You might also like
- 8 2 Mass Spring Damper Tutorial 11-08-08Document11 pages8 2 Mass Spring Damper Tutorial 11-08-08khayat100% (4)
- AE5337 Homework 2 LiuDocument15 pagesAE5337 Homework 2 LiuEdwardNo ratings yet
- Sy Sem 2 Maxima Practical 11,12Document13 pagesSy Sem 2 Maxima Practical 11,122813Ritesh khaireNo ratings yet
- MATLAB Command Window: The Phi Apim1 Aim1 Ti Di L1 L2 L3 t1 t2 t3Document3 pagesMATLAB Command Window: The Phi Apim1 Aim1 Ti Di L1 L2 L3 t1 t2 t3jiyoungryuNo ratings yet
- AE5337 Homework 5 LiuDocument28 pagesAE5337 Homework 5 LiuEdwardNo ratings yet
- Calculo VectorialDocument16 pagesCalculo VectorialCristian HuamaníNo ratings yet
- 智能机器人 第三次作业Document11 pages智能机器人 第三次作业Tongkai XuNo ratings yet
- Lab 3Document15 pagesLab 3N MNo ratings yet
- Hough Transform in Matlab: - If We Find An Edge Point at (Ix, Iy), We Loop Through All Possible Values of ThetaDocument11 pagesHough Transform in Matlab: - If We Find An Edge Point at (Ix, Iy), We Loop Through All Possible Values of ThetaLe QuyenNo ratings yet
- Jatin Katiyar Signals and Systems LabDocument82 pagesJatin Katiyar Signals and Systems LabJatin katiyarNo ratings yet
- In Lab ExerciseDocument5 pagesIn Lab ExerciseShalini JainNo ratings yet
- CT 303 Digital Communications Lab 9: Heer Gohil 201901135Document25 pagesCT 303 Digital Communications Lab 9: Heer Gohil 201901135H GNo ratings yet
- btvn3 RobotDocument9 pagesbtvn3 RobotThọ ĐỗNo ratings yet
- Rob Otik 08112021Document2 pagesRob Otik 08112021ismayıl MammadovNo ratings yet
- Function Normxcorr2Document3 pagesFunction Normxcorr2informal77No ratings yet
- Example From SlidesDocument17 pagesExample From SlidesShintaNo ratings yet
- Using MATLAB For Dynamic Process Behavior AnalysisDocument2 pagesUsing MATLAB For Dynamic Process Behavior AnalysisHyukLadezaNo ratings yet
- Code NozzleDocument8 pagesCode NozzleBijyendra KumarNo ratings yet
- % Adaptive Project - QuadcopterDocument12 pages% Adaptive Project - QuadcopterirqoviNo ratings yet
- String AlgorithmDocument17 pagesString AlgorithmHafidz Jazuli LuthfiNo ratings yet
- Frequency Modulation by Varactor Modulator and Frequency Demodulation by Foster-Seeley DetectorDocument8 pagesFrequency Modulation by Varactor Modulator and Frequency Demodulation by Foster-Seeley DetectorMdMorshedulHaqueNo ratings yet
- Robotika HW5 428626 NarDocument3 pagesRobotika HW5 428626 Narpalax1234No ratings yet
- Signals LAB5Document7 pagesSignals LAB5Hala mezyedNo ratings yet
- 1 Double Pendulum Equations of Motion: MG: 11 F Evrier 2010Document6 pages1 Double Pendulum Equations of Motion: MG: 11 F Evrier 2010dontknowhow0% (1)
- For Lab 4: 'Press 1 For Alpha Ii /npress 2 For Rhino /npress 3 For Scara / Npress 4 For Intellidex' 'Choose Number:'Document10 pagesFor Lab 4: 'Press 1 For Alpha Ii /npress 2 For Rhino /npress 3 For Scara / Npress 4 For Intellidex' 'Choose Number:'Zain AlamgirNo ratings yet
- Lab Report No. 10: Signals& Systems EEE-223Document9 pagesLab Report No. 10: Signals& Systems EEE-223Tayyab AhmedNo ratings yet
- CS1010E: Programming Methodology: Tutorial 08: Matrices 27 Mar 2017 - 31 Mar 2017Document10 pagesCS1010E: Programming Methodology: Tutorial 08: Matrices 27 Mar 2017 - 31 Mar 2017Kyle SangmaNo ratings yet
- Tutorial 5Document3 pagesTutorial 5Kertanaa KumarNo ratings yet
- Let Us C SolnDocument15 pagesLet Us C SolnSrinivas Surapaneni50% (2)
- Lab 7Document8 pagesLab 7Noor UL AaienNo ratings yet
- Vea Pa Que Se Entretenga AprendiendoDocument24 pagesVea Pa Que Se Entretenga AprendiendoJoseph Borja HernandezNo ratings yet
- SPCC PracticalssDocument6 pagesSPCC Practicalssajay bangarNo ratings yet
- Anadi Anant JainDocument118 pagesAnadi Anant JainAnadi Anant JainNo ratings yet
- Let Us C SolutionDocument16 pagesLet Us C Solutionshubham1402No ratings yet
- Assignment 2: AnswerDocument13 pagesAssignment 2: AnswerAkash Ranjan SahooNo ratings yet
- Assignment 1Document11 pagesAssignment 1Muhammad FahimNo ratings yet
- Assignment2 Am56303Document20 pagesAssignment2 Am56303Anuj SaidNo ratings yet
- Lecture O03: ENGR90024 Computational Fluid DynamicsDocument43 pagesLecture O03: ENGR90024 Computational Fluid DynamicsAbdul RahimNo ratings yet
- Laboratory in Automatic Control: Lab 3 Analysis of State Variable ModelsDocument22 pagesLaboratory in Automatic Control: Lab 3 Analysis of State Variable ModelsnchubcclNo ratings yet
- S2 Mathematics Module 1 HandoutDocument32 pagesS2 Mathematics Module 1 HandoutAakanksha KartikNo ratings yet
- Robot RaplimDocument1 pageRobot RaplimSebastian Rodriguez100% (1)
- Hevia ARMA EstimationDocument6 pagesHevia ARMA EstimationAnthanksNo ratings yet
- 28 TAC ExamplesDocument8 pages28 TAC Examplesaptureinc100% (3)
- Documento Triedro de FrenetDocument4 pagesDocumento Triedro de FrenetAlejandra MendietaNo ratings yet
- Espectro de Respuesta en MatlabDocument2 pagesEspectro de Respuesta en MatlabP. ALFREDO BLAS ROJASNo ratings yet
- LectureO06 PDFDocument37 pagesLectureO06 PDFAbdul RahimNo ratings yet
- Sina - L20573754 - Test - 01 Pro (1,6,7)Document11 pagesSina - L20573754 - Test - 01 Pro (1,6,7)TalashNo ratings yet
- MATLAB Files (PDF)Document9 pagesMATLAB Files (PDF)Asad MeerNo ratings yet
- Word TakenDocument13 pagesWord TakensafalNo ratings yet
- Amplitude Modulation: Experiment No:1Document16 pagesAmplitude Modulation: Experiment No:1Verzeo group projectNo ratings yet
- All All: For If Else End EndDocument9 pagesAll All: For If Else End EndMohd Izzat Abd GhaniNo ratings yet
- Duane's Incredibly Brief Introduction To The C Programming LanguageDocument2 pagesDuane's Incredibly Brief Introduction To The C Programming Languagekrishna chaitanyaNo ratings yet
- Lecture 15 - ODEsDocument9 pagesLecture 15 - ODEsWentao HeNo ratings yet
- Revival v3 (Beta)Document232 pagesRevival v3 (Beta)YayaNo ratings yet
- Template For Parameter Estimation With Matlab Optimization Toolbox PDFDocument8 pagesTemplate For Parameter Estimation With Matlab Optimization Toolbox PDFachegesNo ratings yet
- Activity#5-Fourier Series and Fourier TransformDocument3 pagesActivity#5-Fourier Series and Fourier TransformAdrianne BastasaNo ratings yet
- % What Is I, J, C - HT, and D - HT in C - N and D - K? % Not Defined Yet % Not Defined Yet % Not Defined Yet % Not Defined YetDocument3 pages% What Is I, J, C - HT, and D - HT in C - N and D - K? % Not Defined Yet % Not Defined Yet % Not Defined Yet % Not Defined YetEmma Smith FiverrNo ratings yet
- Department of Cse: D.Sai Vivek 18R21A05D4 Data Structures Lab WEEK - 13Document11 pagesDepartment of Cse: D.Sai Vivek 18R21A05D4 Data Structures Lab WEEK - 13Gitika Suma AttaluriNo ratings yet
- MatlabDocument25 pagesMatlabMuhammad TayyabNo ratings yet
- Visio-Drawing1 Copy-1691823179070Document1 pageVisio-Drawing1 Copy-1691823179070Marvin ItolondoNo ratings yet
- Nwankwo Ukamaka ChiomaDocument4 pagesNwankwo Ukamaka ChiomaMarvin ItolondoNo ratings yet
- Vassignment 1Document4 pagesVassignment 1Marvin ItolondoNo ratings yet
- Geometric Design of A Highway Using Autocad Civil 3D: Presenter NameDocument12 pagesGeometric Design of A Highway Using Autocad Civil 3D: Presenter NameMarvin ItolondoNo ratings yet
- Geometric Design of A Highway Using Autocad Civil 3D: Presenter NameDocument11 pagesGeometric Design of A Highway Using Autocad Civil 3D: Presenter NameMarvin ItolondoNo ratings yet
- Saudi Arabia Stock MarketDocument16 pagesSaudi Arabia Stock MarketMarvin ItolondoNo ratings yet
- Project Designing A Habitat in MarsDocument13 pagesProject Designing A Habitat in MarsMarvin ItolondoNo ratings yet
- Kabasis-15 - BBS Concrete Sleeper DetailsDocument1 pageKabasis-15 - BBS Concrete Sleeper DetailsMarvin ItolondoNo ratings yet
- Steel I - Beam Calculation Note Steel I - Beam Calculation NoteDocument2 pagesSteel I - Beam Calculation Note Steel I - Beam Calculation NoteMarvin ItolondoNo ratings yet
- CIV E 482 - Design Lab Stromwater Management: What Is The Importance of Today's Lab?Document14 pagesCIV E 482 - Design Lab Stromwater Management: What Is The Importance of Today's Lab?Marvin ItolondoNo ratings yet
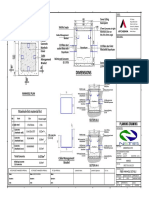
- Kabasis-16 - Fiber Manhole DetailsDocument1 pageKabasis-16 - Fiber Manhole DetailsMarvin ItolondoNo ratings yet
- Factoring The Load Demand: SolutionDocument8 pagesFactoring The Load Demand: SolutionMarvin ItolondoNo ratings yet
- The Report: Sewer DesignDocument20 pagesThe Report: Sewer DesignMarvin ItolondoNo ratings yet
- Planning Drawing: Bts Concrete Sleepers Material ListDocument1 pagePlanning Drawing: Bts Concrete Sleepers Material ListMarvin ItolondoNo ratings yet
- CIVE263 Portfolio Marking Pro Forma v4Document3 pagesCIVE263 Portfolio Marking Pro Forma v4Marvin ItolondoNo ratings yet
- Freddie Jeffries - Fang You - Hajie Shan - Linghao Chen - Mischa Patel - Hywel BeasdaleDocument39 pagesFreddie Jeffries - Fang You - Hajie Shan - Linghao Chen - Mischa Patel - Hywel BeasdaleMarvin ItolondoNo ratings yet
- CIVE263 Group Design Project Brief 2019-20 v6Document15 pagesCIVE263 Group Design Project Brief 2019-20 v6Marvin ItolondoNo ratings yet
- Kabasis-12 - Generator Concrete SleeperDocument1 pageKabasis-12 - Generator Concrete SleeperMarvin ItolondoNo ratings yet
- Ruth Paper Instruction Revised (6) - 1Document2 pagesRuth Paper Instruction Revised (6) - 1Marvin ItolondoNo ratings yet
- Risk Assessment LegendDocument1 pageRisk Assessment LegendMarvin ItolondoNo ratings yet
- Global Corporation-Customer Sales Data T1 2020Document31 pagesGlobal Corporation-Customer Sales Data T1 2020Marvin ItolondoNo ratings yet
- Native Bush Spices Australia: Project ScopeDocument1 pageNative Bush Spices Australia: Project ScopeMarvin ItolondoNo ratings yet
- 03 Obst515 Ruth Title Page and Bibliography Rubric 1Document1 page03 Obst515 Ruth Title Page and Bibliography Rubric 1Marvin ItolondoNo ratings yet