You might also like
- Control Systems Fundamentals: Electric Car Racing SimulationDocument5 pagesControl Systems Fundamentals: Electric Car Racing Simulationezekiel chege0% (1)
- Sea Fastening Desig MannualDocument36 pagesSea Fastening Desig Mannualjamesmec20013588100% (2)
- Physics-12-Ch 11 & 12 & 13-SolnsDocument134 pagesPhysics-12-Ch 11 & 12 & 13-SolnsASUSuserusb0% (2)
- MIT Aircraft Stability and Control 02 - AssignmentsDocument14 pagesMIT Aircraft Stability and Control 02 - AssignmentsAndré Da Luz MoreiraNo ratings yet
- Circular Motion Forces on Ferris Wheel RidersDocument65 pagesCircular Motion Forces on Ferris Wheel Ridersshark 1808No ratings yet
- Part 1Document90 pagesPart 1Saeid SamiezadehNo ratings yet
- ME 304 Control Systems ExercisesDocument58 pagesME 304 Control Systems ExercisesmjdaleneziNo ratings yet
- Adaptive State Controller Swings Up and Balances Inverted PendulumDocument6 pagesAdaptive State Controller Swings Up and Balances Inverted PendulumNeagu AdrianNo ratings yet
- Nonlinear, Adaptive Control System For Payload Extraction OperationsDocument13 pagesNonlinear, Adaptive Control System For Payload Extraction Operationsabraha gebruNo ratings yet
- Spacecraft Inertia Estimation Via Constrained Squares: LeastDocument6 pagesSpacecraft Inertia Estimation Via Constrained Squares: LeastVincenzo PesceNo ratings yet
- Full Control of A QuadrotorDocument6 pagesFull Control of A QuadrotorLuis Orlando Silva VásquezNo ratings yet
- Quadcopter Online Lab-10Document9 pagesQuadcopter Online Lab-10Aryan GargNo ratings yet
- Mode The High-Speed Navigation of Road: VehiclesDocument5 pagesMode The High-Speed Navigation of Road: Vehiclesali_raza117No ratings yet
- 2-DOF Helicopter Controlling by Pole-PlacementsDocument5 pages2-DOF Helicopter Controlling by Pole-PlacementsosdacavNo ratings yet
- Example #1 Forces and Moments On A Beam: Civilfem Manual of Advanced Examples - Ingeciber, S.A.Document19 pagesExample #1 Forces and Moments On A Beam: Civilfem Manual of Advanced Examples - Ingeciber, S.A.Percy Romero MurilloNo ratings yet
- Nonlinear Flight Control of A Two-Degree-of-Freedom Helicopter Using Takagi-Sugeno Fuzzy ModelDocument6 pagesNonlinear Flight Control of A Two-Degree-of-Freedom Helicopter Using Takagi-Sugeno Fuzzy Modelhai zhangNo ratings yet
- Base ExcitationDocument9 pagesBase ExcitationChetan ShaktinagarNo ratings yet
- HomeWork2 MobileRobot Fall2019 PDFDocument4 pagesHomeWork2 MobileRobot Fall2019 PDFWaleed Bin KhalidNo ratings yet
- Lindsey Hines Final Report PDFDocument21 pagesLindsey Hines Final Report PDFclimax1364No ratings yet
- Modeling and Altitude Control of Quad-Rotor UAVDocument6 pagesModeling and Altitude Control of Quad-Rotor UAVescanusNo ratings yet
- Mixed-Objective H2/H∞ Control for EPAS Using LMIDocument2 pagesMixed-Objective H2/H∞ Control for EPAS Using LMIIsmail HussainNo ratings yet
- Dynamic model of robot manipulators using Euler-Lagrange approachDocument65 pagesDynamic model of robot manipulators using Euler-Lagrange approachselvamNo ratings yet
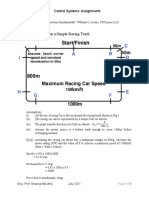
- Electric Car Driven On A Simple Racing Track Kenyatta University Control Systems Assignments 1Document5 pagesElectric Car Driven On A Simple Racing Track Kenyatta University Control Systems Assignments 1bradandrew10No ratings yet
- Christophgruber Mechatronics2012Document8 pagesChristophgruber Mechatronics2012Hamza NasirNo ratings yet
- Euro Sim 2004Document6 pagesEuro Sim 2004Nishant SrivastavaNo ratings yet
- Comparison and Choice of Models in Tracking Target WithDocument6 pagesComparison and Choice of Models in Tracking Target WithsumathyNo ratings yet
- A Simulator Developed For A Twin-Pod AUV, The Marport SQX-500Document6 pagesA Simulator Developed For A Twin-Pod AUV, The Marport SQX-500huy.tranvugia1305No ratings yet
- Chapter 3 - Forced Vibration of Multi-Degree-of-Freedom SystemsDocument4 pagesChapter 3 - Forced Vibration of Multi-Degree-of-Freedom SystemsAnonymous LcR6ykPBTNo ratings yet
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnNo ratings yet
- Theoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatDocument10 pagesTheoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatJuan Santiago Latigo ColliNo ratings yet
- Floating Wind Turbine Motion Assessment: Numerical Simulation Results Compared To Model Test MeasurementsDocument10 pagesFloating Wind Turbine Motion Assessment: Numerical Simulation Results Compared To Model Test MeasurementsRahil KhatriNo ratings yet
- MF2030 Final Exam Solution HT10Document12 pagesMF2030 Final Exam Solution HT10Athul_V_Dev_1688No ratings yet
- (12249718 - Annals of West University of Timisoara - Physics) Quarter Car Suspension System With One Degree of Freedom Simulated Using SimulinkDocument6 pages(12249718 - Annals of West University of Timisoara - Physics) Quarter Car Suspension System With One Degree of Freedom Simulated Using SimulinkCUT nchimwazaNo ratings yet
- Modeling and Control of Active Suspension Using Pismc and SMCDocument10 pagesModeling and Control of Active Suspension Using Pismc and SMCjulioandres2011No ratings yet
- (2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformDocument5 pages(2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformAlex YangNo ratings yet
- E1JSE6 2011 v3n3 174Document7 pagesE1JSE6 2011 v3n3 174Anh NgoNo ratings yet
- Written Problem Set 6Document10 pagesWritten Problem Set 6davparanNo ratings yet
- Nonlinear Control For Trajectory Tracking of A Quadrotor Unmanned VehicleDocument6 pagesNonlinear Control For Trajectory Tracking of A Quadrotor Unmanned Vehicleelguerrero66No ratings yet
- Automobile Suspension Design: Ian Arlen, Paul Gu Enette, & Ariel LevyDocument10 pagesAutomobile Suspension Design: Ian Arlen, Paul Gu Enette, & Ariel LevyHermesNo ratings yet
- Quadcopter Dynamics, Simulation, and ControlDocument18 pagesQuadcopter Dynamics, Simulation, and Controldemos2011No ratings yet
- ME311 Autumn2020 EndSem FinalVersionDocument4 pagesME311 Autumn2020 EndSem FinalVersionVarun PathakNo ratings yet
- Model and Observer-Based Controller Design For A Quanser Helicopter With Two DOFDocument5 pagesModel and Observer-Based Controller Design For A Quanser Helicopter With Two DOFosdacavNo ratings yet
- Fuzzy PID Control For A Cubic Robot Balancing On Its Corner: Xiao-Gang RUAN, Yuan LI and Zhi-Gang CHENDocument8 pagesFuzzy PID Control For A Cubic Robot Balancing On Its Corner: Xiao-Gang RUAN, Yuan LI and Zhi-Gang CHENantonio spalloneNo ratings yet
- Constrained Predictive Control of a Servo-Driven Tracking TurretDocument6 pagesConstrained Predictive Control of a Servo-Driven Tracking TurretVu Duc TruongNo ratings yet
- ABS Data Fusion 2001Document7 pagesABS Data Fusion 2001Nourhan MohamedNo ratings yet
- Flight Control Design Using Backstepping PDFDocument8 pagesFlight Control Design Using Backstepping PDFIvan RamirezNo ratings yet
- Modeling A Two Wheeled Inverted Pendulum RobotDocument59 pagesModeling A Two Wheeled Inverted Pendulum Robotcdsiegert100% (2)
- Quadcopter Full ControlDocument6 pagesQuadcopter Full ControlSandeepsrivatsa100% (1)
- Anti-Swing Control For An Overhead Crane With Fuzzy Compensation X L, W YDocument11 pagesAnti-Swing Control For An Overhead Crane With Fuzzy Compensation X L, W Ytidjani86No ratings yet
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDocument7 pagesDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380No ratings yet
- Airplane Dynamics and Control ModelingDocument27 pagesAirplane Dynamics and Control ModelingysapeNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- P900 Manual.v1.8.7Document114 pagesP900 Manual.v1.8.7Tun Hlaing MinNo ratings yet
- Durandal MB H743schDocument2 pagesDurandal MB H743schashley0% (1)
- Pixhawk4mini PinoutsDocument2 pagesPixhawk4mini PinoutsashleyNo ratings yet
- Document 3Document1 pageDocument 3ashleyNo ratings yet
- Theory Notes of Newton's Laws of Motion For NEET & IIT 2017Document18 pagesTheory Notes of Newton's Laws of Motion For NEET & IIT 2017umved singh yadav90% (10)
- The Physics of The Oceanic Tides - Eugene ButikovDocument24 pagesThe Physics of The Oceanic Tides - Eugene Butikovdelenda3No ratings yet
- Deriving The Equations of MotionDocument4 pagesDeriving The Equations of MotionKarthikeya SrivathsavNo ratings yet
- Hanavan Model FullDocument158 pagesHanavan Model FullEd JonesNo ratings yet
- (2002) Control of A Heavy-Duty Robotic Excavator Using Time Delay Control With Integral Sliding SurfaceDocument15 pages(2002) Control of A Heavy-Duty Robotic Excavator Using Time Delay Control With Integral Sliding Surfacehima012100% (1)
- Special Theory of Relativity ExplainedDocument26 pagesSpecial Theory of Relativity Explainedyohanse mehabawNo ratings yet
- Blade Element TheoryDocument16 pagesBlade Element TheoryVinay KusumanchiNo ratings yet
- Galilean Transformations: Relating Space & Time Coordinates Between FramesDocument13 pagesGalilean Transformations: Relating Space & Time Coordinates Between FramesIjaz Talib-xyzNo ratings yet
- ASTR 610 Theory of Galaxy Formation - Yale UniversityDocument35 pagesASTR 610 Theory of Galaxy Formation - Yale UniversityAnkit KambleNo ratings yet
- General Physics I Lab Report 2Document6 pagesGeneral Physics I Lab Report 2caroline_veazey_1No ratings yet
- EGP MergedDocument1,300 pagesEGP MergedKarinaNo ratings yet
- A First Glimpse On Special Relativity: Prasun DuttaDocument29 pagesA First Glimpse On Special Relativity: Prasun Duttautkarsh singhNo ratings yet
- Dynamic Analysis of A Point MassDocument7 pagesDynamic Analysis of A Point MassAlessio ScarabelliNo ratings yet
- 1 Elementary PrinciplesDocument52 pages1 Elementary PrinciplesMirza Shahzaib ShahidNo ratings yet
- Minkowski Papers PDFDocument135 pagesMinkowski Papers PDFSrinivas Iyer100% (2)
- Dynamics Kinetics of Particles and Recti PDFDocument46 pagesDynamics Kinetics of Particles and Recti PDFNumero UnoNo ratings yet
- The Special Theory of Relativity. Anadijiban DasDocument225 pagesThe Special Theory of Relativity. Anadijiban DasMarioNo ratings yet
- Predicted Performance of The Superconducting Gravity Gradiometer On The Space ShuttleDocument10 pagesPredicted Performance of The Superconducting Gravity Gradiometer On The Space ShuttleRonny Velosa CardonaNo ratings yet
- Special Relativity Without One Way Velocity AssumptionsDocument19 pagesSpecial Relativity Without One Way Velocity AssumptionsClint EastwoodNo ratings yet
- Time and Background Independence: A ResponseDocument7 pagesTime and Background Independence: A ResponsecalamartNo ratings yet
- Part 1. Special Relativity: PHYS 2022, Yi Wang, Department of Physics, HKUSTDocument34 pagesPart 1. Special Relativity: PHYS 2022, Yi Wang, Department of Physics, HKUSTsdfjksdfjksdkhNo ratings yet
- Taylor - 1 Mass, Force, Newton's LawsDocument26 pagesTaylor - 1 Mass, Force, Newton's LawsJohn JohnsonNo ratings yet
- DePalma NMachineDocument148 pagesDePalma NMachinechumpinflashNo ratings yet
- Acta Numerica 1999 Volume 8 CompressDocument299 pagesActa Numerica 1999 Volume 8 CompressFernanda LuisaNo ratings yet
- A General Actuator Model Based On Nonlinear Equivalent NetworksDocument11 pagesA General Actuator Model Based On Nonlinear Equivalent NetworksAnjireddy ThatiparthyNo ratings yet
- 300123Document15 pages300123Basharat Ali HaiderNo ratings yet
- Albert Einstein His Annus Mirabilis 1905Document19 pagesAlbert Einstein His Annus Mirabilis 1905lp456No ratings yet