocument14 pagesFormation Damage and Horizontal WellsAdhi100% (1)
- Aaron Chavez: 161110001@upmh - Edu.mx 442 259 0158Document3 pagesAaron Chavez: 161110001@upmh - Edu.mx 442 259 0158Aarón ChávezNo ratings yet
- Flow Diagram, Equipment and Tag IdentificationDocument24 pagesFlow Diagram, Equipment and Tag Identificationmkpq100% (1)
- Catalogo Bridas IberoSteelDocument13 pagesCatalogo Bridas IberoSteeljuan evodio gutierrez madrigalNo ratings yet
- Physiology MCQDocument3 pagesPhysiology MCQDr Md Abedur Rahman90% (10)
- Find Correlation and Regression Between TV Ad Spend and SalesDocument5 pagesFind Correlation and Regression Between TV Ad Spend and SalesTARVEEN DuraiNo ratings yet
- Cambridge Pre-U: Further Mathematics 9795/01Document4 pagesCambridge Pre-U: Further Mathematics 9795/01charlesmccoyiNo ratings yet
- GEN SPQ RN MSM6280 Based Firmware Release FW2.4.6 v12 F2Document32 pagesGEN SPQ RN MSM6280 Based Firmware Release FW2.4.6 v12 F2djnhh0an100% (1)
- PLC Based Solar Panel With Tilting Arrangement: April 2016Document9 pagesPLC Based Solar Panel With Tilting Arrangement: April 2016Paul TodericNo ratings yet
- Application Note For Customized CellsDocument13 pagesApplication Note For Customized Cellsxian liuNo ratings yet
- Pelton Turbine ReportDocument10 pagesPelton Turbine ReportShea Cheng Kuang100% (2)
- Introduction To Bioinformatics: Database Search (FASTA)Document35 pagesIntroduction To Bioinformatics: Database Search (FASTA)mahedi hasanNo ratings yet
- 8Document3 pages8samson amsaluNo ratings yet
- NS 6145 Laser and LightDocument69 pagesNS 6145 Laser and LightMeesixNo ratings yet
- CA - AssignmentReport - 2050020Document10 pagesCA - AssignmentReport - 2050020MINH NGUYỄN TÔNNo ratings yet
- Learning To Learn by Gradient Descent by Gradient DescentDocument10 pagesLearning To Learn by Gradient Descent by Gradient DescentAnkit BiswasNo ratings yet
- Siahaan V. Data Science Crash Course... With Python GUI 2ed 2023Document610 pagesSiahaan V. Data Science Crash Course... With Python GUI 2ed 2023ArturNo ratings yet
- Jurimetrics 1Document24 pagesJurimetrics 1Maiko Lesmana D0% (1)
- JVC RX Es1slDocument20 pagesJVC RX Es1slvideosonNo ratings yet
- Cleaning Validation-Repassa PatrickDocument12 pagesCleaning Validation-Repassa PatrickIin Tirta SunartaNo ratings yet
- BIT Baroda Institute of Technology: Creo (Pro/ENGINEER) Training atDocument4 pagesBIT Baroda Institute of Technology: Creo (Pro/ENGINEER) Training atNIRALINo ratings yet
- PS3 Prompt Explained With Examples in LinuxDocument2 pagesPS3 Prompt Explained With Examples in LinuxSaka KelyNo ratings yet
- Treumann R.a., Baum Johann W. Advanced Space Plasma Physics (WS, 1997) (ISBN 1860940269) (388s) - PPLDocument388 pagesTreumann R.a., Baum Johann W. Advanced Space Plasma Physics (WS, 1997) (ISBN 1860940269) (388s) - PPLtarwor100% (1)
- Data Communication: Lecturer: Tamanna Haque NipaDocument20 pagesData Communication: Lecturer: Tamanna Haque NipaAlokTripathiNo ratings yet
- MCQ Questions For Class 10 Science Electricity With Answers: Run Windows On MacDocument3 pagesMCQ Questions For Class 10 Science Electricity With Answers: Run Windows On Macshashank srivastavaNo ratings yet
- Series: Instruction Manual Digital TheodoliteDocument64 pagesSeries: Instruction Manual Digital TheodoliteJhon Smit Gonzales UscataNo ratings yet
- Toshiba Qosmio x70-A Quanta Bdd Da0bddmb8h0 Rev a1a СхемаDocument37 pagesToshiba Qosmio x70-A Quanta Bdd Da0bddmb8h0 Rev a1a СхемаDeyan ProynovNo ratings yet
- Drowsy Driving A Look at The Monitoring and Detection SystemDocument4 pagesDrowsy Driving A Look at The Monitoring and Detection SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- BE Information Technology 0Document655 pagesBE Information Technology 0virendra giraseNo ratings yet
- T5L 400 PR221DS-LS/I in 400 3p F FDocument3 pagesT5L 400 PR221DS-LS/I in 400 3p F FLê Xuân ĐịnhNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (54)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- AI Money Machine: Unlock the Secrets to Making Money Online with AIFrom EverandAI Money Machine: Unlock the Secrets to Making Money Online with AINo ratings yet
- 100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesFrom Everand100+ Amazing AI Image Prompts: Expertly Crafted Midjourney AI Art Generation ExamplesNo ratings yet
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- How to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.From EverandHow to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.No ratings yet
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)