You might also like
- IV Semester EED Time Response Analysis Transfer FunctionsDocument4 pagesIV Semester EED Time Response Analysis Transfer FunctionsNitin GoyalNo ratings yet
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88No ratings yet
- Problem 2Document4 pagesProblem 2Jade Do0% (1)
- acs_2013s1_assn1Document6 pagesacs_2013s1_assn1MiraelNo ratings yet
- acs_2012s2_assn1Document6 pagesacs_2012s2_assn1MiraelNo ratings yet
- VI Sem ECEDocument12 pagesVI Sem ECESenthil Kumar KrishnanNo ratings yet
- LDCS QuestionsDocument10 pagesLDCS QuestionsRiya SinghNo ratings yet
- Computer Science Textbook Solutions - 32Document7 pagesComputer Science Textbook Solutions - 32acc-expertNo ratings yet
- TUTORIAL 6 - System ResponseDocument15 pagesTUTORIAL 6 - System ResponsetiraNo ratings yet
- Tutorial questions feedback control systemsDocument2 pagesTutorial questions feedback control systemsOlaniran Matthew OlawaleNo ratings yet
- CS ASS2 (13-17batch)Document3 pagesCS ASS2 (13-17batch)Anonymous yO7rcec6vuNo ratings yet
- Matlab, Simulink - Control Systems Simulation Using Matlab and SimulinkDocument10 pagesMatlab, Simulink - Control Systems Simulation Using Matlab and SimulinkTarkes DoraNo ratings yet
- Part BDocument2 pagesPart BNithyaa SathishNo ratings yet
- Control System Question BankDocument12 pagesControl System Question Banksagar R RaoNo ratings yet
- AssignmentDocument12 pagesAssignmentSamuel TanNo ratings yet
- EC602 Control Q Bank 2023Document9 pagesEC602 Control Q Bank 2023ROHAN CHOWDHURYNo ratings yet
- Lect Note 1 IntroDocument28 pagesLect Note 1 IntroJie RongNo ratings yet
- CONTROL THEORY EXERCISESDocument184 pagesCONTROL THEORY EXERCISESAdel AdenaneNo ratings yet
- Laplace transforms, control systems analysisDocument5 pagesLaplace transforms, control systems analysisduknow2No ratings yet
- EEET2197 Control Systems Tutorial 3Document2 pagesEEET2197 Control Systems Tutorial 3Collin lcwNo ratings yet
- Control SystemsDocument3 pagesControl SystemsselvajothiNo ratings yet
- EEET2197 Tute2Document2 pagesEEET2197 Tute2Collin lcwNo ratings yet
- HW1Document3 pagesHW1Anshu Singh0% (1)
- Assignment one regular AAIT 2022Document6 pagesAssignment one regular AAIT 2022tsegaye2321No ratings yet
- Control System Descriptive Type QuestionsDocument2 pagesControl System Descriptive Type QuestionsAlka Goyal100% (1)
- Closed-loop control system block diagramDocument41 pagesClosed-loop control system block diagramTing SamuelNo ratings yet
- EC6405-Control Systems EngineeringDocument12 pagesEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNo ratings yet
- Tutorial 5Document2 pagesTutorial 5Gaurav ANo ratings yet
- I & PC-Model QuestionsDocument5 pagesI & PC-Model QuestionsSAROJ JOSHINo ratings yet
- Tutorial II DesignDocument4 pagesTutorial II Designgeofrey fungoNo ratings yet
- Control System Assignment - 2024Document2 pagesControl System Assignment - 2024Sanjana NetamNo ratings yet
- BE/BTech 4th Sem Control System Engineering 1st Internal AssessmentDocument4 pagesBE/BTech 4th Sem Control System Engineering 1st Internal AssessmentreporterrajiniNo ratings yet
- Control Theory Quiz 1Document5 pagesControl Theory Quiz 1Sundas Khalid100% (1)
- MODELING LINEAR SYSTEMSDocument39 pagesMODELING LINEAR SYSTEMSFreyley LeyvaNo ratings yet
- Control Systems PDFDocument24 pagesControl Systems PDFlum_78No ratings yet
- EEF467 Tutorial Sheet 2Document4 pagesEEF467 Tutorial Sheet 2NK-NGAMNo ratings yet
- EC 2255 Control SystemsDocument5 pagesEC 2255 Control SystemsselvijeganNo ratings yet
- Cairo University Control System Dynamics Problem Set 4Document5 pagesCairo University Control System Dynamics Problem Set 4akhbar elyoum academyNo ratings yet
- Automatic Control ExerciseDocument140 pagesAutomatic Control Exercisetaile1995No ratings yet
- Chap02b.advanced Process Control PDFDocument15 pagesChap02b.advanced Process Control PDFAnthony PattersonNo ratings yet
- Experiment E. Liquid Level Control Using Coupled TanksDocument29 pagesExperiment E. Liquid Level Control Using Coupled Tanks파랑No ratings yet
- Control SystemsDocument8 pagesControl SystemsammukeeruNo ratings yet
- Exercise 3 (Transient Response Analysis)Document2 pagesExercise 3 (Transient Response Analysis)Sampreeti MazumdarNo ratings yet
- Seventh Semester B.Tech. Degree Examination, June 2009 (2003 Scheme) Control Systems (T)Document3 pagesSeventh Semester B.Tech. Degree Examination, June 2009 (2003 Scheme) Control Systems (T)Saneesh KarayilNo ratings yet
- Model Question Paper: B.Tech Degree Examination SIXTH Semester B.Tech Electronics and Instrumentation EngineeringDocument2 pagesModel Question Paper: B.Tech Degree Examination SIXTH Semester B.Tech Electronics and Instrumentation EngineeringFrancis TomyNo ratings yet
- Tut 1Document1 pageTut 1Sakshi GargNo ratings yet
- Poles Selection TheoryDocument6 pagesPoles Selection TheoryRao ZubairNo ratings yet
- EC - CE10 - Control Systems (2) : Test SummaryDocument18 pagesEC - CE10 - Control Systems (2) : Test Summarysaravanababu jayapalNo ratings yet
- UntitledDocument32 pagesUntitledMasudur RahmanNo ratings yet
- rr321303 Advanced Control SystemsDocument8 pagesrr321303 Advanced Control SystemsSRINIVASA RAO GANTANo ratings yet
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Document8 pagesSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyNo ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- Control SystemDocument3 pagesControl SystemVivek MukundanNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Values For Different EnginesDocument2 pagesValues For Different EnginesKiran Jot SinghNo ratings yet
- Engine ClassificationDocument3 pagesEngine ClassificationKiran Jot SinghNo ratings yet
- Examples Of Engines As Per Design And Operating ParametersDocument2 pagesExamples Of Engines As Per Design And Operating ParametersKiran Jot SinghNo ratings yet
- Design ParametersDocument4 pagesDesign ParametersKiran Jot SinghNo ratings yet
- Engine Friction Power P:: Ig B FDocument4 pagesEngine Friction Power P:: Ig B FKiran Jot SinghNo ratings yet
- I/C Engine Numericals Fuel Injection Time & RateDocument3 pagesI/C Engine Numericals Fuel Injection Time & RateKiran Jot SinghNo ratings yet
- Combustion in CI EnginesDocument3 pagesCombustion in CI EnginesKiran Jot SinghNo ratings yet
- Numerical On Different Fuels UsedDocument4 pagesNumerical On Different Fuels UsedKiran Jot SinghNo ratings yet
- Graphs of Engine Speed-VsDocument5 pagesGraphs of Engine Speed-VsKiran Jot SinghNo ratings yet
- Operating ParametersDocument3 pagesOperating ParametersKiran Jot SinghNo ratings yet
- Oracle Bind Peeking Tuning NightmareDocument30 pagesOracle Bind Peeking Tuning NightmarekruemeL1969No ratings yet
- Resolve ManualDocument240 pagesResolve ManualNJ333100% (1)
- 11th Science Maths Answer KeyDocument15 pages11th Science Maths Answer KeyBhavesh AsapureNo ratings yet
- DRIVINGDocument4 pagesDRIVINGMarcelino ZarateNo ratings yet
- Maths Practice Test with Multiple Choice QuestionsDocument8 pagesMaths Practice Test with Multiple Choice QuestionsBernard ChanNo ratings yet
- NanomagnetismDocument32 pagesNanomagnetismMohammad RameezNo ratings yet
- Mark VieDocument4 pagesMark VieWalid Bahi100% (1)
- Average IfDocument22 pagesAverage IfXenia MorenoNo ratings yet
- 1993 Engines Eurovan - 2.5L 5-CylinderDocument20 pages1993 Engines Eurovan - 2.5L 5-Cylinderfrancesco pavanNo ratings yet
- Junta de Expanción Macoga PDFDocument2 pagesJunta de Expanción Macoga PDFRaul SebastiamNo ratings yet
- Why Astrology Is Science: Five Good Reasons: Tapan Das, PH.D., P.EngDocument56 pagesWhy Astrology Is Science: Five Good Reasons: Tapan Das, PH.D., P.EngNikhil TidkeNo ratings yet
- Adaptive Control Introduction Overview ApplicationsDocument185 pagesAdaptive Control Introduction Overview ApplicationsTu DuongNo ratings yet
- Tutorial 8 PDFDocument16 pagesTutorial 8 PDFBharat SaiNo ratings yet
- Suzanne Saroff - Year 9 Exam AnnaDocument1 pageSuzanne Saroff - Year 9 Exam Annaapi-569107627No ratings yet
- Map Grid and Compass RoseDocument3 pagesMap Grid and Compass RosePatricia BelangerNo ratings yet
- High Impedance Fault Detection On Rural Electric Distribution and Power Quality Control SystemsDocument4 pagesHigh Impedance Fault Detection On Rural Electric Distribution and Power Quality Control SystemsGerman MonjeNo ratings yet
- Fluid Mechanics EXERCHAP05Document4 pagesFluid Mechanics EXERCHAP05scribdgggNo ratings yet
- ParkerDocument4 pagesParkerClewerton BagnhukNo ratings yet
- Seal Pot: Seal Fluid Supply TankDocument4 pagesSeal Pot: Seal Fluid Supply Tankmadhu gawadeNo ratings yet
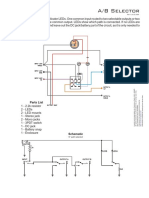
- A/B Selector: Parts ListDocument1 pageA/B Selector: Parts ListGiannis zmNo ratings yet
- Fulltext01 4Document83 pagesFulltext01 4survivalofthepolyNo ratings yet
- SPE-18166-Correlaciones y RegistrosDocument14 pagesSPE-18166-Correlaciones y RegistrosSofiaNo ratings yet
- Tanque: Equipment Data SheetDocument1 pageTanque: Equipment Data SheetAlonso DIAZNo ratings yet
- Aashto Empirical Design MethodologyDocument76 pagesAashto Empirical Design MethodologyzainjoiyaNo ratings yet
- USAS 856.1-1969 Safety Standard for Powered Industrial TrucksDocument65 pagesUSAS 856.1-1969 Safety Standard for Powered Industrial TrucksRethfo A Riquelme Castillo100% (1)
- COA - Unit2 Floating Point Arithmetic 2Document67 pagesCOA - Unit2 Floating Point Arithmetic 2Devika csbsNo ratings yet
- JavaScript Factorial CalculatorDocument13 pagesJavaScript Factorial CalculatorSandipa ShindeNo ratings yet
- Power MOSFET Stage For Boost Converters: I 35 A V 500 V R 0.12Document4 pagesPower MOSFET Stage For Boost Converters: I 35 A V 500 V R 0.12Franklyn AcevedoNo ratings yet
- TM 5-2430-200-10Document196 pagesTM 5-2430-200-10Advocate100% (1)
- Acid Base and Redox Titration CalculationsDocument33 pagesAcid Base and Redox Titration CalculationsoscarbecNo ratings yet