You might also like
- Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesFrom EverandAutonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesNo ratings yet
- Design, Fabrication, and Performance Test of A Hovering-Based Flapping-Wing Micro Air Vehicle Capable of Sustained and Controlled FlightDocument8 pagesDesign, Fabrication, and Performance Test of A Hovering-Based Flapping-Wing Micro Air Vehicle Capable of Sustained and Controlled FlightOlasco OmoolaNo ratings yet
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentFrom EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo ratings yet
- Flapping Flight For Biomimetic Robotic Insects: Part I-System ModelingDocument13 pagesFlapping Flight For Biomimetic Robotic Insects: Part I-System ModelingPhạm Quốc BảoNo ratings yet
- Biomimetics 07 00207Document17 pagesBiomimetics 07 00207MIGUEL ANGEL VICENTE CANAVIRINo ratings yet
- Longitudinal Flight Dynamic Analysis On Vertical Takeoff of A Tailless Flapping-Wing Micro Air VehicleDocument15 pagesLongitudinal Flight Dynamic Analysis On Vertical Takeoff of A Tailless Flapping-Wing Micro Air Vehiclechandra sekharNo ratings yet
- Vector Field Aided Trajectory Tracking by A 10 Gram Flapping Wing Micro Aerial VehicleDocument8 pagesVector Field Aided Trajectory Tracking by A 10 Gram Flapping Wing Micro Aerial Vehiclechandra sekharNo ratings yet
- A Review of Design and Fabrication of The Bionic Flapping Wing Micro Air VehiclesDocument20 pagesA Review of Design and Fabrication of The Bionic Flapping Wing Micro Air VehiclesMohan S kumarNo ratings yet
- Jben D 21 00124Document25 pagesJben D 21 00124chandra sekharNo ratings yet
- Shape Memory Alloyglass Fiber Woven Composite For Soft Morphing Winglets of Unmanned Aerial VehiclesDocument11 pagesShape Memory Alloyglass Fiber Woven Composite For Soft Morphing Winglets of Unmanned Aerial Vehiclesjohn mtzNo ratings yet
- Airfoil Selection Procedure, Wind Tunnel Experimentation and Implementation of 6DOF Modeling On A Flying Wing Micro Aerial VehicleDocument31 pagesAirfoil Selection Procedure, Wind Tunnel Experimentation and Implementation of 6DOF Modeling On A Flying Wing Micro Aerial VehicleMol MolNo ratings yet
- 1 s2.0 S1000936120301205 MainDocument12 pages1 s2.0 S1000936120301205 MainAysha SherinNo ratings yet
- Ornithopter Flight Simulation Based On Flexible Multi-Body DynamicsDocument10 pagesOrnithopter Flight Simulation Based On Flexible Multi-Body DynamicsWl CsoNo ratings yet
- Adaptive Fault-Tolerant Control of A Hybrid Canard Rotor Wing UAV Under Transition Flight Subject To Actuator Faults and Model UncertaintiesDocument16 pagesAdaptive Fault-Tolerant Control of A Hybrid Canard Rotor Wing UAV Under Transition Flight Subject To Actuator Faults and Model UncertaintiesSalman IjazNo ratings yet
- Bi Plane MAVDocument4 pagesBi Plane MAVYathishYmNo ratings yet
- Finite Time Formation Tracking Control With Collis - 2020 - Journal of The FrankDocument42 pagesFinite Time Formation Tracking Control With Collis - 2020 - Journal of The FrankBogdan BungardiNo ratings yet
- S D UAV S - M C Wing: Tructural Esign of EMI Onoque OmpositeDocument9 pagesS D UAV S - M C Wing: Tructural Esign of EMI Onoque OmpositemacitusNo ratings yet
- Design and Construction of A Novel QuadDocument23 pagesDesign and Construction of A Novel QuadAbdul Haseeb ShahNo ratings yet
- Ms 12 603 2021Document11 pagesMs 12 603 2021chandra sekharNo ratings yet
- Flapping Wings With PVDF Sensors To Modify The Aerodynamic Forces of A Micro Aerial VehicleDocument9 pagesFlapping Wings With PVDF Sensors To Modify The Aerodynamic Forces of A Micro Aerial VehiclePrapto PraptNo ratings yet
- Ujme2 15112978 PDFDocument10 pagesUjme2 15112978 PDFdosabikNo ratings yet
- Design and Analysis of An Unmanned Aerial Vehicle Capable of Carrying The CameraDocument10 pagesDesign and Analysis of An Unmanned Aerial Vehicle Capable of Carrying The CameradosabikNo ratings yet
- Submit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesDocument13 pagesSubmit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesÜmit Müfit GüzeyNo ratings yet
- Tilt Wing Model Design PDFDocument23 pagesTilt Wing Model Design PDFpadmanabhanrameshNo ratings yet
- 2019 - Attitude and Cruise Control of A VTOL Tiltwing UAVDocument8 pages2019 - Attitude and Cruise Control of A VTOL Tiltwing UAVahmad.yasser123456No ratings yet
- Vtol Design PDFDocument25 pagesVtol Design PDFElner CrystianNo ratings yet
- InTech-Flapping Wings With Micro Sensors and Flexible Framework To Modify The Aerodynamic Forces of A Micro Aerial Vehicle MavDocument29 pagesInTech-Flapping Wings With Micro Sensors and Flexible Framework To Modify The Aerodynamic Forces of A Micro Aerial Vehicle MavedwardsilvaNo ratings yet
- Design and Research of UAV Autonomous Grasping System: Juntong Qi, Jinan Kang, Xiang LuDocument6 pagesDesign and Research of UAV Autonomous Grasping System: Juntong Qi, Jinan Kang, Xiang LuАртем РябиновNo ratings yet
- Controlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorDocument11 pagesControlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorJoe ReninNo ratings yet
- Design and Aerodynamic Optimization of A Tri-Tilt RotorDocument22 pagesDesign and Aerodynamic Optimization of A Tri-Tilt RotorSourav SangamNo ratings yet
- Collision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control AlgorithmDocument11 pagesCollision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control Algorithmphantuan8antNo ratings yet
- The Three-Dimensional Flow Simulation of A Flapping WingDocument12 pagesThe Three-Dimensional Flow Simulation of A Flapping Wingchandra sekharNo ratings yet
- Experimental Modal Analysis of A Small UDocument7 pagesExperimental Modal Analysis of A Small U紀俞揚No ratings yet
- Electronics 11 04187 v2Document33 pagesElectronics 11 04187 v2mm123No ratings yet
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocument4 pagesTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryNo ratings yet
- 2 PBDocument13 pages2 PBAbdul MajidNo ratings yet
- Design of A Drone With A Robotic End-EffectorDocument8 pagesDesign of A Drone With A Robotic End-EffectorRisira Erantha KannangaraNo ratings yet
- Irjet V7i8156Document5 pagesIrjet V7i8156yogesh yogeNo ratings yet
- ISA Transactions: M. Rida Mokhtari, Amal Choukchou Braham, Brahim CherkiDocument14 pagesISA Transactions: M. Rida Mokhtari, Amal Choukchou Braham, Brahim CherkiSaad HadjiNo ratings yet
- AdHoc Networks SI R2 FinalDocument29 pagesAdHoc Networks SI R2 FinalBoubacar SimporeNo ratings yet
- Kamel 2019Document12 pagesKamel 2019Edmund Luke Benedict SimpsonNo ratings yet
- Applied Sciences: Design of Wing Root Rotation Mechanism For Dragonfly-Inspired Micro Air VehicleDocument18 pagesApplied Sciences: Design of Wing Root Rotation Mechanism For Dragonfly-Inspired Micro Air VehicleAyesha GuptaNo ratings yet
- Design and Construction of A Novel Quad Tilt-Wing UAVDocument23 pagesDesign and Construction of A Novel Quad Tilt-Wing UAVKyle NhuNo ratings yet
- Design of A Proportional-Integral Controller To Track Pitch Angle in A Mini Aerial VehicleDocument10 pagesDesign of A Proportional-Integral Controller To Track Pitch Angle in A Mini Aerial Vehicleأبو هشامNo ratings yet
- Applied SciencesDocument16 pagesApplied SciencesnarinderNo ratings yet
- Bird-Mimetic Wing System of Flapping-Wing Micro Air Vehicle With Autonomous Flight Control CapabilityDocument10 pagesBird-Mimetic Wing System of Flapping-Wing Micro Air Vehicle With Autonomous Flight Control CapabilityJulianaRinconLopezNo ratings yet
- V Tail MAV ReportDocument46 pagesV Tail MAV ReportRodriguez ArthursNo ratings yet
- Adaptive Backstepping Ight Control For A mini-UAVDocument18 pagesAdaptive Backstepping Ight Control For A mini-UAVoussama sadkiNo ratings yet
- A Geometric Method of Hoverability Analysis For Multirotor Uavs With Upward-Oriented RotorsDocument15 pagesA Geometric Method of Hoverability Analysis For Multirotor Uavs With Upward-Oriented RotorsarbitNo ratings yet
- Mathematical Model of Aircraft Wake Vortices Development For Take-Off - Landing Phases For Wake Vortex Safety SystemsDocument8 pagesMathematical Model of Aircraft Wake Vortices Development For Take-Off - Landing Phases For Wake Vortex Safety Systemscalcule-à-tortNo ratings yet
- Bejgerowski 2009Document9 pagesBejgerowski 2009Hosein PahlavanNo ratings yet
- Pitching Moment Generation in An Insect-Mimicking Flapping-Wing SystemDocument16 pagesPitching Moment Generation in An Insect-Mimicking Flapping-Wing SystemRAJARATNANo ratings yet
- Relative Position-Based Collision Avoidance System For Swarming UAVS Using Multi-Sensor FusionDocument7 pagesRelative Position-Based Collision Avoidance System For Swarming UAVS Using Multi-Sensor FusionmiguelNo ratings yet
- A Simulation and Design Tool For A Passive Rotation Flapping Wing MechanismDocument12 pagesA Simulation and Design Tool For A Passive Rotation Flapping Wing MechanismpopisNo ratings yet
- Aerodynamics and Control of Autonomous Quadrotor Helicopters in Aggressive ManeuveringDocument6 pagesAerodynamics and Control of Autonomous Quadrotor Helicopters in Aggressive ManeuveringtiagopnNo ratings yet
- Parachute Dynamics and Perturbation AnalysisDocument12 pagesParachute Dynamics and Perturbation AnalysisPAWEE KORNNo ratings yet
- Quadrotor PDFDocument11 pagesQuadrotor PDFMo'menKhaledNo ratings yet
- Simulation of A Fixed-Wing UAV Forced La PDFDocument10 pagesSimulation of A Fixed-Wing UAV Forced La PDFbang nguyen dinhNo ratings yet
- Simulation of A Fixed-Wing UAV Forced La PDFDocument10 pagesSimulation of A Fixed-Wing UAV Forced La PDFbang nguyen dinhNo ratings yet
- Asadi2021 Article Fault-TolerantTrajectoryTrackiDocument14 pagesAsadi2021 Article Fault-TolerantTrajectoryTrackiYaser NabaviNo ratings yet
- Trajectory Tracking Control For Flapping-Wing UAV Based On Model-Free Predictive ControlDocument8 pagesTrajectory Tracking Control For Flapping-Wing UAV Based On Model-Free Predictive Controlchandra sekharNo ratings yet
- Fire 05 00075 v2Document13 pagesFire 05 00075 v2chandra sekharNo ratings yet
- Drones 03 00017Document16 pagesDrones 03 00017chandra sekharNo ratings yet
- US8453962Document41 pagesUS8453962chandra sekharNo ratings yet
- A Conceptual Design of A Firefighter DroneDocument5 pagesA Conceptual Design of A Firefighter Dronechandra sekharNo ratings yet
- 5ee39f48d79c8 IJAR-31141Document16 pages5ee39f48d79c8 IJAR-31141chandra sekharNo ratings yet
- Overview of Engineering Fire Protection Solutions in StructuresDocument6 pagesOverview of Engineering Fire Protection Solutions in Structureschandra sekharNo ratings yet
- The Three-Dimensional Flow Simulation of A Flapping WingDocument12 pagesThe Three-Dimensional Flow Simulation of A Flapping Wingchandra sekharNo ratings yet
- Jben D 21 00124Document25 pagesJben D 21 00124chandra sekharNo ratings yet
- Lect 04Document22 pagesLect 04Beam MoonNo ratings yet
- Application & Registration Form MSC International Business Management M2Document11 pagesApplication & Registration Form MSC International Business Management M2Way To Euro Mission Education ConsultancyNo ratings yet
- TD 3.6 L4 TCD 3.6 L4: Operation ManualDocument72 pagesTD 3.6 L4 TCD 3.6 L4: Operation ManualMajd50% (2)
- WS Soln 2 6A RationalFunctionsDocument6 pagesWS Soln 2 6A RationalFunctionsSiddhant ShahNo ratings yet
- Flight Eticket - PdfaaaDocument3 pagesFlight Eticket - PdfaaaIgnacio Gonzalez PastranoNo ratings yet
- 2.21 - Hazard Identification Form - Fall ProtectionDocument3 pages2.21 - Hazard Identification Form - Fall ProtectionSn AhsanNo ratings yet
- Microsoft Power Platform Adoption PlanningDocument84 pagesMicrosoft Power Platform Adoption PlanningcursurilemeleNo ratings yet
- Sim5360 Atc en v0.19Document612 pagesSim5360 Atc en v0.19Thanks MarisaNo ratings yet
- Computer Systems Servicing NC II CGDocument238 pagesComputer Systems Servicing NC II CGRickyJeciel100% (2)
- Oman Vision 2040 Vision Document 8Document27 pagesOman Vision 2040 Vision Document 8Abdul Aziz AlbalushiNo ratings yet
- 0x08. C - RecursionDocument13 pages0x08. C - RecursionElyousoufi hakim0% (1)
- Pravin Raut Sanjay Raut V EDDocument122 pagesPravin Raut Sanjay Raut V EDSandeep DashNo ratings yet
- Rtcclient Tool Quick Guide: Date Jan. 25, 2011Document3 pagesRtcclient Tool Quick Guide: Date Jan. 25, 2011curzNo ratings yet
- Motion For Forensic Examination - Cyber CasedocxDocument5 pagesMotion For Forensic Examination - Cyber CasedocxJazz Tracey100% (1)
- Vanderbeck Solman ch01-10Document156 pagesVanderbeck Solman ch01-10Jelly AceNo ratings yet
- Aegps Manual Fluxpower Hpi Installation enDocument44 pagesAegps Manual Fluxpower Hpi Installation enAbdus SalamNo ratings yet
- Kendra Penningroth 8-08Document2 pagesKendra Penningroth 8-08api-355965189No ratings yet
- Step by Step Dilr Preparation GuideDocument22 pagesStep by Step Dilr Preparation GuideVishakha TNo ratings yet
- IT2840D 3640D Copier Operation ManualDocument516 pagesIT2840D 3640D Copier Operation ManualChristopher CollinsNo ratings yet
- Gas Extra Inc LTD.-MT103 MD-PGL Draft-WbDocument10 pagesGas Extra Inc LTD.-MT103 MD-PGL Draft-WbwayneNo ratings yet
- Solve A Second-Order Differential Equation Numerically - MATLAB SimulinkDocument2 pagesSolve A Second-Order Differential Equation Numerically - MATLAB Simulinkmohammedshaiban000No ratings yet
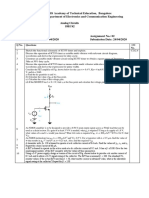
- Q No. Questions CO No.: C C W That Results in GDocument2 pagesQ No. Questions CO No.: C C W That Results in GSamarth SamaNo ratings yet
- Tutorial EllothDocument15 pagesTutorial EllothLepota SvetaNo ratings yet
- Rai Work Experience SheetDocument2 pagesRai Work Experience Sheetmark langcayNo ratings yet
- FDD SRM & NDGDocument3 pagesFDD SRM & NDGEnd EndNo ratings yet
- Microwave Engineering MCC121, 7.5hec, 2014: Passive DevicesDocument47 pagesMicrowave Engineering MCC121, 7.5hec, 2014: Passive DevicesBruno AlvimNo ratings yet
- Gardner Gary ResumeDocument1 pageGardner Gary ResumeGary GardnerNo ratings yet
- قدرة تحمل التربةDocument3 pagesقدرة تحمل التربةjaleelNo ratings yet
- Bafb1023 Microeconomics (Open Book Test)Document4 pagesBafb1023 Microeconomics (Open Book Test)Hareen JuniorNo ratings yet
- Suite Popular Brasileira: 5. Shorinho Heitor Villa-LobosDocument4 pagesSuite Popular Brasileira: 5. Shorinho Heitor Villa-Loboshuong trinhNo ratings yet
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)