You might also like
- T (X, Y) + T (X, Y) 0: Deriva DerivaDocument1 pageT (X, Y) + T (X, Y) 0: Deriva DerivaValaur Ekbalam M BNo ratings yet
- Convex Optimization DualityDocument24 pagesConvex Optimization Dualitybillie quantNo ratings yet
- Heavy-Tailed Innovations in The R Package Stochvol: PrefaceDocument8 pagesHeavy-Tailed Innovations in The R Package Stochvol: PrefaceanirudhjayNo ratings yet
- Seminar 3Document8 pagesSeminar 3EnnyNo ratings yet
- Mathematics I EN Chapter 1Document10 pagesMathematics I EN Chapter 1Oihane BermejoNo ratings yet
- Lab 3 Am DemodulationDocument12 pagesLab 3 Am DemodulationZabeehullahmiakhailNo ratings yet
- Minimax: 1 The Parks-Mcclellan Filter Design MethodDocument11 pagesMinimax: 1 The Parks-Mcclellan Filter Design MethodCristóbal Eduardo Carreño MosqueiraNo ratings yet
- Mathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionDocument9 pagesMathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionHumairoh AnNo ratings yet
- Mathematics I en Chapter 1Document11 pagesMathematics I en Chapter 1sempiNo ratings yet
- ISOM2500Practice - Quiz 2 SolDocument5 pagesISOM2500Practice - Quiz 2 SoljayceeshuiNo ratings yet
- Existence Result For A Fractional Differential Equation Involving A Special DerivativeDocument11 pagesExistence Result For A Fractional Differential Equation Involving A Special DerivativeBoutiara AbdellatifNo ratings yet
- Lab 3Document6 pagesLab 3talal pervaizNo ratings yet
- Normal Distribution Probabilities and Values CalculatorDocument5 pagesNormal Distribution Probabilities and Values CalculatorHoang NguyenNo ratings yet
- Assignment 2Document3 pagesAssignment 2Shanmukesh YadavNo ratings yet
- 1stmid PDFDocument5 pages1stmid PDFbingoNo ratings yet
- Array ProcessingDocument24 pagesArray ProcessingAbeer ChaudhryNo ratings yet
- Riemann IntegrationDocument12 pagesRiemann IntegrationManish cNo ratings yet
- Tarea 20 Ecuacion de OndaDocument4 pagesTarea 20 Ecuacion de OndaCristobal DavidNo ratings yet
- Sel 4000 SetDocument1 pageSel 4000 SetMooh ChotirangseeNo ratings yet
- Quartiles and PercentilesDocument14 pagesQuartiles and PercentilesCeline GalvezNo ratings yet
- 3 Abonus BDocument3 pages3 Abonus BJAyNo ratings yet
- Constraint Logic Programming SlidesDocument10 pagesConstraint Logic Programming SlidesFrankNo ratings yet
- Probability and StatisticsDocument21 pagesProbability and StatisticsREDDY GARI ABBAINo ratings yet
- Prelab Work For Experiment 02: Shani Perera (GNP 78160)Document2 pagesPrelab Work For Experiment 02: Shani Perera (GNP 78160)shaniNo ratings yet
- Chapter 5: Common Distributions: 5.1 The Normal DistributionDocument21 pagesChapter 5: Common Distributions: 5.1 The Normal DistributionMunem ShahriarNo ratings yet
- Sparsity-Based Collaborative Sensing in Scalable UAV NetworksDocument8 pagesSparsity-Based Collaborative Sensing in Scalable UAV Networks张水梅No ratings yet
- hw3 SolDocument10 pageshw3 SolAnkur AgarwalNo ratings yet
- Solutions OPERATOR THEORY Mathematic87.BlogfaDocument39 pagesSolutions OPERATOR THEORY Mathematic87.BlogfaSusu Salim SandNo ratings yet
- Proakis ch05Document81 pagesProakis ch05OHNo ratings yet
- MATH2040A/B Homework 8 SolutionDocument3 pagesMATH2040A/B Homework 8 SolutionPerepePereNo ratings yet
- MAT 771 Functional Analysis Homework ProblemsDocument5 pagesMAT 771 Functional Analysis Homework ProblemsYilma ComasNo ratings yet
- Digital Control - Part Ii: Mieec, Deec, FeupDocument49 pagesDigital Control - Part Ii: Mieec, Deec, FeupDdnunodd NndanielnnNo ratings yet
- Jeff PDFDocument7 pagesJeff PDFJefferson PabatangNo ratings yet
- B. Frequency Domain Representation of Lti Systems: ObjectiveDocument4 pagesB. Frequency Domain Representation of Lti Systems: Objectivenaiksuresh100% (1)
- Basic Prerequisite Knowledge: 0.1. Distributions: Normal, and F Normal DistributionDocument13 pagesBasic Prerequisite Knowledge: 0.1. Distributions: Normal, and F Normal Distributionwissam sadiqNo ratings yet
- Slides SignalRepresentationDocument42 pagesSlides SignalRepresentationHuongNguyenNo ratings yet
- Comp 08 SolDocument4 pagesComp 08 Soltuantuan8951No ratings yet
- Week - 10Document34 pagesWeek - 10riotseeker12No ratings yet
- Chapter 5: Location Estimators: Main ConceptsDocument4 pagesChapter 5: Location Estimators: Main ConceptsJohn Paul Lagunilla GitoNo ratings yet
- Wave Equation Solutions in Higher DimensionsDocument17 pagesWave Equation Solutions in Higher DimensionsYudistira Adi NNo ratings yet
- Log Polar ManualDocument5 pagesLog Polar ManualnospoonNo ratings yet
- Property UWscriptstyle Pi UWP Under PerturbationsDocument18 pagesProperty UWscriptstyle Pi UWP Under Perturbationsaznay zakariaeNo ratings yet
- Old Midterm SolsDocument5 pagesOld Midterm SolspictureswithmotionNo ratings yet
- Impulse To Noise RatioDocument8 pagesImpulse To Noise RatioAndresScribd2014No ratings yet
- Queueing Theory Chapter Explains Waiting LinesDocument10 pagesQueueing Theory Chapter Explains Waiting LinesjnfzNo ratings yet
- EECE 301 Signals & Systems Note Set #15 on CT Filters & Frequency ResponseDocument14 pagesEECE 301 Signals & Systems Note Set #15 on CT Filters & Frequency ResponseahmdNo ratings yet
- SC LabDocument50 pagesSC Labponuselvi20114No ratings yet
- Matlab Lab 8Document11 pagesMatlab Lab 8Viviana SolízNo ratings yet
- 4-RC DC Circuit Sohaila REportDocument5 pages4-RC DC Circuit Sohaila REportsohaila gaberNo ratings yet
- Find The Maximum and Minimum Values of F (X, Y) Over A Region RDocument1 pageFind The Maximum and Minimum Values of F (X, Y) Over A Region RThiagoDuarteNo ratings yet
- Linear transformations and their propertiesDocument2 pagesLinear transformations and their propertiesYonatan KesselmanNo ratings yet
- Ex3 SolutionsDocument3 pagesEx3 SolutionsYonatan KesselmanNo ratings yet
- Lapalace Transform PDFDocument6 pagesLapalace Transform PDFSameer KhanNo ratings yet
- Quiz-1 Solns PDFDocument1 pageQuiz-1 Solns PDFN DhamaNo ratings yet
- Intuitionistic Fuzzy Differential EquationDocument4 pagesIntuitionistic Fuzzy Differential EquationSyifa IfanyaNo ratings yet
- Estimation Theory Best Linear Unbiased Estimators (BLUEDocument30 pagesEstimation Theory Best Linear Unbiased Estimators (BLUEprobability2No ratings yet
- Prof MT Nair NotesDocument9 pagesProf MT Nair NotesChaitanya ShankarNo ratings yet
- W5 20190214 Group1 MatlabreportDocument18 pagesW5 20190214 Group1 MatlabreportVõ Hoàng ChươngNo ratings yet
- PowerDocument29 pagesPowerAbhijit WankhedeNo ratings yet
- MFRS 8 Operating SegmentDocument2 pagesMFRS 8 Operating SegmentSree Mathi Suntheri100% (1)
- LA Metro - 168Document2 pagesLA Metro - 168cartographicaNo ratings yet
- Caltrain weekend shuttle connects Tamien, Diridon stationsDocument1 pageCaltrain weekend shuttle connects Tamien, Diridon stationsSidhu0017No ratings yet
- Data Upah Trans Dana Profitri Unit Kereta Commuter IndonesiaDocument9 pagesData Upah Trans Dana Profitri Unit Kereta Commuter IndonesiaApdal YudhistiraNo ratings yet
- Sounder Train Schedules: Lakewood To Seattle (Northbound)Document2 pagesSounder Train Schedules: Lakewood To Seattle (Northbound)Mason McCormickNo ratings yet
- Smart Plan MapDocument1 pageSmart Plan MapChris GothnerNo ratings yet
- Northeast Corridor Schedule 22Document4 pagesNortheast Corridor Schedule 22ClaraElenaMontesNo ratings yet
- SEPTA Regional Rail & Rail Transit: NW SW NE SEDocument1 pageSEPTA Regional Rail & Rail Transit: NW SW NE SERanderall TagahassellhoffNo ratings yet
- Oyster Bay Train ScheduleDocument1 pageOyster Bay Train Scheduleanthonybottan100% (1)
- Monday Through Friday: Eastbound Al EsteDocument2 pagesMonday Through Friday: Eastbound Al EsteMetro Los AngelesNo ratings yet
- LA Metro - 761Document4 pagesLA Metro - 761cartographica100% (1)
- Printer-Friendly Caltrain Schedule: PM AMDocument4 pagesPrinter-Friendly Caltrain Schedule: PM AMAVC TOONo ratings yet
- Melbourne to Ballarat train timesDocument6 pagesMelbourne to Ballarat train timesyenNo ratings yet
- Advent Bart Shuttle Schedule: Am ServiceDocument3 pagesAdvent Bart Shuttle Schedule: Am ServiceSaurabh MishraNo ratings yet
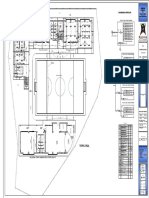
- Electricas-01 IEDocument1 pageElectricas-01 IEDANIEL MARDOQUEO QUISPE MEZANo ratings yet
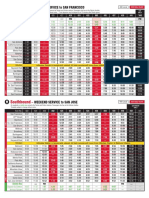
- Northbound: Weekend Service To San FranciscoDocument1 pageNorthbound: Weekend Service To San FranciscoAVC TOONo ratings yet
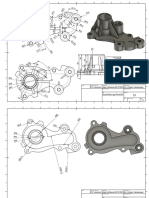
- Planos de Las Piezas de La Bomba de AguaDocument11 pagesPlanos de Las Piezas de La Bomba de AguaJosé CNo ratings yet
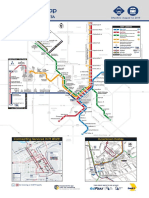
- Dart / Tre / Texrail / Dcta: Rail System MapDocument1 pageDart / Tre / Texrail / Dcta: Rail System MapSudhit SethiNo ratings yet
- Commuter Rail Map: Massachusetts Bay Transportation AuthorityDocument1 pageCommuter Rail Map: Massachusetts Bay Transportation AuthorityJayarma ParlikadNo ratings yet
- Metro Gold Line Foothill Extension MapDocument1 pageMetro Gold Line Foothill Extension MapLos Angeles Daily NewsNo ratings yet
- Doc637541838 612447676Document9 pagesDoc637541838 612447676Brittany RamirezNo ratings yet
- Crashinfo Iosd 20160706-203025-UtcDocument503 pagesCrashinfo Iosd 20160706-203025-Utczhangsx97No ratings yet
- Metrolink Arrow Schedule Timetable May 22 2023Document19 pagesMetrolink Arrow Schedule Timetable May 22 2023Edgar MonsivaisNo ratings yet
- SEPTA Train Schedule - Market East To Walling FordDocument2 pagesSEPTA Train Schedule - Market East To Walling FordfaisalalamNo ratings yet
- Wa0012Document4 pagesWa0012Gekris LandiNo ratings yet
- Ejercicio - CamaraDocument15 pagesEjercicio - Camarat1512700621No ratings yet
- UntitledDocument88 pagesUntitledZola WorkerNo ratings yet
- Miami Dade Transit Route MapDocument1 pageMiami Dade Transit Route MapdamienleeNo ratings yet
- Trasfor: Rolling StockDocument8 pagesTrasfor: Rolling Stockyunus emre Kılınç100% (1)
- Pokemon MiniDocument62 pagesPokemon Minipako.duchanes100% (4)